一種改進(jìn)的Stewart平臺(tái)Newton-Euler動(dòng)力學(xué)模型
2018-05-23 10:24:09何兆麒薛冬新宋希庚
振動(dòng)與沖擊 2018年9期
關(guān)鍵詞:模型
何兆麒, 薛冬新, 張 娟, 宋希庚
(1. 大連理工大學(xué) 能源與動(dòng)力學(xué)院, 遼寧 大連 116024; 2. 大連裝備職業(yè)技術(shù)學(xué)院 航海工程系, 遼寧 大連 116024)
自1965年,Stewart[1]發(fā)表了最早的將并聯(lián)機(jī)構(gòu)用作飛行模擬器的文章以來(lái),由于結(jié)構(gòu)剛度大、承載能力強(qiáng)、誤差小、精度高、動(dòng)力性能好等一系列優(yōu)點(diǎn),并聯(lián)機(jī)構(gòu)在空間對(duì)接、并聯(lián)機(jī)床、隔振、高精密平臺(tái)等方面得到廣泛應(yīng)用[2-12]。但因并聯(lián)平臺(tái)是閉環(huán)多剛體結(jié)構(gòu),使得運(yùn)動(dòng)學(xué)正解、動(dòng)力學(xué)分析更加復(fù)雜。目前,用于Stewart平臺(tái)的動(dòng)力學(xué)建模方法主要有牛頓-歐拉法、Lagrange法、虛功原理以及Kane法等。其中Newton-Euler法是由牛頓第二定律直接推導(dǎo)出來(lái)的,方法直觀,應(yīng)用廣泛。Fichter在忽略運(yùn)動(dòng)支鏈的質(zhì)量和鉸鏈摩擦的情況下,給出了平臺(tái)驅(qū)動(dòng)與慣性力以及外力之間的關(guān)系。Do等[3]基于Newton-Euler法建立了忽略關(guān)節(jié)摩擦和支腿軸向轉(zhuǎn)動(dòng)慣量時(shí)Stewart并聯(lián)機(jī)構(gòu)的逆動(dòng)力學(xué)模型。Dasgupta等在充分考慮Stewart動(dòng)平臺(tái)慣性、支腿慣性和關(guān)節(jié)摩擦的基礎(chǔ)上,提出了較為完善的Newton-Euler閉環(huán)動(dòng)力模型(下文以經(jīng)典模型指代),在此后的研究中得到廣泛的應(yīng)用。但逐漸有學(xué)者指出,該經(jīng)典模型存在幾點(diǎn)不足,① 忽略了支腿繞其自身軸線的回轉(zhuǎn)運(yùn)動(dòng);② 假設(shè)萬(wàn)向鉸處的約束力矩沿著支桿方向;③ 計(jì)算各結(jié)構(gòu)的轉(zhuǎn)動(dòng)慣量時(shí)沒(méi)有正確考慮平行軸定理。雖然以上這些假設(shè)簡(jiǎn)化了模型,提高了計(jì)算效率,但這些假設(shè)不符合實(shí)際,會(huì)降低模型的準(zhǔn)確性。李長(zhǎng)春等[13]提出一種考慮支腿轉(zhuǎn)動(dòng)的逆動(dòng)力學(xué)模型,通過(guò)算例比較了忽略支腿繞自身轉(zhuǎn)軸轉(zhuǎn)動(dòng)對(duì)運(yùn)動(dòng)學(xué)逆解的影響。Fu等[14-15]從不同的方面給出了修改建議,郭洪波[16]從能量的角度分析了忽略支腿繞自身軸線的回轉(zhuǎn)運(yùn)動(dòng)對(duì)動(dòng)力學(xué)模型的影響。Pedrammehr等[17]綜合上述三方面,建立了改進(jìn)的牛頓-歐拉動(dòng)力學(xué)模型,逆動(dòng)力學(xué)計(jì)算結(jié)果表明改進(jìn)模型與Dasgupta的經(jīng)典模型有明顯的不同。
由理論力學(xué)的相關(guān)知識(shí)可知,利用轉(zhuǎn)動(dòng)慣量表示剛體的動(dòng)量矩時(shí),矩心是否為剛體固連點(diǎn),將影響動(dòng)量矩定理的具體表述形式。建立Stewart平臺(tái)的動(dòng)力學(xué)模型時(shí),通常將單個(gè)支腿簡(jiǎn)化為上、下支桿,分別關(guān)于下鉸點(diǎn)取矩。下支桿受力關(guān)于下鉸點(diǎn)的力矩平衡可認(rèn)為是對(duì)剛體固連點(diǎn)取矩,而上支桿受力對(duì)下鉸點(diǎn)的力矩平衡是對(duì)剛體外一點(diǎn)取矩,兩者應(yīng)做不同處理。但以往的研究忽略了這一點(diǎn),因此,筆者認(rèn)為經(jīng)典模型除了以上三點(diǎn)不足外,還存在以下問(wèn)題,即:在建立支腿和動(dòng)平臺(tái)的歐拉方程時(shí),沒(méi)有合理區(qū)分力矩簡(jiǎn)化中心是否固連于剛體。基于這一考慮,筆者在文獻(xiàn)[18]僅針對(duì)上支桿歐拉方程的建立,給出了修改建議。本文首先闡述改進(jìn)工作的理論依據(jù),其次針對(duì)6-UPS型Stewart平臺(tái),在前人研究成果的基礎(chǔ)上,區(qū)分矩心是否為剛體固連點(diǎn),在第2、3節(jié)分別建立利用非質(zhì)心轉(zhuǎn)動(dòng)慣量和質(zhì)心轉(zhuǎn)動(dòng)慣量表示的兩種改進(jìn)閉環(huán)動(dòng)力學(xué)模型。最后通過(guò)求解文獻(xiàn)[4]的算例,比較本文改進(jìn)模型和經(jīng)典模型動(dòng)態(tài)響應(yīng)的不同,說(shuō)明改進(jìn)的必要性。
1 理論依據(jù)
如圖1所示,以O(shè)0為原點(diǎn)建立慣性坐標(biāo)系O0x0y0z0,C是剛體質(zhì)心,B點(diǎn)相對(duì)于慣性系作任意運(yùn)動(dòng),關(guān)于動(dòng)點(diǎn)的動(dòng)量矩定理可表示為
(1)

