基于微小衛星編隊的聚光操控技術*
2018-05-19 03:23:14康國華楊炳輝
航天控制 2018年2期
康國華 楊炳輝 劉 瑤 馬 云
南京航空航天大學微小衛星研究中心,南京 210000
微小衛星憑借部署靈活、成本低等優勢近年來在空間攻防領域得到重視,以微小衛星為載體的天基微波干擾、天基化學物質噴灑和成像遮擋等軟殺傷手段得到研究[1-2]。相比動能武器這樣的硬殺傷,軟殺傷可避免產生空間碎片,并且效果是可逆的,為空間攻防態勢的升級留有余地。
但是現有的軟殺傷主要是使衛星表面載荷無法正常工作,或者對于衛星的通訊定位等做出干擾,無法真正對于衛星的核心部件包括傳感器、星載計算機等造成破壞,能夠造成的實際效果比較有限。而且隨著技術進步,衛星的位姿控制系統與通訊系統也在升級,出現了許多新型的反干擾技術[3-4],加大了傳統軟殺傷手段的實現難度,也降低了任務執行的成功率。因此為了發展“制太空權”需要設計一種抗干擾性強而且可以對于目標衛星的核心部件進行有效殺傷的空間攻防手段。
基于以上問題,提出一種基于微小衛星編隊的軟殺傷手段,設計衛星編隊并對編隊內衛星進行協同控制,聚集太陽光到目標衛星上,實現對目標星的熱干擾。由于太空中沒有大氣層的干擾,太陽光具有很高的能量,每平方米的光能可達1367W[5]。當衛星編隊將太陽光匯聚到目標表面時,就會導致星表溫度上升,星內部元器件過熱,對目標衛星造成熱干擾,甚至當溫度上升至衛星外殼的熔點時,會破壞衛星外殼,達到對于目標的熱摧毀。
根據微小衛星對空間目標聚光的任務要求,分析了方案的可行性,對編隊構型進行了分析,對系統中單顆衛星的位姿控制進行了設計。
1 聚光編隊的方案設計與構型分析
1.1 聚光方案設計
沙漠中塔式太陽能電站(圖1和2所示)在工作時能夠聚集大量的太陽能,目前塔式太陽能電站的功率已經可以達到MW級別[6-7]。受到塔式太陽能電站的啟發,在軌微小衛星編隊的工作原理如圖3所示:
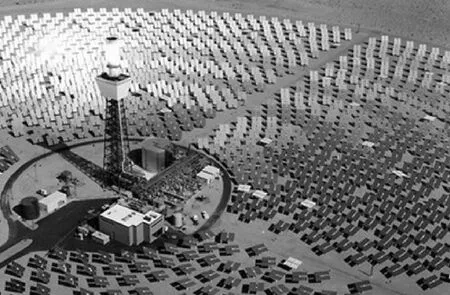
圖1 塔式太陽能發電站
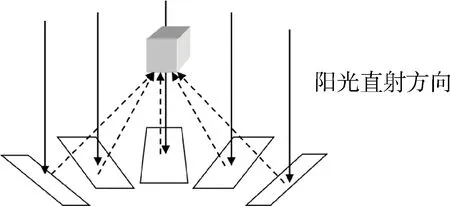
圖2 塔式太陽能發電站工作原理
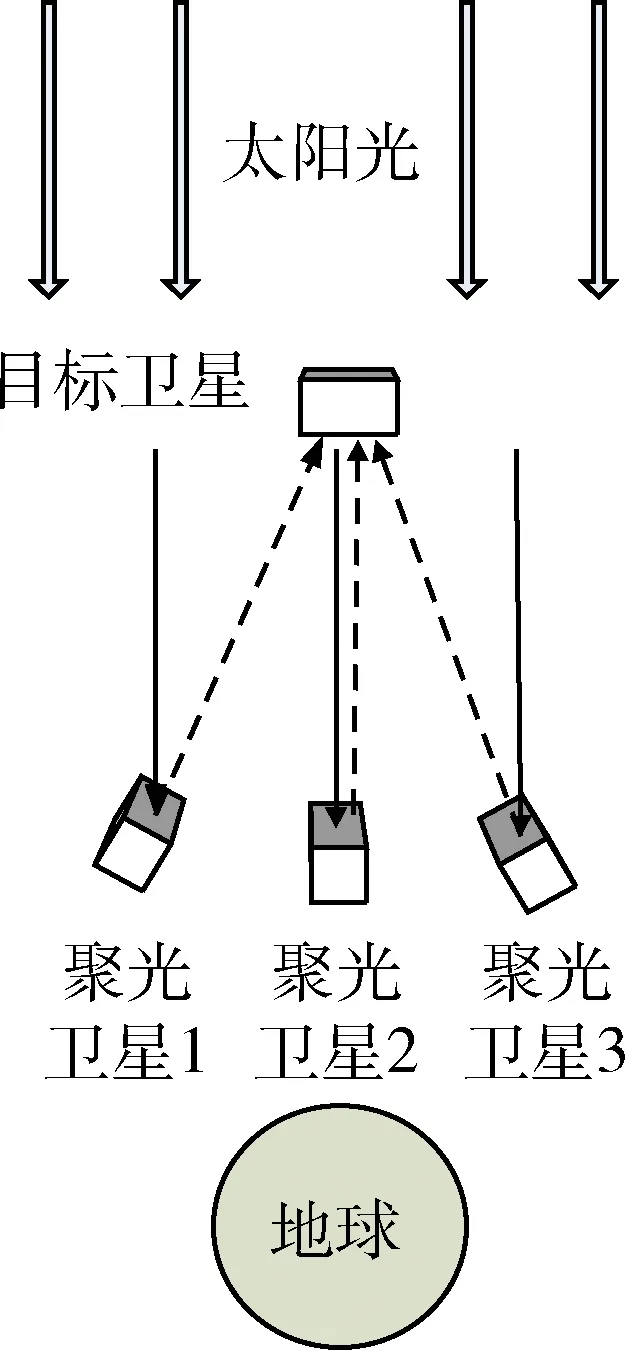
圖3 微小衛星聚光編隊示意圖
微小衛星聚光編隊將單個衛星表面反射的太陽光匯聚在目標上,造成目標的局部升溫甚至外殼熔化,達到軟殺傷的目的。
1.2 聚光效果分析
假設每顆衛星搭載0.5m×0.5m的ABS電鍍鋁反光鏡(反射率94%[8]),衛星編隊由15顆微小衛星構成,反射的光束對準目標衛星表面,假設目標星表面材料為鋁,光照區域對應質量為5kg,其初始溫度為20℃[9]。由于編隊相對于目標的距離遠大于編隊內衛星間的距離,因此計算能量時假設每一顆衛星都能做到對于陽光的全反射。經計算,保持聚光80s可以使衛星表面升高到113℃,相關文獻表明,衛星內電子集成器件的可靠性對溫度十分敏感,過高的溫度會大大降低電子器件的可靠性,器件溫度在70℃~80℃水平上每增加1℃,可靠性就會下降5%[10],可見該系統80s的聚光可以大幅度降低星載電子器件的可靠性,完成對于目標衛星的熱干擾;保持聚光552s即可將鋁板加熱到660℃,達到鋁的熔點[11],使衛星外殼熔化,完成對于目標衛星的熱摧毀。
1.3 編隊構型分析
本項目的編隊設計思想是保持編隊穩定的同時提升繞飛衛星的有效反射面積,即聚光衛星正對太陽的面積達到最大。為了達到這一目的,我們將編隊衛星環繞地球的運動和目標衛星之間的相對運動結合,分析發現當編隊內衛星與目標在同一軌道面上且可以構成圖4所示的編隊時可以有效地增大有效反射面積。