城市道路車輛行駛照明范圍需求研究
2018-05-09 01:29:12冀俊明張紅濤扶原放
汽車電器 2018年4期
吳 巍,冀俊明,張紅濤,李 娜,扶原放
(長安汽車股份有限公司 北京研究院,北京 100000)
隨著社會經濟的發展,汽車在中國越來越普及,已成為人們生活中不可或缺的交通和運輸工具。然而,隨著汽車保有量的上升,道路交通事故也逐年呈上升趨勢。汽車安全事故統計資料表明:全球每年汽車交通事故死亡人數達50萬。而這些交通事故中,夜間發生的數量為白天的3倍,照明狀況不良時的事故率又是照明良好時的3倍,足見前照燈在汽車安全性方面的重要作用。
為了更好地評估車輛前照燈的性能,各國研究機構不斷完善相關標準。其中,CIE 188車輛照明系統性能評價方法經批準并形成技術報告。該報告提出了一種前照燈光學性能評估方法,其中道路照明部分涵蓋了遠、近光的照明距離、行人可見度、照明寬度、彎道能見度、十字路口行人可見度等維度。然而,該報告未對道路實際照明范圍需求進行研究。本文參考CIE 188技術報告評估維度,結合中國城市道路設計標準,對中國城市道路車輛行駛所需最低照明范圍進行了分析研究。
1 CIE 188車輛照明系統性能的評價方法
汽車前照燈的作用是照明車輛前方道路標識、邊界和交通標識等特征,以便駕駛員保持行駛過程中對車輛的控制。另外,駕駛員還需要對行人和其他道路使用者進行識別。為了確保性能評估時充分考慮這些要求,所以在高于道路表面0.25m的水平面對性能進行評估。0.25m高度平面是行人小腿中點的平均高度[1],有的主機廠對路面照度評估也是可行的,本文研究內容對2種高度均適用。
另外,現有研究顯示,3lx照度是能夠確保發現道路特征、行人和障礙物的照度下限,故本文以3lx作為照明范圍的基準照度。當然也有研究表明5lx照度是能夠識別上述目標的照度下限,也可以研究基準,但這將使前照燈性能要求大大提高。