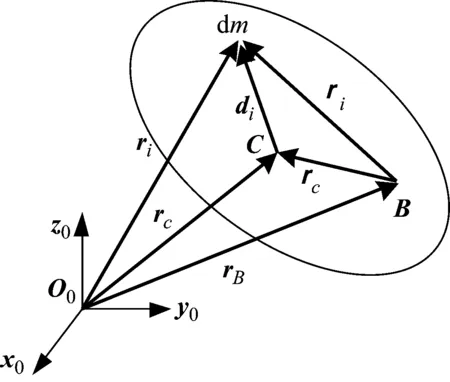
圖1 剛體上質(zhì)量微元dm的矢量表示

(2)

將式(2)代入式(1)得
(3)
當(dāng)點(diǎn)B靜止時(shí),式(3)變?yōu)?/p>
(4)

(5)
當(dāng)B點(diǎn)固定時(shí),式(5)仍然成立。
下文中為敘述方便,將式(3)稱(chēng)為依據(jù)一,式(5)稱(chēng)為依據(jù)二。
2 6-UPS型Stewart平臺(tái)動(dòng)力學(xué)分析
本文所研究的Stewart平臺(tái)結(jié)構(gòu)及第i支桿矢量表示如圖2所示。下平臺(tái)固定,連桿與上、下平臺(tái)分別采用球鉸、萬(wàn)向鉸連接,支桿為直線運(yùn)動(dòng)副,機(jī)構(gòu)具有六個(gè)運(yùn)動(dòng)自由度。上、下平臺(tái)六個(gè)鉸鏈點(diǎn)中心分別為Pi、Bi(i=1,…,6)。為便于運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)分析,在上、下平臺(tái)的幾何中心點(diǎn)P、B處建立連體坐標(biāo)系{PX1Y1Z1}、參考坐標(biāo)系{BXYZ}。