圖4中采用軌道坐標系描述編隊衛星與目標衛星的相對運動,其中原點為一個在特定軌道上運行的質點,X軸指向地球失徑方向,Y軸指向軌道正方向。θ1為相對于起始點,軌道坐標系原點轉過的角度,θ2為目標衛星與一顆編隊衛星的連線與軌道坐標系Y軸負方向的夾角,θ3是太陽光矢量與軌道坐標系Y軸負方向的夾角,不失一般性,假設衛星編隊與目標衛星位于近地軌道,目標衛星軌道參數為:a=7135.6km,e=0.00138,i=98.42°,ω=90°,Ω=270°,M=270°,軌道周期為5998.7s[12]。
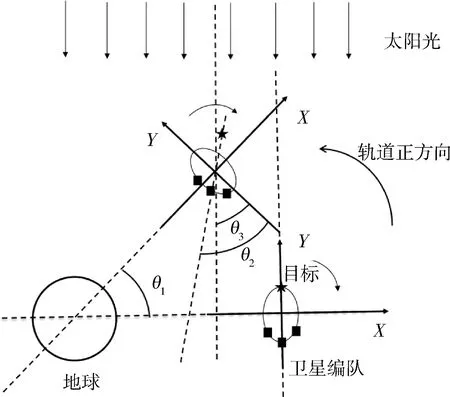
圖4 目標衛星與編隊衛星的運動軌跡
初始狀態下,目標與編隊內一顆衛星的連線與太陽光矢量平行,運動一段時間之后,根據CW方程可知θ2=π/2-arctan(cot(nt-π/2)/2),目標與該衛星的連線和太陽光矢量的夾角φ=θ2-θ3曲線如圖5所示,偏差角的絕對值最大為19.47°。易知,夾角φ越小證明編隊內衛星的聚光面正對太陽的面積越大,由于編隊相對于目標的距離遠大于編隊內衛星間的距離,因此可以通過編隊衛星軌道參數的調節使得編隊內的每一顆衛星在圖4內起始狀態的夾角φ在0°左右。變化率φ1的曲線如圖6,變化率的絕對值最大為0.03(°)/s,因此姿態控制算法的主要指標為控制精度。
前文涉及的CW方程描述的是一種理想狀態下的運動,在實際應用中會發生漂移,即在一定時間后編隊內衛星的相對運動軌跡不再是一個封閉的橢圓,因此在編隊運行過程中也需要對編隊衛星的軌道進行微調。結合前文的分析,為了保證聚光效率,以及編隊的穩定,需要設計一種針對單顆星的高精度姿軌耦合控制,保證編隊衛星可以將光能聚集在目標衛星上,并在調整衛星姿態的同時對軌道進行調整。