由于受到安裝高度、電壓/電流、光通量等因素影響,前照燈實際性能與實驗室測量結果有所不同,CIE 188的核心內容,就是制定了實際安裝情況下前照燈性能的評估方法。CIE 188對前照燈遠近光道路照明的評估維度主要在直行道路、彎道、十字路口的照明距離、寬度等方面,如圖1所示。本文將在上述維度基礎上增加坡道路況進行研究。
2 中國城市道路設計參數
本文主要參考CJJ37—2012《城市道路工程設計規范》和CJJ152—2010《城市道路交叉口設計規程》平面交叉部分進行研究,引用了道路設計速度、車道寬度、圓曲線最小半徑、停車視距、路緣石半徑、最大縱坡等參數。
2.1 道路設計速度
中國城市道路分為快速路、主干路、次干路和支路4個等級,各級道路設計速度如表1所示[2]。其中快速路采用控制出入形式,無非機動車混行和平面交叉。
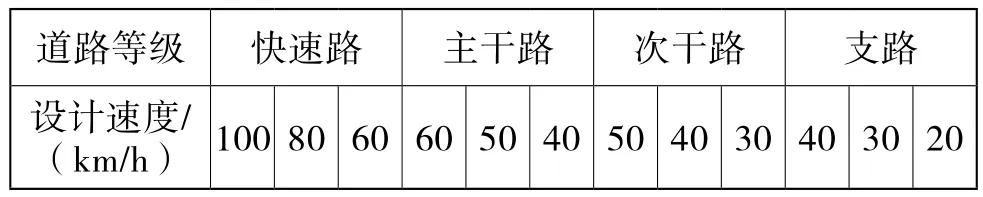
表1 各級城市道路設計速度
2.2 車道寬度
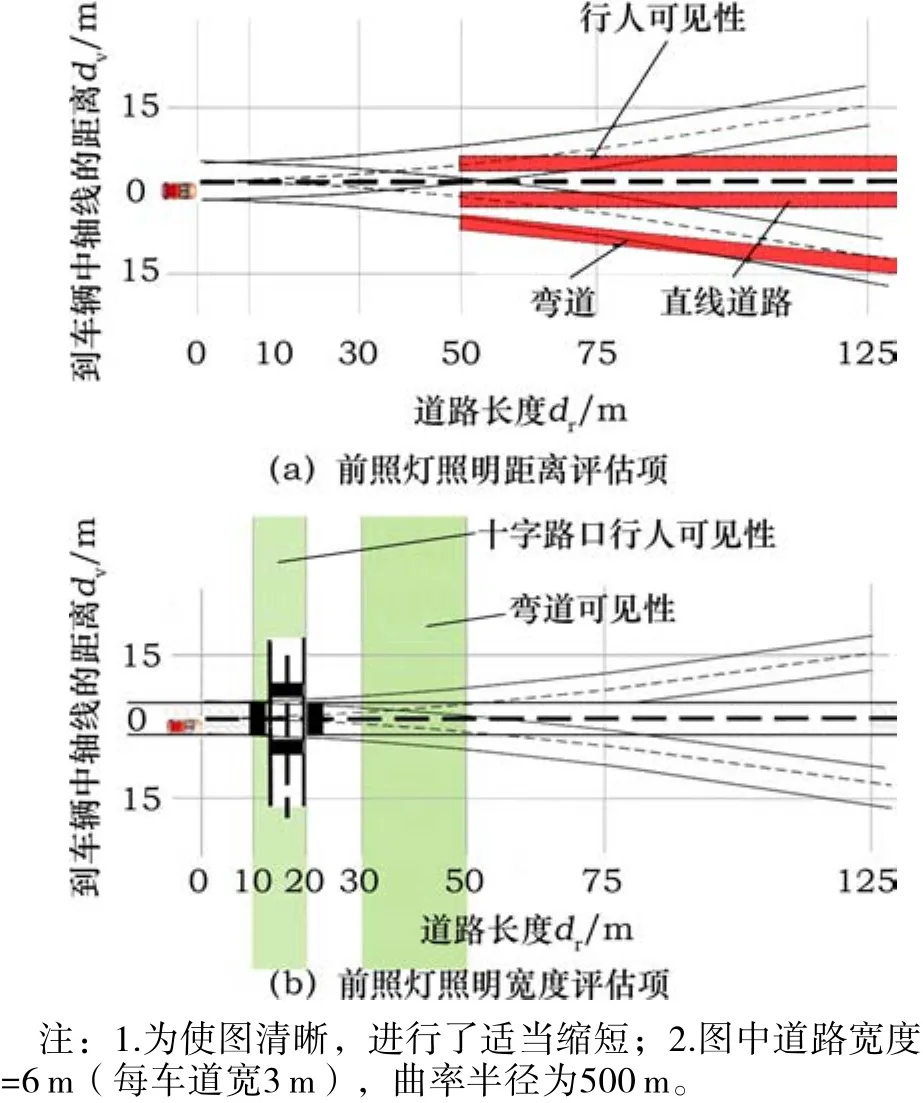
圖1 CIE 188車輛照明系統性能評價方法
中國城市道路車道寬度如表2所示。由于在照明寬度需求計算時寬車道兼容窄車道,為簡化計算,以3.75 m車道寬度作為研究對象。

表2 車道寬度
2.3 圓曲線最小半徑
道路平面線形宜由直線、圓曲線等組成,道路圓曲線最小半徑應符合表3。一般情況下應采用大于或等于不設超高最小半徑值;當地形條件受限制時,可采用設超高最小半徑一般值。
直線與圓曲線或大半徑圓曲線與小半徑圓曲線之間應設緩和曲線。該情況下緩和曲線半徑大于圓曲線。因此在彎道情況下,緩和曲線對照明寬度的需求較圓曲線道路小,故為簡化計算,僅考慮圓曲線半徑。

表3 圓曲線最小半徑
2.4 停車視距
停車視距應大于或等于表4所示的距離要求。本文依據法規給出的參考值進行研究,鼓勵各主機廠根據自身實際性能參數進行研究。

表4 停車視距
2.5 最大縱坡