圖2 Stewart平臺(tái)及第i支桿矢量圖
以下符號(hào)被用于平臺(tái)建模中:tp為上平臺(tái)參考點(diǎn)P在{B}中的位置矢量;ωp,αp為上平臺(tái)角速度、角加速度;Rp為RPY角描述的上平臺(tái)的旋轉(zhuǎn)變換矩陣;pi為上平臺(tái)各球鉸鉸心Pi在{P}中的位置矢量;bi為下平臺(tái)各萬(wàn)向鉸鉸心Bi在{B}中的位置矢量;Si為鉸心Bi到對(duì)應(yīng)Pi在{B}中的位置矢量;ei為第i根支桿單位矢量;ωli,αli為第i根支桿的角速度、角加速度;Iu0i,Id0i為上下支桿在各自質(zhì)心坐標(biāo)系(坐標(biāo)原點(diǎn)在上下支桿質(zhì)心處,方向與{D}相同)的慣量矩陣;Ip0:上平臺(tái)和質(zhì)量負(fù)載在質(zhì)心坐標(biāo)系(原點(diǎn)在上平臺(tái)綜合質(zhì)心,方向與{P}相同)的慣量矩陣。
2.1 第i個(gè)支桿運(yùn)動(dòng)學(xué)分析
在Pi、Bi處建立上、下支桿局部坐標(biāo)系{U}、{D},坐標(biāo)系{D}的x軸沿支桿方向,y軸沿萬(wàn)向鉸軸線方向,z軸由右手定則確定,{U}各軸與{D}相應(yīng)的軸線平行。此外,在Bi處還有支腿固定坐標(biāo)系{BiXBiYBiZBi},方向與{B}平行。
(1) 上平臺(tái)鉸接點(diǎn)速度、加速度分析
由圖2可知,第i支桿的位置矢量
Si=tp+Rppi-bi=tp+qi-bi
(6)
則支桿長(zhǎng)度和沿支桿單位矢量可以表示為
(7)
ei=Si/Li
(8)
對(duì)式(6)兩端微分,得點(diǎn)Pi的速度、加速度為
(9)
(10)

(11)
(12)
(2) 支桿滑動(dòng)速度、加速度分析
由式(11)、式(12),結(jié)合式(10)整理得支桿伸縮速度、伸縮加速度分別為
(13)
(14)

(3) 支桿角速度ωli、角加速度αli分析
如圖3所示,單位向量ki、yi、hi代表第i個(gè)萬(wàn)向鉸模型,ki沿著萬(wàn)向鉸的固定軸,yi沿著萬(wàn)向鉸的旋轉(zhuǎn)軸,hi垂直于ki、yi組成的平面。由結(jié)構(gòu)特點(diǎn)知,yi與ki共面且相互垂直,與支桿單位向量ei也相互垂直,xi、yi、zi代表上文的坐標(biāo)系{D}。因此,從{D}~{BiXBiYBiZBi}的旋轉(zhuǎn)變換矩陣為
Ti=[xi,yi,zi]
(15)

由運(yùn)動(dòng)學(xué)約束知,ωli位于ki、yi組成的平面內(nèi)
ωli=ωkiki+ωyiyi
(16)
式中:ωki、ωyi分別為支桿角速度沿著ki、yi的分量。

圖3 萬(wàn)向鉸結(jié)構(gòu)簡(jiǎn)圖
文獻(xiàn)[4-5]假設(shè)支桿角速度ωli⊥ei,即要求支桿垂直于ki、yi組成的平面。由結(jié)構(gòu)特點(diǎn)知,這就要求必須忽略支桿繞自身軸線的旋轉(zhuǎn)自由度,顯然這不符合實(shí)際,因此假設(shè)ωli⊥ei是不合理的。
將式(16)代入式(11),整理得
(17)
(18)
對(duì)式(16)兩端求導(dǎo),支桿角加速度αli表示為