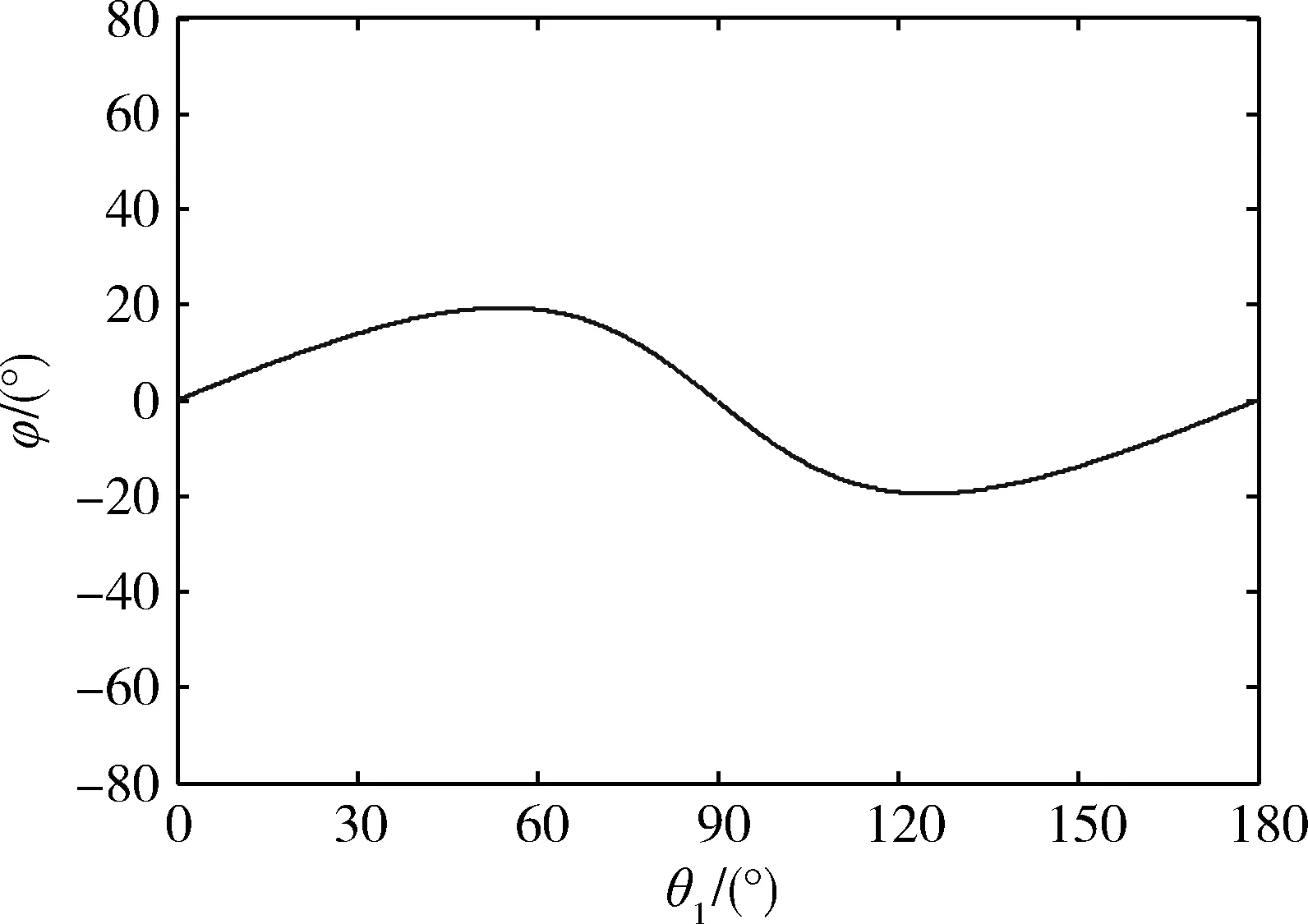
圖5 夾角變化曲線
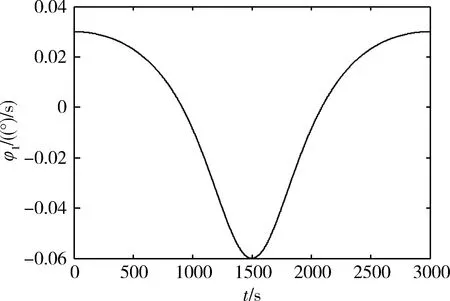
圖6 夾角變化率曲線
2 衛星姿軌控指標分析與算法設計
分析可知,要實現有效編隊聚光操控,單顆衛星的精確姿軌控制是關鍵。考慮到單顆衛星存在的非線性、系統參數不確定性和頻繁擾動等因素,二階滑模控制都可以有效克服,提高衛星位姿控制精度和穩定度,而且物理實現較為簡單[14]。
2.1 衛星姿軌控參數分析
2.2 衛星姿軌耦合二階滑模控制
根據任務需求,本文采用文獻[16]提出的衛星姿軌耦合動力學方程:
(1)
式中:

考慮滑模面:
(2)
式中:

U=N(Ueq+Un)
(3)
式中:
證明:聯立式(1)和(2)可得
(4)
選取如下所示的Lyapunov函數
(5)
易知,V(0)=0,V>0。對式(4)求一階導數可得:



由Lyapunov穩定性理論可知σ,S均將漸進收斂至0。進一步可知,系統狀態偏差e1,e2最終一致有界穩定[17]。
滑模控制率的一致有界穩定表明該算法可以有效地降低外部干擾帶來的誤差,對非線性、系統參數不確定性和頻繁擾動等因素具有較好的抑制作用,可提升衛星姿軌控制的精度。
3 仿真分析
假設衛星慣量J=diag(1.6,1.5,1.8)/(kg·m2)外部干擾力矩為Td=0.01×[sint;cost;sin(0.5t)] (N·m),干擾加速度Ud=0.01×[sint;cost;sin(0.5t)](m/s2),
衛星姿態用MRP(修正羅德里格斯參數)表示,衛星的初始姿態狀態量為σ(0)=[0.3,0.2,0.1]T,期望姿態狀態量σd=[0,0,0]T,衛星本體系下目標點與衛星的初始相對位置r0=[0.4,0.5,0.3]T(m),期望相對位置rd=[0,0,0]T(m),初始角速ω0=[0,0,0]T(rad/s),期望角速度ωd=[0,0,0]T(rad/s),參數如表1所示。