機動車道最大縱坡應符合表5所示規定,為簡化計算,本文僅對一般值進行研究。由于各設計速度下的道路最小坡長大于其停車視距,故坡道與平面道路相比,對前照燈的照明需求僅在上坡坡峰和下坡坡谷位置有區別,即“凸”形坡和“凹”形坡位置,本文將對這2個路況進行研究。

表5 最大縱坡
2.6 路緣石轉彎半徑
平面交叉口轉角處緣石轉彎半徑如表6所示[3]。

表6 路緣石轉彎半徑
2.7 十字路口形式
十字路口形式分為十字形交叉口和X形交叉口,X形交叉口最小交角宜為70°,如圖2所示。
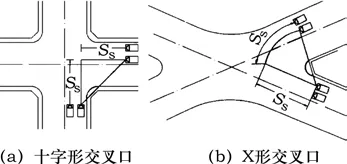
圖2 十字路口形式
3 中國城市道路照明范圍需求
3.1 設計準則
基于上述路況,研究中國城市道路車輛行駛所需的最小3 lx照明范圍。定義研究基本準則如下:①由于設計速度60 km/h以上道路為出入控制形式,故僅考慮時速60 km/h以下道路行人可見度。②主要考慮一般設計指標下的道路照明滿足情況。③在相應車速下,照明范圍應為:當發現前方行人時,應能夠及時制動或加速通過;當不能發現前方行人時,應能在行人之前通過遭遇點,不會發生碰撞。
3.2 直行道路
1)照明距離
根據表4停車視距可知:①在設計時速為60 km/h道路上,本方道路右側邊界3 lx照度的到達距離應≥70 m;②在設計時速為80 km/h道路上,本方道路右側邊界3 lx照度的到達距離應≥110 m;③在設計時速為100 km/h道路上,本方道路右側邊界3lx照度的到達距離應≥160 m。本文以60 km/h及以下時速作為近光分析基礎,60 km/h以上作為遠光分析基礎。
2)照明寬度
橫向照明寬度需求計算過程如下:①計算在各設計速度下行駛所對應停車視距所需的時間t;②設行人橫穿道路速度為1 m/s,計算時間t內所行走的距離L;③橫向照明距離需求=L+車道寬度/2 = L+1.875 m;④近光明暗截止線按50 m落地考慮。
