基于渦環柵格法的三體船斜拖水動力數值分析
2018-05-16 09:56:13王鴻東
艦船科學技術 2018年4期
關鍵詞:船舶
王鴻東,易 宏,余 平
(上海交通大學 海洋工程國家重點實驗室,上海 200240)
0 引 言
三體船是近年來發展迅猛的船型,它是一種高性能船,由1個中體和2個片體組成,相比于普通船型,擁有優良的阻力性能和耐波性能,優秀的穩性,較大的甲板面積,以及可以大型化的特點。因此,三體船的應用廣泛,性能優異,在軍民兩用上都具有良好的發展前景[1]。
而對于三體船舶操縱性能的研究,在國內外都甚少。而操縱性能對于三體船舶又十分重要,尤其對三體船在軍事方面的運用十分重要。對于三體船舶操縱性能的研究,其關鍵在于水動力系數的確定,而想要得到精確的水動力系數,就需要精確計算三體船舶在斜航、旋臂等不同運動狀態下的受力情況。在國內外對于水動力導數的求解方法,主要有經驗公式、船模試驗以及CFD軟件以及勢流理論求解的方法。
早在1936年Bollay[2]已將二維的渦格法運用于較少展弦比機翼升力的計算,有著良好的效果。近年來,一些學者將渦格法運用于飛行器、船舶、海洋平臺等流體力學相關領域的操縱性分析。Minu Jeona和Seungmin Lee[3]采用渦格法分析了海上浮動式風力渦輪機在傾斜試驗中的操縱性問題。J Gardiner和NA Razak等[4]利用渦格法對鳥類飛行過程中環翼流場進行仿真分析。Sanghyuk Park[5]將渦格法應用于固定翼無人機操縱性分析,并考慮了螺旋槳法向力對舵相應的影響,使模型仿真與飛行試驗結果較好地吻合。陳材侃等[6]考慮到非線性的自由液面邊界條件,用下潛渦格法求解了水翼繞流問題。詹金林、盧曉平等[7–8]對渦格法在船舶橫向力以及轉首力矩計算中的運用進行了研究。
本文運用勢流方法對三體船操縱運動中的斜航運動進行數值模擬[9–10]。由于傳統源匯模型的誘導速度沿面元的切向連續法相不連續[11],對于有升力物體的模擬在滿足定解條件的情況下,無法體現升力面兩側的速度差,而恰恰渦環(或偶極)單元的誘導速度沿法向連續而切向不連續[12]。因此,本文將三體船視作3個有升力機翼,在船體表面布置渦環,采用對疊模的方法,忽略自由面的影響,通過渦環之間的相互誘導速度以及物面不可穿透條件,求解各個渦環的強度,進而得到各個分布點處的速度、壓強以及船體的受力情況。并通過計算結果求得相應的水動力系數Yv,Yvvv,Nv,Nvvv。
1 數學模型
1.1 坐標系
采用如圖1所示的右手坐標系,坐標原點O位于船中,X軸由船首指向船尾,Y軸由船左舷指向右舷,Z軸豎直向上。側體分布于主體兩側,兩側側體中心位置對于主體中心位置在X方向的距離同為a,在Y方向的距離同為b。
1.2 控制方程以及邊界條件