按表1所示參數仿真200s,姿態曲線如圖7所示,0.01°對應的MRP值為4.36×10-5。
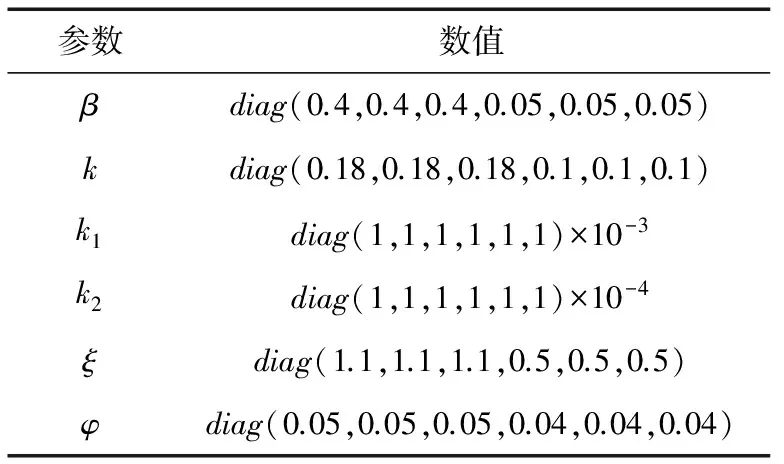
表1 控制器參數
相對位置變化曲線如圖8所示,控制加速度和控制力矩的曲線如圖9所示。
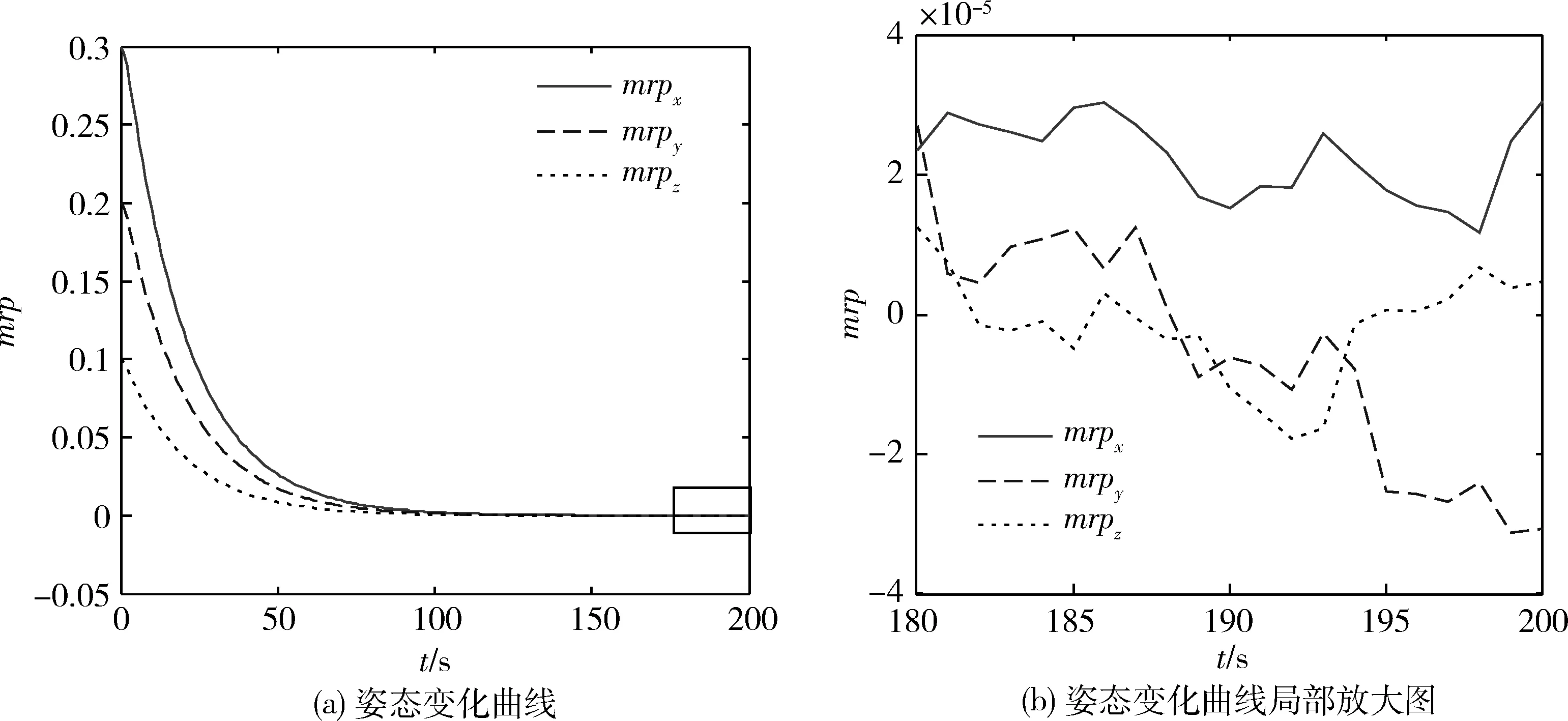
圖7 姿態變化曲線
從圖7和圖8可以看出,被控衛星應用該算法可以在短時間使得姿態和相對位置達到期望的值并保持穩定,而且從局部放大圖來看,姿態和相對位置的控制精度滿足指標要求。從圖9可以看出在軌道和姿態的調整過程中需要的控制加速度和控制力矩可以在微小衛星平臺實現。
結合前文衛星姿軌控參數的分析,該算法可以滿足編隊內衛星對于軌道和姿態控制精度的要求[18-19]。
4 結論
為了解決現有的空間軟殺傷手段的缺陷,提高執行任務的能力及效率,本文提出了一種基于微小衛星編隊利用太陽光進行空間軟殺傷的手段。給出了編隊的構型,并對該編隊構型的聚光效率進行了分析;為了控制編隊內的單顆衛星將光能聚集到目標上,提出了一種基于衛星本體坐標系的姿軌耦合二階滑模控制。結果表明,本文設計的編隊構型穩定、聚光效率高,設計的控制算法精度滿足要求,可以實現對于目標衛星穩定的聚光。
參 考 文 獻
[1] 喬毅, 李曉宇, 趙田. 小衛星技術典型軍事應用分析[J]. 國外電子測量技術, 2017, 36(3):47-50. (Qiao Yi, Li Xiaoyu, Zhao Tian. Analysis on Typical Military Application of Small Satellite [J]. Foreign Electronic Measurement Technology, 2017, 36(3):47-50.)
[2] 林來興, 張小琳. 迎接“軌道革命”——微小衛星的飛速發展[J]. 航天器工程, 2016, 25(2):97-105. (Lin Laixing, Zhang Xiaolin. To Meet “Revolutionin Orbit”:Rapid Development of Micro-small Satellite[J].Spacecraft Engineering, 2016, 25(2):97-105.)
[3] 程路, 姜長生, 都延麗,等. 基于滑模干擾觀測器的近空間飛行器非線性廣義預測控制[J]. 宇航學報, 2010, 31(2):423-431. (Cheng Lu, Jiang Changsheng, Du Yanli, et al. The Research of SMDO based NGPC Method for NSV Control System [J]. Journal of Astronautics, 2010, 31(2):423-431)
[4] 王青, 后德龍, 陳彬,等. 飛行器切換多胞系統抗干擾控制[J]. 宇航學報, 2015, 36(2):186-195. (Wang Qing, Hou Delong, Chen Bin, et al. Disturbance Attenuation Control for Flight Vehicle Switched Polytopic System [J]. Journal of Astronautics, 2015, 36(2):186-195.)