由此得到在各設計速度下車輛行駛停車視距距離的時間內行人行的距離,如表7所示。將數據在路面鋪點并用線形連接,可得在直行道路下,及時制動或加速通過所需的3lx照明距離和寬度,如圖3所示,灰色項表示該車速下的停車視距未超過該距離,不需要考慮該距離照明寬度。
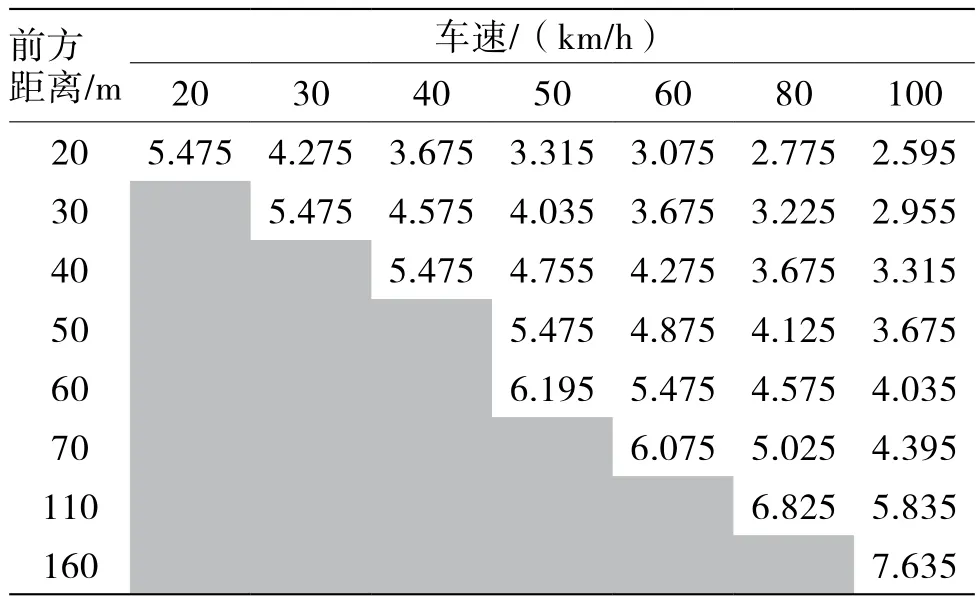
表7 直行道路照明寬度需求參數

圖3 直行道路照明寬度需求曲線
3.3 彎道
照明寬度如圖4所示,彎道照明距離需求計算過程如下:①弧長C=停車視距;②通過公式:圓心角A =,求圓心角A;③α=A/2,通過弦長L=2Rsin(A/2),求出弦長L;④依據α角和弦長L計算在行駛方向上車輛在彎道行駛所需的單側照明寬度。
設超高圓曲線最小半徑一般值情況下,前照燈單側照明寬度為行駛相應停車視距所需的道路照明寬度,加上車輛各設計速度下行駛所對應停車視距所需的時間t內行人橫向移動距離L和車道寬度/2,各停車視距下的寬度值如表8所示。
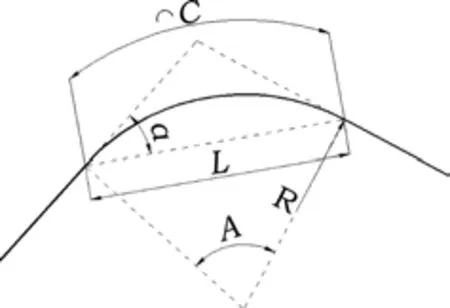
圖4 彎道照明寬度需求
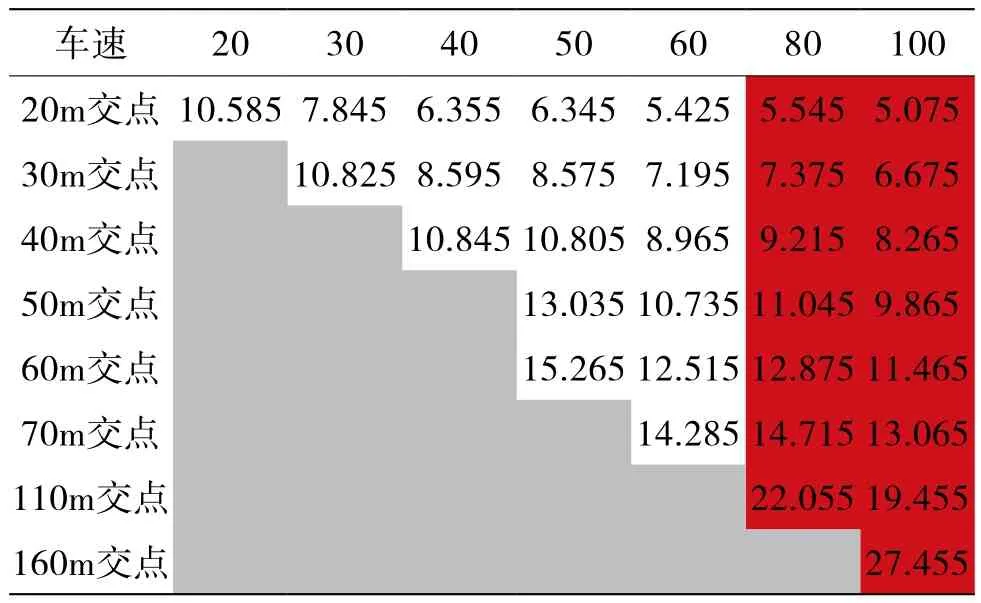
表8 設超高圓曲線最小半徑一般值高配前照燈單側照明寬度需求
依據表8數據在路面鋪點并用線形連接,可得在彎道路況下,及時制動或加速通過所需的3 lx照明距離和寬度,如圖5所示。
圖5 彎道照明寬度需求曲線
3.4 十字路口
平面交叉口轉彎速度應按組成交叉口設計速度的50%計算,如表9所示。60 km/h以上車速為快速路,不需要考慮交叉口速度。

表9 十字路口行車速度
根據表2、表6和圖2構建的十字路口模型,選取30 km/h和20 km/h轉彎速度進行研究。十字路口照明距離需求計算過程如下:①弧長C=停車視距;②通過公式:圓心角A =,求圓心角A;③通過圓心角A,考慮行人速度,確定弦長L的終點;④依據α角和弦長L計算在行駛方向上,各設計速度下,車輛在彎道行駛所需的單側照明寬度。設計轉彎速度30 km/h十字路口照明距離需求如圖6所示,20 km/h數據略。