假定均勻來流速度為。根據勢流理論,流場存在速度勢Φ,由均勻來流的速度勢和擾動速度勢φ構成,即:
不計自由面興波,φ應該滿足以下定解條件:
對于有升力模型,還應滿足:
其中,和分別為尾緣處尾渦面兩側的壓力。
1.3 方程的離散與求解
采用在物面和尾渦面上布置渦環的方法進行數值計算。流場中任意一點p的速度勢為:
離散處理后得:
關于式(5)兩邊求導,可得p點處的誘導速度為:
式中:右邊第1項和第2項分別為物面上的渦環單元和尾渦面上的馬蹄渦對p點的誘導速度;lj和lk分別為物面和尾渦面上面元的周界;mj和mk分別為渦環lj和lk的強度。渦環走向按由物面外法線方向按右手定則確定。
如果要在尾渦面上滿足正負方向壓強相等的Kutta條件,則需要不斷迭代求解得到非線性的尾渦面以滿足Kutta條件[13],而斜拖運動中船體漂角一般較小,非線性的影響也較小,因此本文參考了文獻[14]對Kutta條件進行簡化,尾渦面方向與來流方向一致,因為尾渦面上下的壓力是連續的,而尾渦面又平行于來流方向,所以尾渦面的每一縱向條帶各單元的渦環強度應該相等。如圖2所示,這些渦環合在一起相當于一馬蹄渦,其尾渦部分平行于來流方向,附著渦部分與物體后緣重合。
根據后緣的Kutta條件,在物體后緣不能有集中渦,于是馬蹄渦的強度mw與相鄰物面單元上的渦環強度之間有如下關系式:
流場內任意點p處擾動流場可以寫成:
其中:N為物面上的面元總數;為物面任意單元j對于場點p的誘導速度;物面單元編號為j,而
其中,pi為場點趨近于某一物面控制點i,。
式(9)可簡寫為:
其中:
式中:為渦環的影響系數,為馬蹄渦的影響系數。此外,,ni為控制點pi處外法線方向的單位矢量。由式(10)建立N×N的線性代數方程組可以解得渦強mj。采用薄物體的壓力分布計算方法。物面上分布的面偶對其上任一點qi的誘導速度為:
式中:右邊第2項為0,第3項之前已求得,對于第1項,解析方法較難計算,本文采用工程上常用的計算方法[14],令,用 m1,m2,m3分別表示物面某一單元處渦強以及單元縱向前方、垂向上方單元處渦強,通過前述方程組求解得到渦強后,則m1,m2,m3為已知量,即可計算:
即
記,于是聯立上式可以解得h1和h2,進而得到式(14)第1項。解得各分布點速度后,可得由伯努利方程到物面的壓力分布,再由可控制點的向徑pi,由式(15)和式(16)求得船體受到的橫向水動力和轉首水動力矩:
2 三體船斜航數值模擬及計算
選取三體Wigley船型為例,對三體船斜航運動進行數值模擬,進而說明算法的有效性[15]。船型函數表達式為:
取主體水線長L=3 m,主體水線寬B=0.3 m,主體吃水z=0.2 m,側體按主體的0.4倍進行縮放,側體縱向間距a=0.9 m,橫向間距b=0.5 m。對其進行面網格劃分,將主體水線劃分40份,吃水深度劃分5份,側體水線劃分16份,吃水深度劃分2份,共劃分696個四邊形網格,采用正弦分布對船體網格進行劃分,如圖3所示。
