INS/GNSS緊組合導航系統故障探測與隔離的改進研究
2018-05-19 03:23:18邵夢晗熊寸平高曉穎
航天控制 2018年2期
邵夢晗 熊寸平 程 風 高曉穎
1.北京航天自動控制研究所,北京 100854 2.宇航智能控制技術國家級重點實驗室,北京 100854 3.武漢大學衛星導航定位技術研究中心,武漢 430079
INS/GNSS組合導航是提高導航精度的一種常用手段,已在工程中廣泛使用。按照組合方式的不同,分為松組合、緊組合和深組合。目前,基于位置和速度的松組合導航系統已經相當成熟,它因計算量小、實現容易而在民用、軍用領域都得到廣泛使用。但是松組合也有不可避免的缺陷:GNSS提供的用于組合的信息是經過內部解算得到的位置、速度信息,它們是時間相關的,導致濾波的穩定性較差;并且必須要求可見星數目不少于4顆。松組合本質是將GNSS接收機與可見星的相對位置信息轉換為地理坐標系下的位置信息,然后與慣性導航的結果作差構成觀測值;緊組合則是直接利用GNSS原始觀測值:偽距和偽距率,將慣性導航解算的地理坐標系下的位置信息轉換為與可見星之間的相對距離信息,再與GNSS提供的偽距和偽距率作差構成組合導航的觀測值。因此,緊組合能夠在松組合不可用的條件下使用,尤其是當可見星數目少于4顆的情況下依然能進行,從而提高組合導航系統的可靠性和精度。
容錯組合導航系統是目前組合導航系統的發展方向之一,這些系統具有故障檢測、診斷、隔離和系統重構的功能[1]。在設計的容錯方案中,對于以慣性導航為主體的組合導航系統,一般采用冗余慣性傳感器的結構來提高慣性導航系統的可靠性。因此,GNSS組合導航系統的故障判斷準則是:若系統INS/GNSS故障,則判定導航系統GNSS故障[1]。INS/GNSS系統故障探測的關鍵是對GNSS提供的信息的正確性判別。在緊組合中主要是對GNSS接收機提供的偽距和偽距率進行質量檢測。目前的容錯算法設計都是基于整個組合系統,對INS/GNSS濾波后的新息或結果誤差進行檢驗[2-4],該方法必須在組合卡爾曼濾波計算后進行,一定程度上浪費了大量的時間和內存。針對于此,基于INS/GNSS故障判斷準則,本文提出一種容錯INS/GNSS緊組合結構:在進行組合導航濾波計算前,先單獨對GNSS系統進行故障星檢測,即偽距和偽距率可信性檢測,隔離故障星,確定可靠的偽距、偽距率觀測值組合后,再聯合INS進行卡爾曼濾波解算,得到準確的定位結果。
