基于位置式PID算法的壓力控制設計及MATLAB仿真
2018-05-10 05:10:32楊龍
電子技術與軟件工程 2018年24期
楊龍


摘要 壓力是工程上常見的物理量。對壓力進行實時閉環控制是工程上經常需要解決的技術問題。文章討論了位置式PID控制算法,并把位置式PID控制算法引用到壓力控制設計中,實現了對壓力的閉環控制。通過MATLAB仿真,驗證了該設計達到了預期控制目的。
【關鍵詞】PID算法 壓力控制 MATLAB仿真
壓力(即壓強)被稱為四大熱工參數之一,它在工業中占有舉足輕重的地位。在工程實踐中,常見的是對壓力的檢測和控制。比如:鍋爐壓力、天燃氣管道壓力、汽車輪胎壓力、壓力試驗機的壓力等都需要檢測和控制。壓力檢測主要通過各種儀器儀表進行人工檢測和力學傳感器進行自動檢測。壓力控制主要通過不同的技術手段進行開環或閉環控制。常見的壓力閉環控制通常是通過各種PID控制算法來實現。
PID控制算法相對簡單、魯棒性好、工作可靠、穩定性好、調整方便,被廣泛應用于過程控制和運動控制中。
1控制算法
1.1 PID控制原理
PID是比例、積分、微分英文單詞首字母的組合。它是在連續控制系統中技術最成熟,應用最廣泛的一種調節控制方式。PID控制根據系統的誤差,利用比例計算、積分計算、微分計算得出控制量進行控制,從而達到穩定輸出的目的。
簡單地說,PID控制器各單元的作用如下.
(1)比例單元:成比例地放大或縮小控制系統的偏差信號e(t),只要被控制量偏離其給定的目標值,控制器便會產生與偏差信號成正比的輸出信號,通過執行器使偏差減小。
(2)積分單元:主要用來消除靜差,提高系統的無差度。只要被控制量存在偏差,其輸出的調節作用便隨時間不斷加強,直至偏差為零。積分作用的強弱取決于積分時間常數T1,T1越小,積分作用越強,反之則越弱。
(3)微分單元:反映偏差信號的變化趨勢(即變化速率),并能在偏差信號出現或變化的瞬間,立即根據變化的趨勢,在系統中自動引入一個有效的早期修正信號,從而加快系統的調整速度,減少調節時間。1.2位置式PID算法
按照模擬PID控制算法,用一系列的采樣時刻點kT (k=l,2,3,…)近似代替連續時間t,用矩形法數值積分近似代替積分,用一階后向差分近似代替微分,即:
式中,ki=kp/Ti,kd=kpTD,T為采樣周期,k為采樣序列號,k=l,2,3,…,e(k-l)和e(k)分別為第(k-l)和第k時刻所對應的偏差信號。
這里的u(k)是PID控制器的輸出信號。該輸出信號用來直接控制執行機構。電液比例閥是工程上常見的執行機構。通常用u(k)控制電液比例閥的開啟程度,和閥門的開啟程度位置一一對應,所以通常把這種算法稱為位置式PID算法。
2控制系統設計
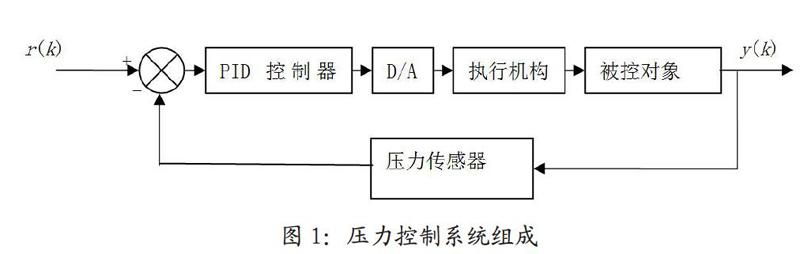
壓力控制系統如圖1所示,由PID控制器、D/A轉換器、執行機構、被控對象等組成。
r(k)為輸入的控制信號,即根據工程需要給定的控制目標壓力值。y(k)為系統輸出的實際壓力值。PID控制器由軟件實現,這里采用位置式PID控制算法。D/A轉換器把PID控制器輸出的數字信號轉換為模擬信號。執行機構具體實現壓力調整。壓力控制系統中通常用電動機拖動的螺旋副、齒輪泵或電液比例閥作為執行機構,來改變壓力的大小。壓力傳感器作為反饋環節,把輸出的壓力信號y(k)反饋到輸入端,和輸入信號共同影響PID控制器的輸入,從而構成閉環負反饋來自動調節系統輸出。有時需要驅動電路模塊,把D/A轉換器輸出的模擬信號進行整形放大,便于驅動執行機構。
3 MATLAB-仿真
MATLAB是MathWorks公司開發的一款功能強大的數值計算軟件,是研究和仿真各種系統的出色工具。具有動態建模、仿真及綜合分析等功能。
現利用MATLAB環境,以被控對象為電機模型為例,采用MATLAB語句形式進行仿真。假設電機模型傳遞函數為:
Js2+ Bs
式中,令J=0.0065,B=0.15。
采用M函數的形式,利用ODE45的方法求解連續對象方程,輸入信號為r(k)=0.5sin(6.28t),采用位置式PID控制算法設計控制器,其中k。=10,kd=0.5。
輸入正弦曲線和輸出曲線擬合程度比較高,從而證明輸出壓力受輸入信號控制程度比較高。
4結束語
通過MATLAB仿真,驗證了基于位置式PID算法的壓力控制設計是成功的,控制效果可以滿足精度要求不太高的壓力控制場合。控制精度要求比較高的場合,可以考慮采用更先進的PID算法,諸如模糊PID算法、神經PID算法等。
參考文獻
[1]劉金琨.先進PID控制MATLAB仿真[M],北京:電子工業出版社,2007.
[2]王艷賓等.基于PID算法的壓力控制系統綜述[J].首屆株中江科協論壇論文集,2011.
[3]陳斌.基于PID算法的電液比例閥控制系統研究[D].長沙理工大學,2017.
[4]胡永建,一種基于PID算法的氣壓控制技術[J].測控技術,2011(30).