由程序計算可得,在航速為1.625 m/s時斜航運動的受力如表1所示。
計算結果與商業軟件Star-CCM+計算結果進行對比,如圖4所示。
水動力系數對比如表2所示。
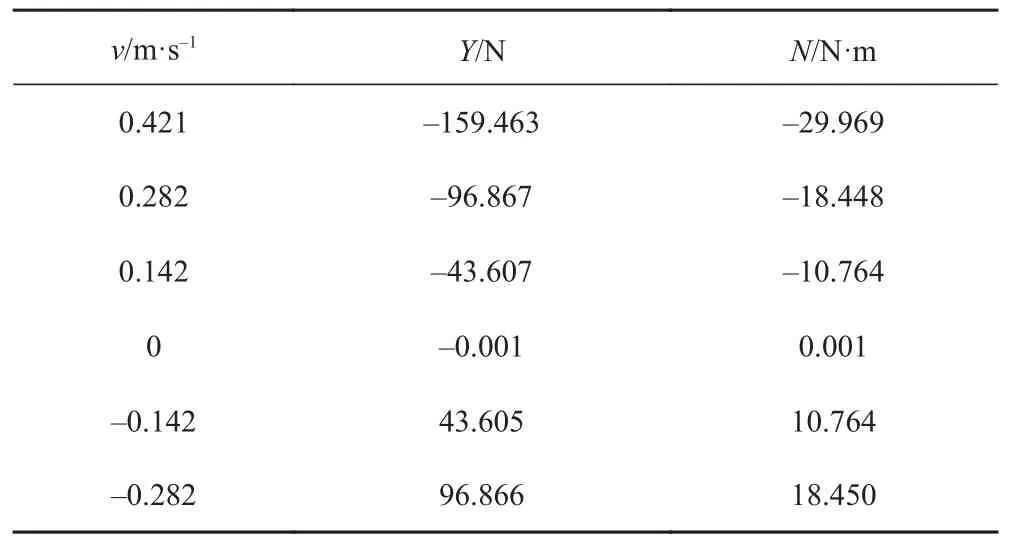
表1 三體Wigley斜航受力Tab. 1 Oblique towing force of wigley trimaran
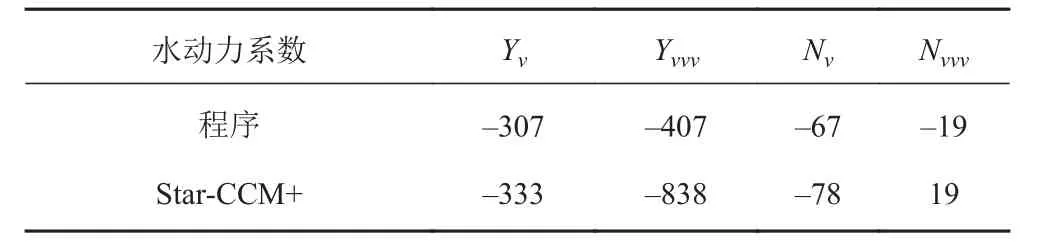
表2 水動力系數Tab. 2 Hydrodynamic Derivative
由計算結果可知,在漂角較小的情況下,程序計算結果與商業軟件計算結果相符,但是由于對尾渦面進行了較小漂角下的線性尾渦面假設,因此隨著漂角的不斷增大,程序計算結果尤其是橫向力與商業軟件計算結果的差距增大,這與實際相符。由于轉首力矩隨著漂角的增大,其增幅相對較小,因此模擬較準確,而橫向力的增大則非線性程度較大,因此主要的計算誤差也體現在Yvvv上。由于15°的漂角已足以滿足工程計算的要求,因此認為對尾渦面的假設可行。
對三體Wigley船型分別采用了正弦分布網格劃分。由于船體的受力較變化較大的部位主要在船首尾處,因此正弦網格分布可以在首尾處更好地反應形狀變化以及得出更精確的壓力分布。也說明對于渦環柵格法的使用,如何正確計算出渦強的分布,對最終壓強分布的計算,以及最終橫向力以及轉首力矩結果的精度起著至關重要的作用。
3 結 語
利用渦格法對于三體船斜航運動的數值模擬,并通過結果回歸得到斜拖運動水動力導數的方法可行。由于船體實際操縱運動漂角并不大,因此對于尾渦面的線性假設,在較小漂角情況下適用。但是由于忽略了尾渦面的非線性以及自由面的影響,隨著漂角即橫向速度的不斷增大,受力體現出的弱非線性也更加明顯,誤差也會隨之增大,這符合實際情況。
參考文獻:
[ 1 ]盧曉平, 酈云, 董祖舜. 高速三體船研究綜述[J]. 海軍工程大學學報, 2005, 17 (2): 43–48.LU Xiao-ping, LI Yun, DONG Zu-shun. A research summary on high speed trimaran [J]. Journal of Naval University of Engineering, 2005, 17 (2): 43–48.
[ 2 ]BOLLAY W A. Non-linear wing theory and its application to rectangular wings of small aspect ratio [C]// ZAMM, 1937.