容錯設計的核心是進行系統自監控,實時地故障檢測與隔離(Fault Detection and Isolation, FDI)。一旦檢測到故障就必須對故障進行隔離,最后通過系統信息重構使整體不致因故障而失效。目前,廣泛采用的一種故障探測方法是基于數理統計的χ2檢驗法,它是利用對卡爾曼濾波器的新息構造統計檢驗量,進行二元假設檢驗。文獻[4]提出一種殘差χ2檢驗法與雙狀態χ2檢驗法并行工作且共用一個卡爾曼濾波器的方法,有效解決了單一χ2檢驗法的缺陷,該方法僅能實時確定一組觀測值的有效性,不能確定故障的發生位置和具體原因。本文在傳統χ2檢驗法的基礎上,將w-檢測法與χ2檢驗法結合進行故障探測與定位,并通過實測數據仿真,驗證了探測的精確性。確定故障星后,對其偽距和偽距率信息進行剔除,利用剩余的衛星信息進行系統重構,能有效提高系統的可靠性和完備性。
1 INS/GNSS緊組合故障檢測與隔離結構設計
本文提出的INS/GNSS緊組合導航系統的故障探測結構設計如圖1所示。
在傳統的緊組合導航系統中,添加了故障星探測、識別與剔除模塊,具體過程是:首先對GNSS原始偽距、偽距率觀測信息進行故障探測,識別和剔除掉故障衛星,得到正確的偽距、偽距率觀測信息,然后再與INS組合,進行卡爾曼濾波解算。采取這樣的算法,對GNSS原始觀測值可靠性進行預判斷,能夠有效保證后續濾波計算結果可靠。同時,結構簡單,系統耦合影響較小,能準確確定GNSS引起的故障位置,隔離錯誤觀測信息。
2 改進故障探測檢驗法原理與應用
2.1 w-檢測法與χ2檢驗法結合的故障識別算法
傳統的殘差χ2檢驗法只能用來確定INS/GNSS系統某一歷元的觀測值中是否存在粗差,即是否存在故障星,若存在,則直接將這一歷元的全部觀測值進行隔離,單獨利用慣性導航的機械編排結果作為緊組合系統的輸出。這樣必然會使這一時段的導航精度下降,相當于犧牲結果精度來確保可靠性。文獻[5]則提出一種基于層次濾波器結構的故障檢測與系統重構方法,主濾波器利用所有衛星的觀測信息,子濾波器分別棄用1~n號衛星的量測信息,然后對子濾波器的χ2檢驗,當只有1個子濾波器未檢測到故障時,就可判斷該子濾波器棄用的衛星即為故障星。該方法結構復雜,運算量大。針對于此,本文采用w-檢測法與χ2檢驗法結合的方法,在已知單位權方差,觀測值互相獨立的情況下,先利用χ2檢驗法進行觀測值有效性的判斷,對確定存在故障星的歷元,再進行w-檢測,識別故障星并予以剔除,剩余正確的GNSS偽距、偽距率組合進入INS/GNSS緊組合卡爾曼濾波計算中,具體流程如圖2所示。