將數據在路面鋪點并用線形連接,可得:在十字路口相應距離和車速下,及時制動或加速通過時所需的3 lx照明距離和寬度,如圖7所示。
3.5 坡道
各級道路縱坡變化處應設置豎曲線,豎曲線宜采用圓曲線,豎曲線最小半徑與豎曲線最小長度應符合表10所示。由圖8可知,當角α1與α2為極限值時道路傾角最大,當弧長L為極限值時豎曲線半徑最小,故針對極限情況進行研究。
1)凹形坡道
凹形坡道燈光上揚角度計算過程如下:通過公式α=180L/πr,求得各安裝高度下的燈光相對路面上揚角度α,其中,L為豎曲線弧長,r為豎曲線半徑。
對比直行道路停車視距燈光偏角與凹形坡燈光角度變化可知,僅憑借固定位置的近光不能滿足坡道安全視距要求,需配合近光高度調節裝置、降速行駛或使用遠光等輔助手段滿足安全視距要求,故本文不再繼續研究。
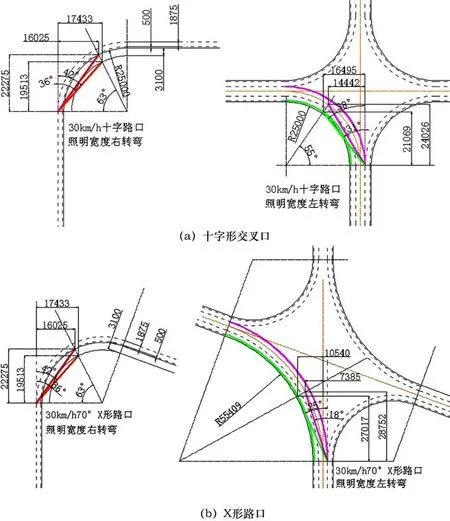
圖6 設計轉彎速度30 km/h十字形交叉口照明寬度需求
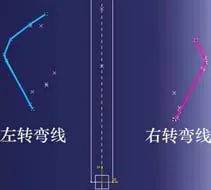
圖7 十字路口照明寬度需求曲線
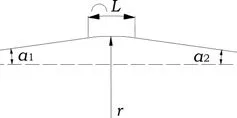
圖8 坡道道路設計參數
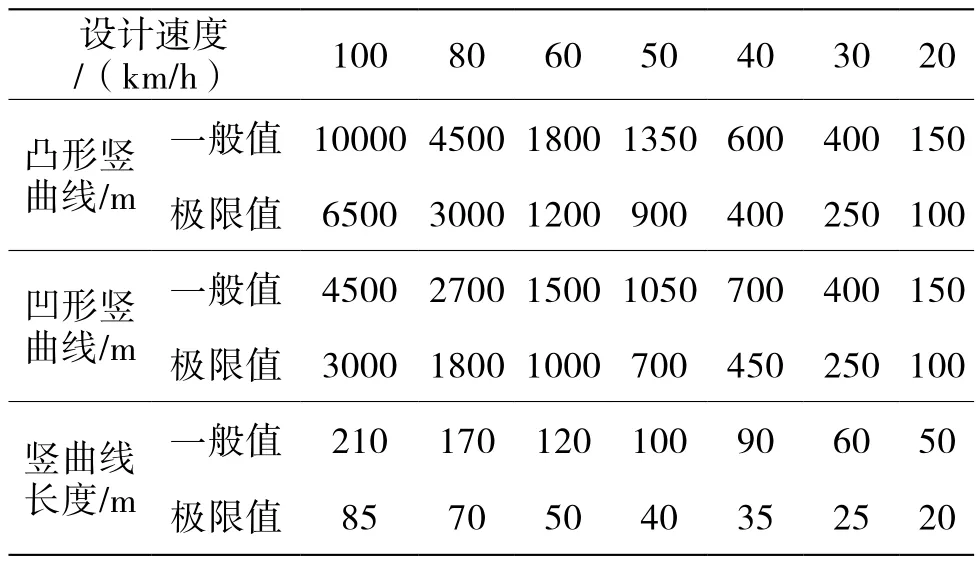
表10 豎曲線最小半徑與豎曲線最小長度
2)凸形坡道
凸形坡道情況下(一般值和極限值),燈光無法照射到相應安全視距(數據略),在凸形坡道時應降速行駛,故本文不再繼續研究。
3.6 特殊路況——近光近場
由于中國城市道路情況的特殊性,在近光近場區域(30 m前)需要較大的寬度以保證行人較多路況的行駛安全,故高配車型近光需盡最大可能滿足人眼30°視場照明范圍,即在前方20~30 m區域應采用十字路口轉彎照明需求線或視場線的較大值,如圖9所示。
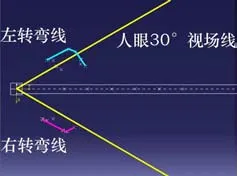
