基于機器人搖桿齒輪式的設計與平衡探討
2021-10-12 11:05:02徐濱
紅河學院學報 2021年5期
徐 濱
(合肥職業技術學院,合肥 238000)
煤炭開采過程中,礦難慘劇難免發生,因此需要移動機器人進行登陸探測與救援工作[1]。為解決復雜地形的高效率勘探問題,機器人的行走與平衡機構成為現階段的研究熱點[2]。高進可等[3]人利用圓錐齒輪嚙合型差動機構實現了搖桿式四輪煤礦探測機器人的復雜地形勘探,并通過虛擬仿真技術進行樣機的實地試驗。然而,差動平衡機構對于齒輪的彎曲強度的要求較高,否則會出現齒輪滾動,機器人行走不均衡的情況。程志紅等[4]人提出一種對稱的空間連桿式差動平衡機構,具有較大的搖臂擺角范圍和良好的線平均性,能夠很好解決機器人行走的不均衡問題。本文以四輪搖桿式機器人為主體設計了搖桿齒輪式差動平衡機構,著重分析了差動輪系、搖臂軸、殼體的選擇依據,為搖桿齒輪式機器人的實際應用提供參考依據。
一 機器人搖桿齒輪式差動平衡機構總體設計
(一)總體設計要求
本設計為機器人搖桿齒輪式差動平衡機構,如圖1所示,主要參照四輪搖桿式機器人移動系統中的平衡機構進行設計,包含了機器人搖桿差動機構、車體兩側搖桿懸架和獨立驅動輪四個部分。其中,機器人搖桿差動平衡機構裝置的左右兩半軸連接車體兩側的左右搖桿,左右搖桿懸架再與車體的四個驅動輪連接。同時,左右兩側移動系統采用搖臂懸架式共同組成懸架系統,能應對復雜的地形。此外,為了確保機器人能夠順利地越過障礙,行走在不平的路面上,這就要求機器人的底盤距地面要有一定的距離。

圖1 搖桿式四輪機器人的移動系統簡圖
(二)平衡機構總體設計方案
機器人搖桿齒輪式差動平衡機構的差動機構形式采用對稱式行星錐齒輪差速機構。這種差速機構通常被應用在汽車驅動橋上,是一種典型的差速機構。對稱式行星錐齒輪差速機構的差動輪系由左右兩側中心錐齒輪和中間若干行星錐齒輪組成,通常行星錐齒輪數選取2或4個[5]。差速器殼體轉角()和左右兩側搖桿轉角關系:
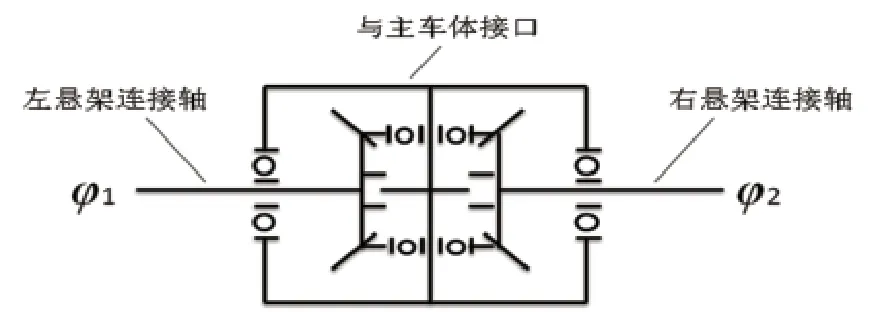
圖2 機器人搖桿差動平衡機構原理圖