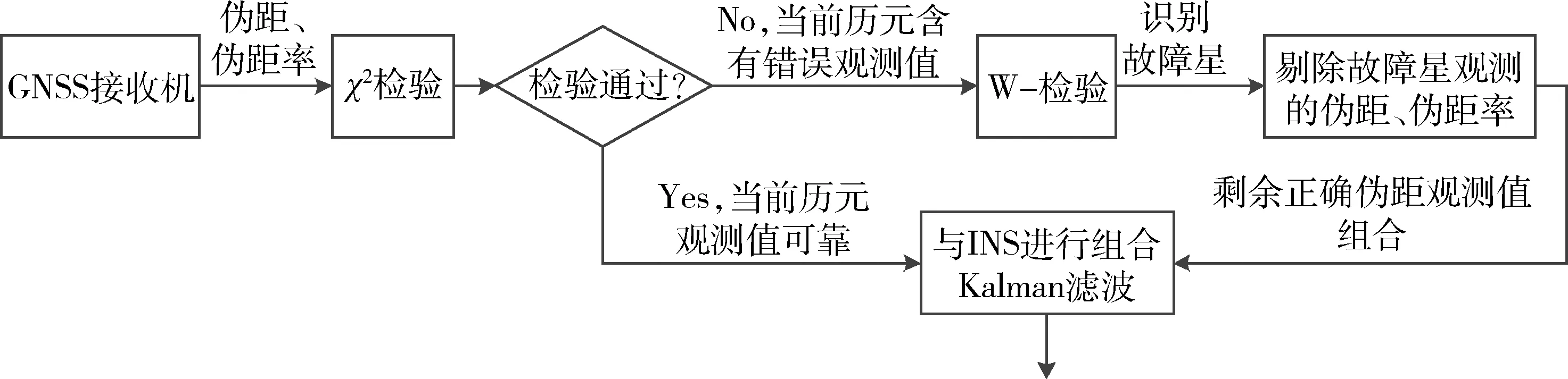
圖2 w-檢測法與χ2檢驗法結合的故障探測流程
該方法在組合卡爾曼濾波前進行,只針對GNSS原始觀測值進行粗差的探測和剔除。因此,對于偽距、偽距率錯誤,這種做法是可行的,而且能在前端就對觀測信息做篩選,大大提高后續組合導航結果的收斂性和可靠性。
2.2 改進的最小二乘殘差檢測法
GNSS偽距觀測方程為:
ρi=|rsi-rR|+ctR+εi
(1)
式中,ρi是偽距觀測值;|rsi-rR|是接收機與第i顆衛星的幾何距離;ctR是接收機鐘差在距離上的投影;εi是觀測誤差,包括衛星鐘差、大氣延遲誤差等。觀測值的最小二乘殘差為:
V=Bx-L=-(I-B(BTD-1B)-1BTD-1)L
(2)
令殘差向量的精度(改正數的協因數矩陣):
DV=D-B(BTD-1B)-1BT
(3)
所以式(3)可以寫為:
V=-(DVD-1)L=-(DVD-1)ε
(4)
令S=DVD-1,S稱為敏感矩陣,反映了觀測誤差ε對殘差改正數的影響程度。觀測誤差通過敏感矩陣映射到殘差上,因此,可以通過檢測殘差來判斷觀測值中是否有粗差存在。設原假設H0:當前觀測值中不存在粗差;備選假設H1:當前觀測值中有粗差。無論采用何種平差方法,殘差平方和服從自由度為n-u、非中心化參數為δ的χ2分布[6]:
(5)
在一定的誤警概率α下,有檢測門限值:
(6)

以χ2檢驗法確定存在故障衛星的歷元后,利用w-檢測法進行粗差定位,分別計算該歷元每個觀測值的wi[7]:
(7)
其中,σvi是DV對角線上的元素,sii是敏感矩陣S對角線上的元素,σi是觀測值Li的中誤差,σvi是對應的殘差中誤差。實際上,wi就是標準化的殘差,在原假設成立的條件下,wi服從標準正態分布,即wi~N(0,1);否則wi服從非中心化參數為δi的正態分布:wi~N(δi,1)。
在一定的誤警概率α下,有檢測門限值:
K=N1-α/2(0,1)
(8)