圖9 十字路口轉彎照明需求線與人眼視場線
人眼30°視場在20 m和30 m處單邊寬度分別為7.28 m和17.32 m,分別可滿足識別1 m/s和4 m/s速度行人識別需求。人眼視場線與十字路口轉彎照明需求線相比較,在車前10~25 m范圍內十字路口轉彎照明需求線更寬,故選取該線作為照明需求線。
3.7 光形復合
1)近光
以直行道路線、設超高彎道一般值線、左右轉彎線、人眼視場線截取相應視距部分以輔助線連接,形成近光3 lx照度最小光形范圍需求符合曲線,如圖10所示。其中人眼視場線外側的左右轉彎線可僅在具備彎道照明功能時滿足,其他路況時滿足人眼視場線。
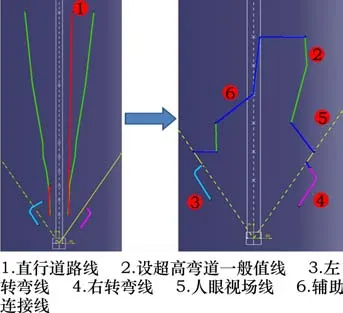
圖10 近光3 lx最小照明范圍
2)遠光
以直行道路線、設超高彎道一般值線、左右轉彎線截取相應視距部分以輔助線連接,形成遠光3 lx照度最小光形范圍需求符合曲線,如圖11所示。其中人眼視場線外側的左右轉彎線可僅在具備彎道照明功能時滿足,其他路況時滿足人眼視場線。另外,遠光輔助線前部端點處弧線對于照射距離影響較小(高配約1.6 m),故忽略本方案道路寬度影響。
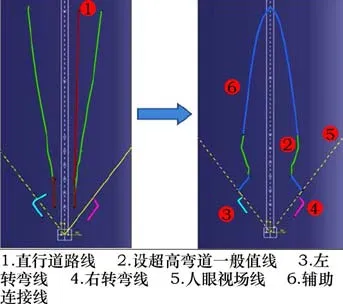
圖11 遠光3 lx最小照明范圍
4 總結
將所得曲線與目前主機廠評估前照燈性能的測點標準相比較,本文研究所得3 lx照度范圍曲線與現行測點評估標準相符,且對現行標準未涉及區域進行了補充,并結合CIE 188和中國道路特點,以及人眼視場特性,能夠為光學設計提供一定參考。
參考文獻:
[1] CIE 188—2010,PERFORMANCE ASSESSMENT METHOD FOR VEHICLE HEADLIGHTING SYSTEMS[S].
[2] CJJ37—2012,城市道路工程設計規范[S].
[3] CJJ152—2010,城市道路交叉口設計規程[S].