[ 3 ]JEON M, LEE S, LEE S. Unsteady aerodynamics of offshore floating wind turbines in platform pitching motion using vortex lattice method [J]. Renewable Energy, 2014, 65(5): 207–212.
[ 4 ]GARDINER J, NORIZHAM A R, DIMITRIADIS G, et al.Simulation of bird wing flapping using the unsteady vortex lattice method [C]// International Forum on Aeroelasticity and Structural Dynamics, IFASD 2013.
[ 5 ]PARK S. Modeling with vortex lattice method and frequency sweep flight test for a fixed-wing UAV[J]. Control Engineering Practice, 2013, 21(12): 1767–1775.
[ 6 ]陳材侃, 劉華. 解三維水翼繞流的下潛渦環柵格法[J]. 船舶力學, 2005, 9: 41–45.CHEN Cai-kan, LIU Hua. A submerged vortex lattice method for calculation of the flow around a three-dimension hydrofoil[J]. Journal of Ship Mechanics, 2005, 9: 41–45.
[ 7 ]詹金林, 盧曉平, 李光磊. 三體船操縱性水動力的勢流理論計算[J]. 哈爾濱工程大學學報, 2012, 33: 642–647.ZHAN Jin-lin, LU Xiao-ping, LI Guang-lei. Calculation of trimaran’s maneuverability hydrodynamics by the potential flow theory [J]. Journal of Harbin Engineering University,2012, 33: 642–647.
[ 8 ]詹金林, 盧曉平, 陳陽, 等. 三體船斜航流場與操縱性位置導數面元法分析[J]. 華中科技大學學報: (自然科學版), 2012,40: 77–81.ZHAN Jin-lin, LU Xiao-ping, CHEN Yang, et al. Analysis of flow field and manoeuvering position of trimarans with driftangle by panel method [J]. Journal of Huazhong University of Science and Technology (Natural Sciencce Edition), 2012, 40:77–81.
[ 9 ]王獻孚. 船舶計算流體力學[M]. 上海: 上海交通大學出版社,1992.
[10]蘇玉民, 黃勝. 船舶螺旋槳理論[M]. 哈爾濱: 哈爾濱工程大學出版社, 2003: 159–180.
[11]王國強, 楊建民. 任意三維物體繞流的數值計算方法[J]. 水動力學研究與進展, 1987, 2: 94–109.WANG Guo-qiang, YANG Jian-min. A new numerical method for calculation of potential flow about arbitrary threedemensional bodies [J]. Advances in Hydrodynamics, 1987, 2:94–109.
[12]陳慶任, 葉恒奎, 楊向暉, 等. 近自由面三維水翼的水動力分析及試驗研究[J]. 船舶力學, 2011, 15: 1115–1120.CHEN Qing-ren, YE Heng-kui, YANG Xiang-hui, et al.Hydrodynamic analysis of 3-D hydrofoil under free surface and the study on experiment [J]. Journal of Ship Mechanics,2011, 15: 1115–1120.
[13]陳慶任, 葉恒奎, 管延敏. 近自由面三維水翼的水動力時域分析[J]. 船舶力學, 2010, 14: 1331–1339.CHEN Qing-ren, YE Heng-kui, GUAN Yan-min. Hydrodynamic analysis of 3-D hydrofoil under free surface and the study on experiment [J]. Journal of Ship Mechanics, 2010, 14:1331–1339.
[14]王獻孚. 船用翼理論[M]. 北京: 國防工業出版社, 1998:127–153.
[15]戴遺山, 段文洋. 船舶在波浪中運動的勢流理論[M]. 北京:國防工業出版社, 2008: 30–60.
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:08:26
艦船科學技術(2022年14期)2022-09-22 03:07:40
機械工業標準化與質量(2022年6期)2022-08-12 02:07:42
艦船科學技術(2022年2期)2022-03-29 01:12:44
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
軍工文化(2017年12期)2017-07-17 06:08:06
中國船檢(2017年3期)2017-05-18 11:33:09
船海工程(2015年4期)2016-01-05 15:53:30