αli=αkiki+αyiyi+ωyiωkihi
(19)
此外,ωli還可以分解為垂直于支桿的分量ω和沿著支桿方向的分量ωeiei,即
ωli=ω+ωeiei
(20)
將式(20)代入式(11),可得到
(21)
因ωli位于ki、yi組成的平面內(nèi),而hi垂直于該平面,所以ωli·hi=0。利用這一性質(zhì),由式(20)得
ωei=-(ω·hi)/(ei·hi)
(22)
同樣,αli可以分解為垂直于支桿的分量α和沿著支桿方向的分量αeiei,即
αli=α+αeiei
(23)
將式(23)代入式(12),整理得
α=(ei×api)/Li+U2i
(24)

由式(23)和式(19)整理得
αki=(α+αeiei)·ki
(25)
αei=[(α·ki)ki·ei+ωyiωkihi·ei]/1-
(26)
至此,將式(24)、式(26)代入式(23)得到支桿角加速度的完整表達(dá)

u2iei
(27)

(4) 上、下支桿質(zhì)心速度、加速度分析
上、下支桿質(zhì)心(圖2中的Gu、Gd)在{BiXBiYBiZBi}的位置矢量rui、rdi可表示為
rui=Ti(vi+ru0i)
(28)
rdi=Tird0i
(29)

因此,上、下支桿質(zhì)心的加速度可分別表示為
(30)
(31)
2.2 第i個(gè)支桿動(dòng)力學(xué)分析
應(yīng)用平行軸定理,上下支桿對(duì)點(diǎn)Bi的慣量矩陣為

圖4是單個(gè)運(yùn)動(dòng)支鏈的受力簡(jiǎn)圖,F(xiàn)si是球鉸處約束力,Cu和Cs是萬(wàn)向鉸和球鉸處的黏性阻尼系數(shù)。Fui、Mui分別為萬(wàn)向鉸處的約束力矢量和約束力矩幅值。因?yàn)槿f(wàn)向鉸在yi、ki兩個(gè)方向上有旋轉(zhuǎn)自由度,約束力矩只能沿著hi方向,因此約束力矩為Muihi,而不是經(jīng)典模型中的Muiei。

圖4 第i個(gè)支桿受力分析示意圖
根據(jù)第1節(jié)中依據(jù)一,結(jié)合受力分析,建立整個(gè)支桿關(guān)于Bi點(diǎn)的歐拉方程
-rui×muaDi+(mdrdi+murui)×g-(Idi+Iui)αli-
ωli×(Idi+Iui)ωli+Muihi+Si×Fsi-Cuωli-
fi=0
(32)
式中:fi=Cs(ωli-ωp)為球絞摩擦力矩;aDi為該瞬時(shí),上支桿上與Bi點(diǎn)相重合的點(diǎn)的絕對(duì)加速度。
由運(yùn)動(dòng)學(xué)分析知
(33)
將式(14)代入式(33)整理得
aDi=(ei·api)ei+U3i
(34)

將式(32)改寫(xiě)為
Muihi+Si×Fsi=Ni
(35)
其中,
Ni=rui×muaDi-(mdrdi+murui)×g+
(Idi+Iui)αli+ωli×(Idi+Iui)ωli+Cuωli+fi
(36)
式(35)兩端點(diǎn)乘、叉乘ei,得到Mui及Fsi為
Mui=(Ni·ei)/(hi·ei)
(37)
Fsi=ei(ei·Fsi)+(Ni×ei-Muihi×ei)/Li
(38)
為了得到(ei·Fsi),考慮上支桿沿支桿方向的受力平衡
(39)
式中:Facti、Cp分別為滑移鉸處支桿主動(dòng)力、黏性摩擦因數(shù)。
將式(37)、式(39)代入式(38)整理得

(40)
將式(36)代入式(40),利用式(30)、式(14)、式(23)、式(33),并結(jié)合矢量計(jì)算規(guī)則化簡(jiǎn)Fsi的表達(dá)式
(41)
其中

U4i=u1iei+U2i×rui+ωli×(ωli×rui);
U5i=mu(rui×U3i)+(Idi+Iui)(U2i+u2iei)-
(mdrdi+murui)×g+ωli×(Idi+Iui)ωli+Cuωli+fi;
為了推導(dǎo)式(41),需要用到以下矢量代數(shù)運(yùn)算規(guī)則

(a·b)c=(aTb)c=c(aTb)