其中,N1-α/2(0,1)為在給定的置信度1-α下的臨界值。若|wi|≤K,則以1-α的概率認為觀測值Li沒有粗差,接受H0;反之,若|wi|≥K,則拒絕原假設,推測Li含有粗差,予以剔除。
2.3 改進的新息檢測法
把w-檢測法與χ2檢驗法結合用到卡爾曼濾波解算里,只是把最小二乘的殘差平方和轉換成新息平方和。與最小二乘不同的是,當前時刻的故障輸出將影響預測值,使它“跟蹤”故障輸出,因此故障存在后效性,在故障消失后容易產生誤警。
新息是當前歷元k時刻的觀測值與預測值的差值,即預測殘差:
Vk,k-1=Lk-Lk,k-1
(9)
仿照改進的最小二乘殘差法,先利用新息平方和服從自由度為n-u、非中心化參數為δ的χ2分布:
(10)
確定存在故障的歷元后,再結合w-檢測法,把標準化的新息作為統計檢驗量。原假設H0為Vk,k-1~N(0,DVk,k-1),若k時刻的第i個觀測值Li含有粗差▽bi(k),其新息為[8]:
Vk,k-1(bi(k))=Vk,k-1(i)-▽bi(k)
(11)
這時,備選假設H1為:
(12)

(13)
其中,
(14)
在給定的誤警概率下,計算臨界值N1-α/2(0,1)。若某一歷元中最大的標準化新息超出臨界值,則標記該觀測值為錯誤觀測值,將其剔除,重新利用剩余觀測值進行濾波估計,構造假設檢驗統計量進行檢驗,直到剩余的新息全部通過檢驗。
3 仿真分析
3.1 仿真方案設計
仿真實驗采用運動速度約為5m/s的GNSS偽距觀測數據,觀測衛星數10顆,GNSS接收機采樣頻率是2Hz,采集500s的觀測數據,共1000個歷元。對原始偽距觀測值進行了大氣誤差改正、相對論改正等處理,通過仿真模擬3號衛星故障,即在3號衛星的偽距觀測值中,加入不同形式的粗差模擬衛星故障,具體方法如下:按時間段分別添加絕對值為60m的階躍故障(硬故障)、斜率為2m/s的慢變斜坡故障(軟故障)以及斜率為4m/s的快變斜坡故障(軟故障),仿真故障模式見表1。
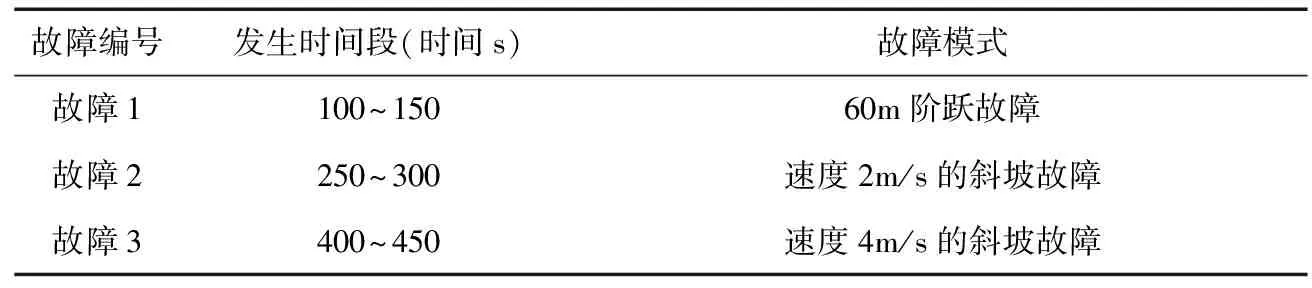
表1 仿真故障模式設置
在INS/GNSS緊組合之前,對GNSS數據分別采用改進的最小二乘殘差法(方法1)和改進的新息檢測法(方法2)對故障星探測,設置誤警率α=5%,自由度是5(可見衛星數減去必要衛星數),則χ2檢驗法的檢測門限為Td=11.0705,w-檢測法的檢測門限為Nd=1.6449。比較改進檢測算法在兩種應用場景下的區別。
