機器人路徑規劃技術的現狀與發展
2018-05-10 05:10:32徐兵兵郝榮飛
電子技術與軟件工程 2018年24期
徐兵兵 郝榮飛
摘要
隨著智能汽車、智能機器人技術的發展,路徑規劃越來越重要,國內外大量的學者對路徑規劃進行了各種研究,并且取得了許多豐碩成果。而隨著人類對空間和深海探索腳步的加快,移動機器人的研究和開發越來越受到人們的高度重視,本文以移動機器人為例,探討了移動機器人路徑規劃的研究現狀和發展趨勢。
【關鍵詞】路徑規劃 專利申請 機器人
1前言
移動機器人路徑規劃始于20世紀60年代末期,早期的移動機器人路徑規劃主要是靜態環境下,包括柵格的路徑規劃技術、可視圖的路徑規劃技術、拓撲路徑規劃技術和混合路徑規劃技術等,但隨著移動機器人應用領域的擴大和工業環境的變化,要求機器人能適應更加復雜和多變的動態工作環境,特別是根據傳感器探測到的有限范圍內的運動信息進行避障規劃,實現動態環境中的運動和避障,出現采用模糊邏輯的路徑規劃技術、人工勢場的路徑規劃技術、遺傳算法的路徑規劃技術、神經網絡、蟻群算法等,基于實時性、安全性、可達性的更高要求,目前移動機器人路徑規劃技術多在于多傳感器、多種路徑規劃技術的融合。2路徑規劃專利技術申請情況分析
在IPC分類表中,移動機器人路徑規劃涉及的分類號有G05Dl/02、GOIC21/20、GOIC21/34、G05Dl/00、B25J9/16等,涉及的關鍵詞包括移動、機器人、路徑、路線、線路、規劃、robot、mov+、guid+、plan+、path+、rout+、lin+等,截至2017年年底,根據相關分類號和關鍵詞在中英文專利數據庫中進行檢索,獲得以下專利文件數:CNABS文獻量為601,SIPOABS文獻量為1078。
2.1申請情況分析
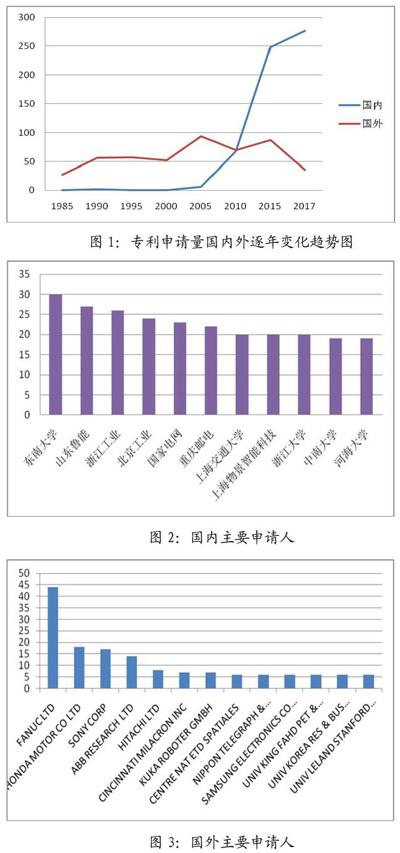
在英文摘要專利數據庫中檢索發現,國外移動機器人路徑規劃技術研究較早,1985年之前關于移動機器人的路徑規劃方法的國外申請量已有27篇,到1990年增加了56篇,1990-2000年申請量較為恒定,2000-2017年申請量呈波浪狀變化,而國內到2000年的申請量只有2篇,2005年申請量為8篇,2005-2010年申請量達到76篇,2010年后申請量急劇陡增,到2015年增加到314篇,2015-2017年專利量申請增速有所下降,但申請量仍處于增長的狀態。具體情況如圖l所示。
2.2主要申請人分析
在英文摘要專利數據庫中檢索發現,我國移動機器人路徑規劃技術研究集中于大學院校,各個院校申請數量較為平均,以東南大學、浙江工業大學申請居多,而后由于人工智能技術發展的需求,以國家電網、山東魯能智能技術有限公司、上海物景智能科技有限公司為代表也相繼投入研究,為移動機器人路徑規劃技術帶來了很大的發展與活力,如圖2所示。而國外申請人以研究公司居多,主要為日本和美國公司,以日本發那科公司、日本本田株式會社、日本索尼、ABB研究公司等為代表,引領機器人路徑規劃技術的發展方向。如圖3所示。
3結論
總之,移動機器人路徑規劃技術取得了豐碩的成果,但每一種方法都有其自身的優點和缺點,沒有任何一種方法可以應用于所有場合。隨著技術的不斷發展,多傳感器、多路徑規劃技術的融合的研究將不斷深入,路徑規劃領域的新的智能算法的研究也將不斷深化,推動移動機器人在其應用領域中發揮更好的作用。
參考文獻
[1]廖紹輝,張連東,機器人路徑規劃技術的現狀與發展趨勢[J].機械工程師,2017.