2.3 上平臺(tái)運(yùn)動(dòng)學(xué)、動(dòng)力學(xué)分析
上平臺(tái)和質(zhì)量負(fù)載的綜合質(zhì)心在{B}中的位置矢量表示為
qc=tp+RpR0=tp+R
(42)
式中:R0為上平臺(tái)和質(zhì)量負(fù)載的綜合質(zhì)心在{P}中的位置矢量。
對(duì)式(42)進(jìn)行微分,得到綜合質(zhì)心的加速度
(43)
由平行軸定理,上平臺(tái)和質(zhì)量負(fù)載對(duì)點(diǎn)P的轉(zhuǎn)動(dòng)慣量為
(44)
式中:mp為上平臺(tái)和質(zhì)量負(fù)載的質(zhì)量之和。
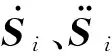
圖5 上平臺(tái)受力分析簡(jiǎn)圖
上平臺(tái)的牛頓方程、相對(duì)點(diǎn)P的歐拉方程分別為
(45)
(46)
式中:Fext,Mext分別為外界作用于上平臺(tái)的作用力和作用力矩在局部坐標(biāo)系{P}中的表示。
將式(43)、式(41)代入式(45)、式(46)進(jìn)行整理
(47)
(48)
合并式(47)、式(48),得到上平臺(tái)的完整動(dòng)力學(xué)方程
(49)
其中,

H=
3 質(zhì)心轉(zhuǎn)動(dòng)慣量表示的6-UPS Stewart平臺(tái)閉環(huán)動(dòng)力學(xué)方程
文獻(xiàn)[4-5]建立的歐拉方程,包含了質(zhì)心加速度項(xiàng),如果從這一角度推導(dǎo)方程,則方程中轉(zhuǎn)動(dòng)慣量項(xiàng)的計(jì)算需要做出調(diào)整。為了評(píng)估此誤差,本節(jié)以第1節(jié)的依據(jù)二為基礎(chǔ),利用質(zhì)心轉(zhuǎn)動(dòng)慣量建立動(dòng)力學(xué)模型。這種表述形式下,對(duì)支桿和上平臺(tái)的運(yùn)動(dòng)學(xué)分析同2.1、2.3,不同在于各結(jié)構(gòu)動(dòng)力學(xué)方程的建立。
第i個(gè)支桿關(guān)于Bi點(diǎn)的歐拉方程為
(Idci+Iuci)αli-ωli×(Idci+Iuci)ωli+
Muihi+Si×Fsi-Cuωli-fi=0
(50)

采用同式(32)類(lèi)似的簡(jiǎn)化運(yùn)算,得到
(51)
其中,


(Idci+Iuci)(U2i+u2iei)
u1i,U2i,u2i的表達(dá)式同第2節(jié)。

上平臺(tái)和質(zhì)量負(fù)載關(guān)于質(zhì)心坐標(biāo)系(原點(diǎn)在綜合質(zhì)心,方向與{B}相同)的轉(zhuǎn)動(dòng)慣量為
(52)
考慮上平臺(tái)相對(duì)點(diǎn)P的力矩平衡
(53)
將式(43)、式(51)代入式(53)進(jìn)行整理
mpR×[ωp×(ωp×R)-g]+ωp×Ipcωp+
(54)
合并式(47)、式(54),得到上平臺(tái)的完整動(dòng)力學(xué)方程
(55)
其中,

4 計(jì)算實(shí)例
為了比較改進(jìn)模型與原模型的不同,筆者利用兩種改進(jìn)形式的Stewart平臺(tái)完整動(dòng)力學(xué)模型式(49)、式(55)求解文獻(xiàn)[4]的計(jì)算實(shí)例,并與原文的結(jié)果進(jìn)行比較。Stewart平臺(tái)的結(jié)構(gòu)參數(shù)、初始條件見(jiàn)附錄2。
同經(jīng)典模型一樣,采用基于任務(wù)空間運(yùn)動(dòng)狀態(tài)反饋的PD控制算法求解支桿主動(dòng)力,PD算法描述如下