3.2 仿真結果與分析
3.2.1 改進的最小二乘殘差檢測法
將w-檢測法與χ2檢驗法結合后運用到最小二乘中,在故障1、故障2和故障3三種模式下,得到結果如圖3~5所示。
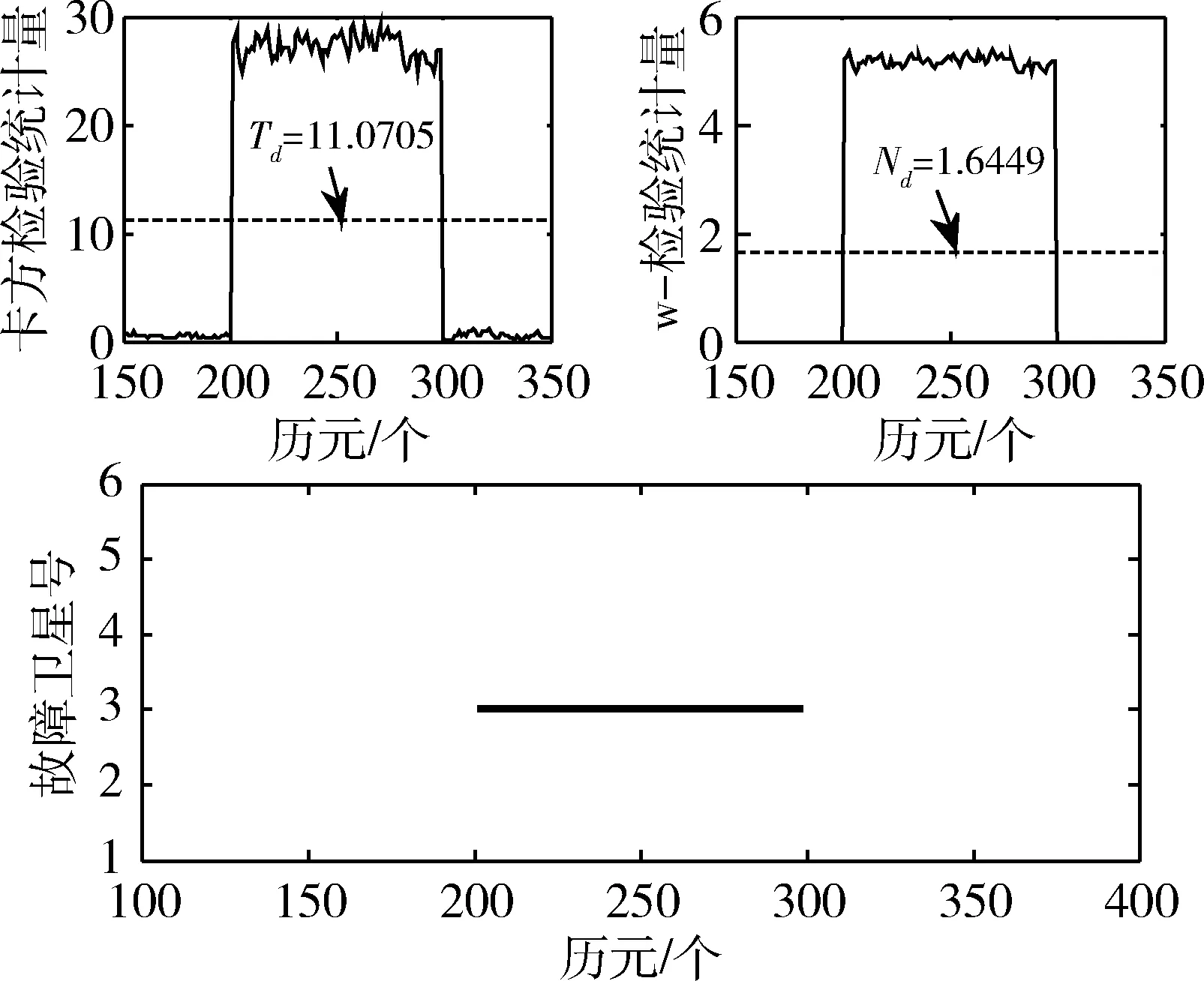
圖3 故障1模式下方法1故障識別結果

圖4 故障2模式下方法1故障識別結果
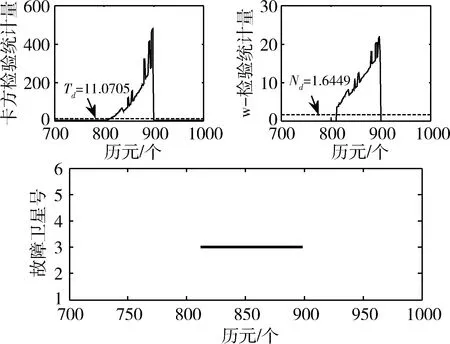
圖5 故障3模式下方法1故障識別結果
由圖3~5可以看出,無論何種故障模式,將w-檢測法與χ2檢驗法結合后運用到最小二乘中,都能精確地定位某一歷元發生故障的衛星,進而可以在濾波前隔離錯誤偽距、偽距率,選擇正確的原始觀測值組合。對于60m較大的階躍故障(圖3),該方法能夠迅速反應并探測到錯誤觀測值;對于2m/s的慢變斜坡故障(圖4),由于剛開始的粗差較小,殘差χ2檢驗對其不夠靈敏,未能檢測出故障星,但當粗差增大到一定值,通過w-檢測法能夠正確識別故障星;對于4m/s的快變斜坡故障(圖5),探測到軟故障的累計時間明顯縮短,反應更為迅速。
3.2.2 改進的新息檢測法
將w-檢測法與χ2檢驗法結合后運用到卡爾曼濾波中,在故障1、故障2和故障3三種模式下,結果如圖6~8所示。

圖6 故障1模式下方法2故障識別結果
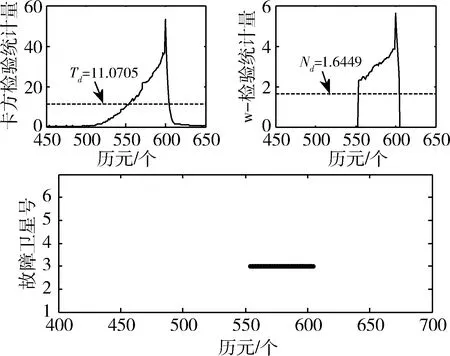
圖7 故障2模式下方法2故障識別結果

圖8 故障3模式下方法2故障識別結果
由圖6~8可以看出,在卡爾曼濾波中運用這種方法后,除了個別歷元外,大部分歷元能正確識別故障星。對于60m較大的階躍故障(圖6),200~250歷元存在錯誤定位故障衛星號現象,誤把6號衛星作為故障衛星;對于2m/s的慢變斜坡故障(圖7),同樣因殘差χ2檢驗對軟故障不夠靈敏,當粗差增大到一定值,通過w-檢測法能夠正確識別故障星。與最小二乘不同的是,在故障消除段600歷元以后,該方法仍顯示有故障存在,存在誤警,分析原因是因為當前時刻新息中受上一時刻的觀測粗差影響,即故障存在后效性;對于4m/s的快變斜坡故障(圖8),探測到軟故障的累計時間明顯縮短,反應更為迅速,誤警仍存在但有所改進。