[5] 王紹武. 太陽常數[J]. 氣候變化研究進展,2009,5(01):61-62. (Wang Shaowu. Solar Constant [J]. Advances in Climate Change Research, 2009,5(01):61-62.)
[6] 徐惠. 塔式太陽能聚熱發電站建設關鍵技術研究與應用[J]. 安裝, 2017(10).
[7] 袁建麗,韓巍,金紅光,張清峰. 新型塔式太陽能熱發電系統集成研究[J]. 中國電機工程學報,2010,29:115-121. (Yuan Jianli, Han Wei, Jin Hongguang,et al. Research on System Integration of a Novel Solar Tower Thermal Power Plant [J]. Proceedings of the CSEE, 2010,29:115-121.)
[8] 葉源. 利用磁過濾陰極真空弧沉積技術制備太陽能高反射率薄膜材料[D]. 華南理工大學, 2014. (Ye Yuan. Application of Filtered Cathode Vapor arc Deposition Technique in Preparation of Solar Reflective Film Materials with High Reflectance [D]. South China University of Technology, 2014.)
[9] 劉方軍, 李路明, 李雙壽. 微小衛星結構材料選取初探[J]. 航天制造技術, 2003(4):48-52.
[10] 潘增富. 微小衛星熱控關鍵技術研究[J]. 航天器工程, 2007, 16(2):16-21. (Pan Zengfu. Study on Key Thermal Control Technology for Micro-satellite [J]. Spacecraft Engineering, 2007, 16(2):16-21.)
[11] 任志俊 薛國祥. 實用金屬材料手冊(精)[M]. 江蘇科技出版社, 2007.
[12] 孟云鶴. 近地軌道航天器編隊飛行控制與應用研究[D]. 國防科學技術大學, 2006. (Meng Yunhe. Reaearch on Control and Application of Leo Spacecraft Formation Flying [D]. National University of Defense Technolog, 2006.)
[13] 姜宇, 李恒年, 潘立公,等. 衛星編隊飛行相對繞飛控制策略[J]. 航天控制, 2014, 32(1):55-62. (Jiang Yu, Li Hengnian, Pan Ligong,et al.Relative Fly-Around Control Strategy for Satellite Formation Flying[J]. Aerospace Control, 2014, 32(1):55-62.)
[14] 劉海東, 包為民, 李惠峰. 基于伺服機構飽和抑制的模糊滑模控制方法[J]. 航天控制, 2017,35(1):3-7(Liu Haidong,Bao Weimin,Li Huifeng. Fuzzy Sliding Mode Control Method Based on Saturation Restrain of Servo Mechanism[J]. Aerospace Control, 2017,35(1):3-7.)
[15] 詹亞鋒, 馬正新, 曹志剛. 現代微小衛星技術及發展趨勢[J]. 電子學報, 2000, 28(7):102-106. (Zhan Yafeng, Ma Zhengxin, Cao Zhigang. Technology of Modern Micro Satellite and Its Development Direction [J]. Acta Electronica Sinica, 2000, 28(7):102-106.)
[16] 鐵鈺嘉,楊偉,岳曉奎. 航天器姿軌耦合非線性同步控制[J]. 計算機仿真,2012, (03):126-131. (Tie Yujia, Yang Wei, Qiu Xiaokui. Spacecraft Attitude and Orbit Coupled Nonlinear Synchronization Control [J]. Computer Simulation, 2017, 36(3):47-50.)
[17] 胡壽松. 自動控制原理(第四版)[M]. 科學出版社, 2001.
[18] 王志遠. 基于皮衛星的衛星動量輪研究[D].浙江大學,2013. (Wang Zhiyuan. Research of Micro Momentum Wheel Based on Pico-Satellite [D]. Zhejiang University, 2013.)
[19] 吳漢基,蔣遠大,張志遠,王魯峰. 微小衛星的在軌推進技術[J]. 火箭推進,2006,(03):40-43,62. (Wu Hanji, Jiang Yuanda, Zhang Zhiyuan, Wang Lufeng. On-board Propulsion Technologies for Micro/Minisatellites [J]. Journal of Rocket Propulsion, 2006,(03):40-43,62.)