(56)
式中:Kp=[4.0×1054.0×1054.0×1065.0×1045.0×1041.0×105]T;Kd=[1.0×1041.0×1042.0×1041.0×1031.0×1032.0×103]T。
4.1 第一種改進(jìn)模型式與經(jīng)典模型比較
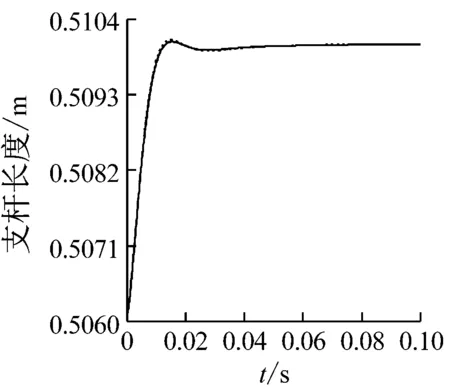
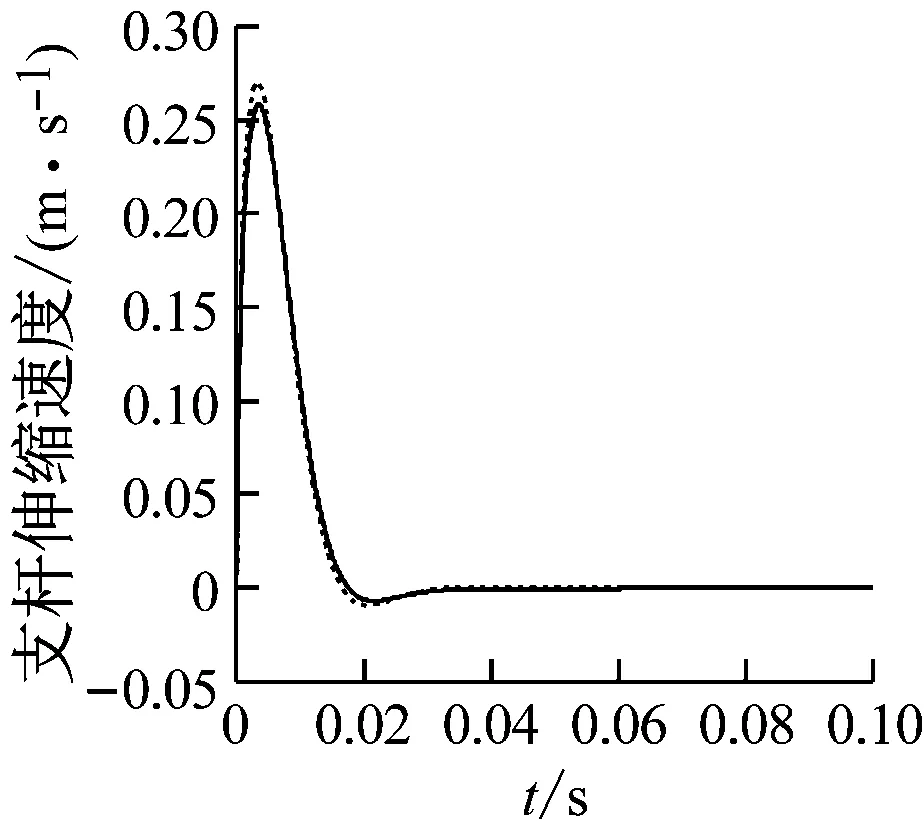
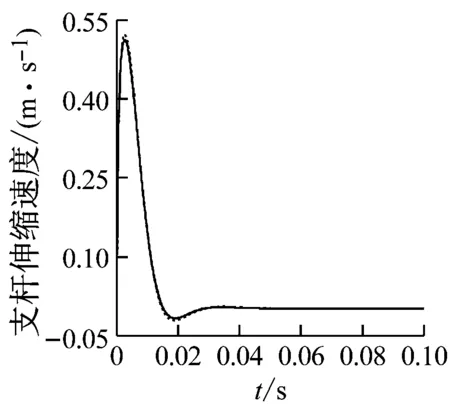
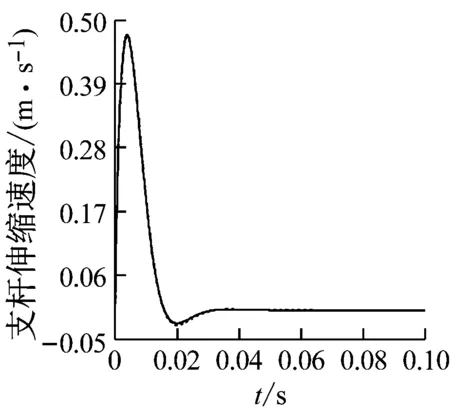
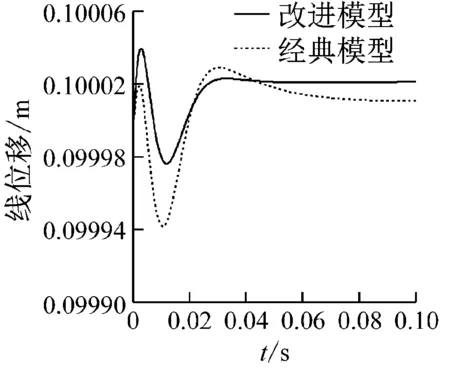