對比這2種應用場景,可以看出,由于卡爾曼濾波新息檢測量受前一時刻故障的影響,使得殘差χ2檢驗“跟蹤”故障輸出,對故障的反應時間有所延遲,且有一定的后效性。并且由于前后2個時刻濾波值存在相關性,通過w-檢測法正確識別故障星的探測率是80.67%,正確率是86.36%。而在最小二乘中的殘差檢測量只受當前時刻故障的影響,該方法則無后效性;且通過w-檢測法識別故障星的探測率達到83.33%,正確率達到100%。因此,相對于利用濾波后的新息構造檢驗量探測故障星,單純的利用GNSS最小二乘殘差構造檢驗量進行衛星故障識別結果更好。綜上,無論是最小二乘還是卡爾曼濾波,綜合運用w-檢測和χ2檢驗的方法,取合適的顯著性水平,均能正確識別、剔除故障星,選擇可靠的觀測值組合;但由于χ2檢驗本身的特點,對開始較小的軟故障而言,反應不夠靈敏,故障時間判斷存在一定的延遲。
4 結論與展望
對于INS/GNSS緊組合容錯系統的設計,目前大多數方法都是在組合濾波之后進行故障檢測,且傳統的殘差χ2檢驗無法確定故障的具體原因和位置。針對衛星測量信息故障,本文提出在進行組合導航濾波計算之前,單獨對GNSS系統進行偽距和偽距率可信性檢測;并將w-檢測法引入,在已知單位權方差,且觀測值互相獨立的情況下,先利用χ2檢驗法進行觀測值有效性的判斷,對確定存在故障星的歷元,再進行w-檢測,識別故障星并予以剔除,剩余正確的GNSS偽距、偽距率組合進入INS/GNSS緊組合卡爾曼濾波計算中。在最小二乘和卡爾曼濾波2種場景下運用改進算法,在合適的顯著性水平下,均能正確識別故障星,選擇可靠的觀測值組合進入組合濾波階段。但由于χ2檢驗本身的特點,對軟故障而言,故障時間判斷存在一定延遲,繼而影響w-檢驗也存在延遲效應。對于這一問題,可以加入慣性導航系統信息或者其他輔助信息,增加冗余觀測量,進行故障的探測與隔離。
參 考 文 獻
[1] 秦永元, 張洪鉞, 汪叔華. 卡爾曼濾波與組合導航原理 [M]. 第3版. 西安: 西北工業大學出版社, 2015.(Qin Yongyuan, Zhang Hongyue, Wang Shuhua. Kalman Filter and Integrated Navigation Principles [M]. The third edition. Xi′an:Press of Northwestern Polytechnical University, 2015.)