為了便于后期維護、保養,將機器人搖桿齒輪式差動平衡機構裝置要被設計相對獨立的部件。機器人搖桿齒輪式差動平衡機構的殼體或底座連接機器人的載物平臺和主體,該裝置的兩側半軸可視為搖臂軸,用連接部件連接著左右兩搖桿懸架。平衡裝置的殼體設計采用中空機構。殼體的空間大小要求,能夠容下差動輪系,還要保證差動輪系在工作的時候,不受殼體干擾。綜上所述,機器人搖桿齒輪式差動平衡機構的總體設計,如圖3所示。

圖3 機器人搖桿齒輪式差動平衡機構總體設計模型
二 平衡機構設計方案分析
(一)平衡機構差動輪系設計
1.平衡機構的齒輪參數選擇
行星齒輪數n:取值大小依據于差動平衡裝置的承載能力。對于車類來說,轎車n取值為2,貨車和越野車等承載能力大的,n取值為4[5],考慮四輪搖桿機器人工作情況,負載能力不是特別大,所以行星齒輪數n的取值為:n=2。
對于任何對稱圓錐行星齒輪式差速器中,為了使兩個或四個行星齒輪與左、右兩半軸齒輪嚙合,這就要求兩半軸齒輪齒數和必須被行星齒輪輪數整除,達不到這一個條件行星齒輪和半軸齒輪就不能裝配。設左半軸齒輪數,右半軸齒輪數,滿足公式[5]:


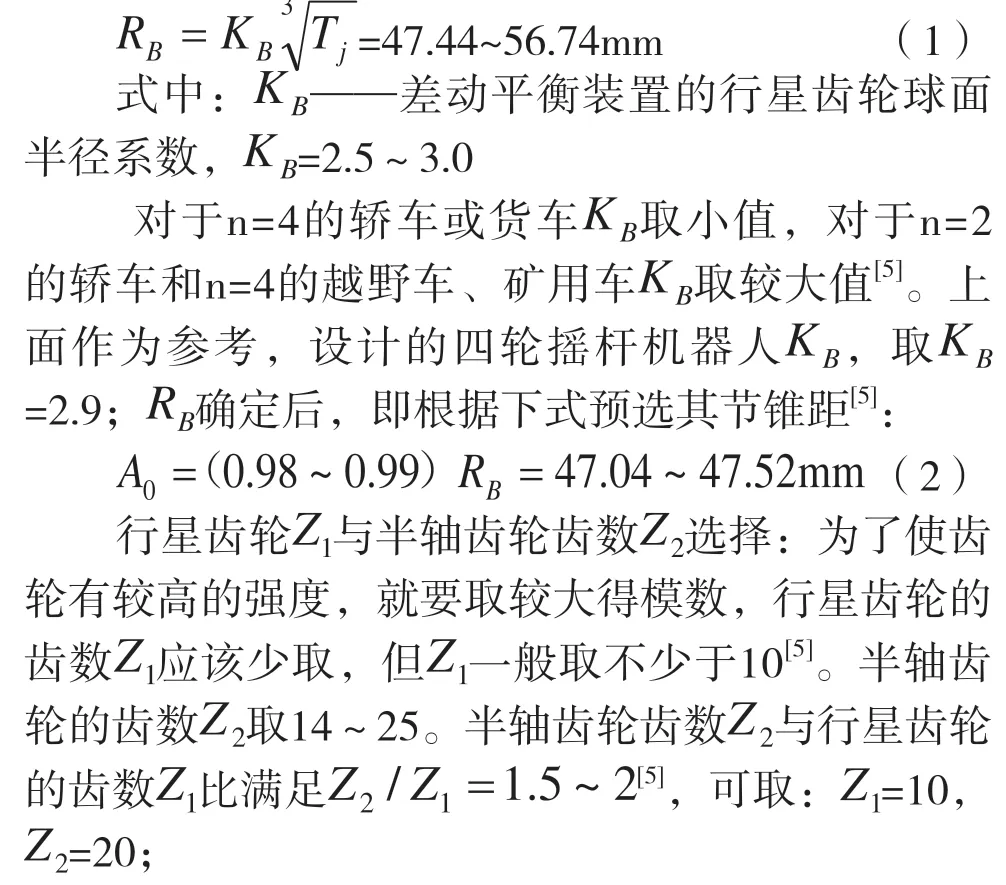
2.平衡機構圓錐齒輪的齒輪強度計算
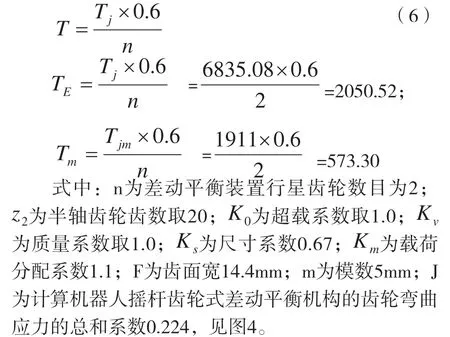
差動平衡裝置的齒輪需要進行彎曲強度計算,而齒輪的疲勞壽命可以不用考慮,主要原因器人搖桿差動平衡裝置的行星齒輪在正常運轉中只作為等臂推力桿使用,當左搖桿懸架轉的角速度與右懸架速度不一樣,則差動平衡裝置半軸中心錐齒輪和行星錐齒輪才會產生滾動。機器人搖桿齒輪式差動平衡機構齒輪的彎曲應力為[6]:

式中:T表示差動平衡裝置的行星齒輪對半軸齒輪的轉矩大小,其單位為:
所以所述機器人搖桿差動平衡機構的齒輪強度滿足要求。
(二)全浮式搖臂軸的設計
借鑒汽車驅動橋的半軸設計機器人搖桿齒輪式差動平衡機構的搖臂軸系。如圖5(a)、(b)是搖臂軸的非浮式和浮式結構。通過比較可以發現:在圖5(b)中一個軸套被加在搖臂軸上搖臂軸,添加的軸套可以和搖臂軸共同旋轉,底座支承形式是通過軸承連接軸套,區別圖5(a)直接作用在搖臂軸上。從設計原理上,圖5(b)彎矩不會在中心搖臂軸上產生。但是在實際中,加工工藝、部件裝配的精度、支撐做的剛度等影響,會產生彎矩,彎矩應為5~70MPa[3]。在四輪搖桿式機器人差動平衡機構中采用浮式搖臂軸。