[2] 吳有龍, 王曉鳴, 楊玲, 等. 兩級故障檢測與隔離方法在組合導航中的應用分析[J]. 彈道學報, 2013, 25(4):53-58,64.(Wu Youlong, Wang Xiaoming, Yang Ling, et al. Dual-stages Fault Detection and Isolation Method for Integrated Navigation System [J]. Journal of Ballistics, 2013, 25(4):53-58,64.)
[3] 劉海穎, 岳亞洲, 楊毅鈞, 等. 基于多解分離的GNSS/Inertial組合系統完好性監測[J].中國慣性技術學報, 2012, 20(1):63-68.(Liu Haiying, Yue Yazhou, Yang Yijun, et al, Integrity Monitoring for GNSS/Inertial Based on Multiple Solution Separation [J]. Journal of Chinese Inertial Technology, 2012, 20(1):63-68.)
[4] 張華強, 李東興, 張國強. 混合χ2檢測法在組合導航系統故障檢測中的應用[J]. 中國慣性技術學報, 2016, 24(5):696-700.(Zhang Huaqiang, Li Dongxing, Zhang Guoqiang. Application of Hybrid Chi-square Test Method in Fault Detection of Integrated Navigation System [J]. Journal of Chinese Inertial Technology, 2016, 24(5):696-700.)
[5] 張闖, 趙修斌, 龐春雷, 等. GNSS/SINS緊組合導航故障檢測與系統重構新方法[J]. 電光與控制, 2017, 24(2):100-104.(Zhang Chuang, Zhao Xiubin, Pang Chunlei, et al. A New Method of GNSS / SINS Tightly Integrated Navigation Fault Detection and System Reconstruction [J]. Electronics Optics & Control, 2017, 24(2):100-104.)
[6] 李德仁,袁修孝. 誤差與可靠性理論[M]. 第二版. 武漢: 武漢大學出版社,2012.(Li Deren, Yuan Xiuxiao. Error Processing and Reliability Theory [M]. The second edition. Wuhan:Press of Wuhan University, 2012.)
[7] Baarda W A. Testing Procedure for Use in Geodetic Networks [R]. Publications in Geodesy, New Series, Netherlands Geodetic Commission, Delft, Netherlands, 1968.
[8] 吳云. GNSS粗差檢測的“快照”法與“濾波”法的比較研究[J]. 武漢大學學報(信息科學版), 2010, 35(06):649-652,704.(Wu Yun. A Comparative Study of "Snapshot" and "Filtering" Methods for GNSS Error Detection [J]. Geomatics and Information Science of Wuhan University, 2010, 35(6):649-652,704.)
[9] Teunissen P J G. Quality Control in Integrated Navigation Systems [C]. IEEE Plans (90), Las Vegas, 1990.
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
汽車維修與保養(2019年7期)2020-01-06 03:30:42
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
汽車維護與修理(2016年10期)2016-07-10 08:17:41
海峽科技與產業(2016年3期)2016-05-17 04:32:12
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28
汽車維修與保養(2015年6期)2015-04-17 03:31:50