若采取這種結構,對設計的差動平衡機構的半軸有不少優點,第一中心搖臂軸受到彎矩減小,進而彎矩變形也會明顯變輕,最終確保傳動系統存在適當的間隙,機構運動的靈活性得到保證。在設計時若傳動部件受到彎曲變形過大,會對機構的特性產生不好的干擾,情形嚴重的會使機構卡死,造成機器故障。第二,中心搖臂軸受力簡單,只會受到扭轉應力。在設計時設計者會根據實際情況把所許用應力改高,從而使中心搖臂軸(半軸)的半徑變小。第三,差動平衡裝置的半軸(中心搖臂軸)上不會安裝過多的零件,結構簡單,工作安全可靠。第四,套軸部分只受彎矩作用而不會受到扭矩作用,軸套不會扭轉而形變,軸套又與半軸連接,造成半軸不會受到扭矩。采用浮式搖臂軸的結構的不足之處是搖臂軸側與底座支承部分的結構不簡單,安裝時候不方便。比較優缺點,浮式搖臂軸的設計采用優點大于缺點。
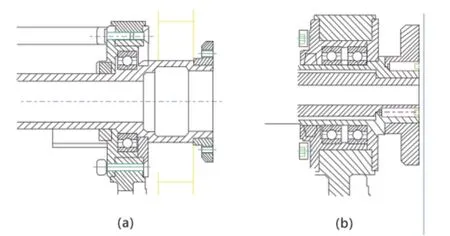
圖5 非浮式和全浮氏搖臂軸連接
(三)平衡機構底座及殼體的設計
支承座架是機器人搖桿差動平衡裝置中主體部件之一,它要承受整個機器人主體的重力,并要向機器人搖桿差動平衡機構傳遞對應扭矩和彎矩。考慮底座的受力情況,底座可用LC4鋁合金作為材料。此材料常常用在承載力大的零件,所以用在四輪機器人搖桿齒輪式差動平衡裝置的底座和殼體是滿足條件的。四輪搖桿式機器人的搖桿差動平衡機構的支承底座的結構設計時,應該包括以下幾個主要的部分:一是應該包含載物平臺;二是主車體的中心部分及差動平衡裝置的底座中間部分安裝一個殼體,殼體是為裝中心錐齒輪和行星齒輪而存在的,及為該平衡裝置的差動錐齒輪系提供正常的工作空間,相當于行星架;三是底座兩側服務于搖臂軸兩個側支承,它們相對底座中心點對稱;這一組測支撐作用向左搖桿右搖桿傳遞載荷。以上三部分為該設計的底座及殼體。同時,把底座及殼體結構設計為組合式結構。又因功能不同,把底座和殼體分開來設計,最終再把兩者組裝起來。
三 結論
本文參照傳統的汽車對稱式齒輪差動平衡裝置的設計方法,確定了四輪機器人的搖桿齒輪式差動平衡機構的總體設計方案,主體采用對稱式圓錐行星齒輪差動平衡裝置和搖臂軸采用全浮式搖臂軸結構。該設計的差動平衡裝置的支撐座設計為底座和殼體兩大部分,差動平衡裝置的結構合理,機器人搖桿齒輪式差動平衡機構的部件設計滿足零件的互換性,滿足機器人移動系統受外部環境需要。