根據(jù)式(49)求解支桿長(zhǎng)度、伸縮速度和上平臺(tái)位移、速度的響應(yīng)曲線,并與原模型計(jì)算結(jié)果一起顯示在圖6~圖9中,所有圖中實(shí)線、虛線分別為改進(jìn)模型、原模型的響應(yīng)結(jié)果。圖6、圖7的第一張小圖右上角展示了Leg1長(zhǎng)度和運(yùn)動(dòng)速度變化的局部放大曲線。可以觀察到響應(yīng)曲線的初始階段及峰值處,兩種模型下Leg1的長(zhǎng)度和速度值略有不同,其余支桿也呈現(xiàn)類(lèi)似的情況。
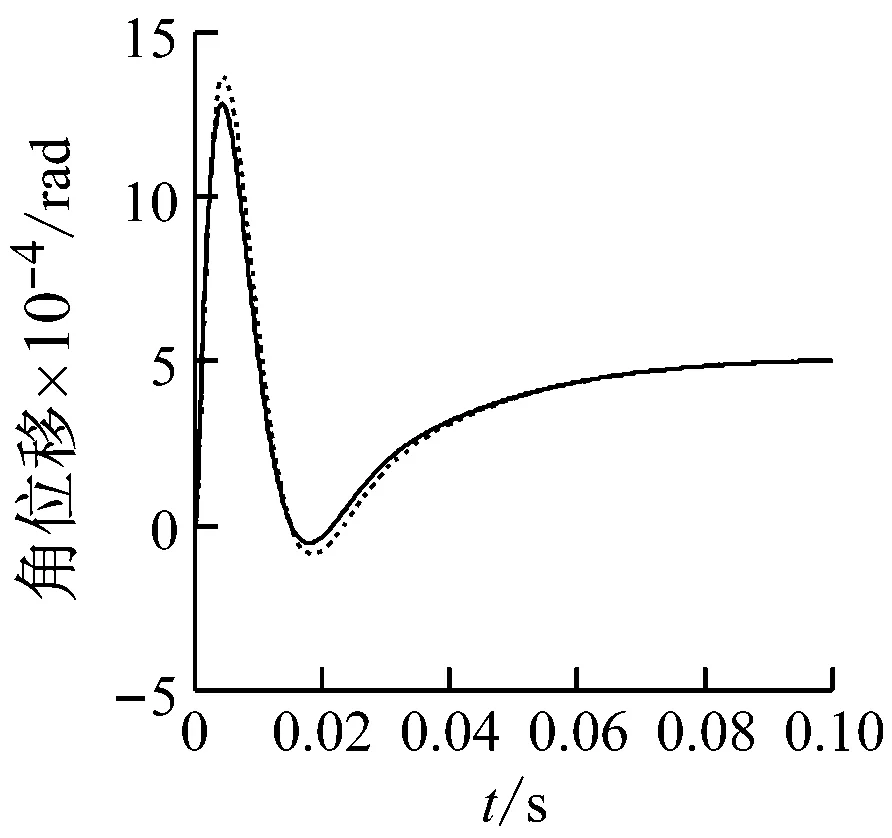
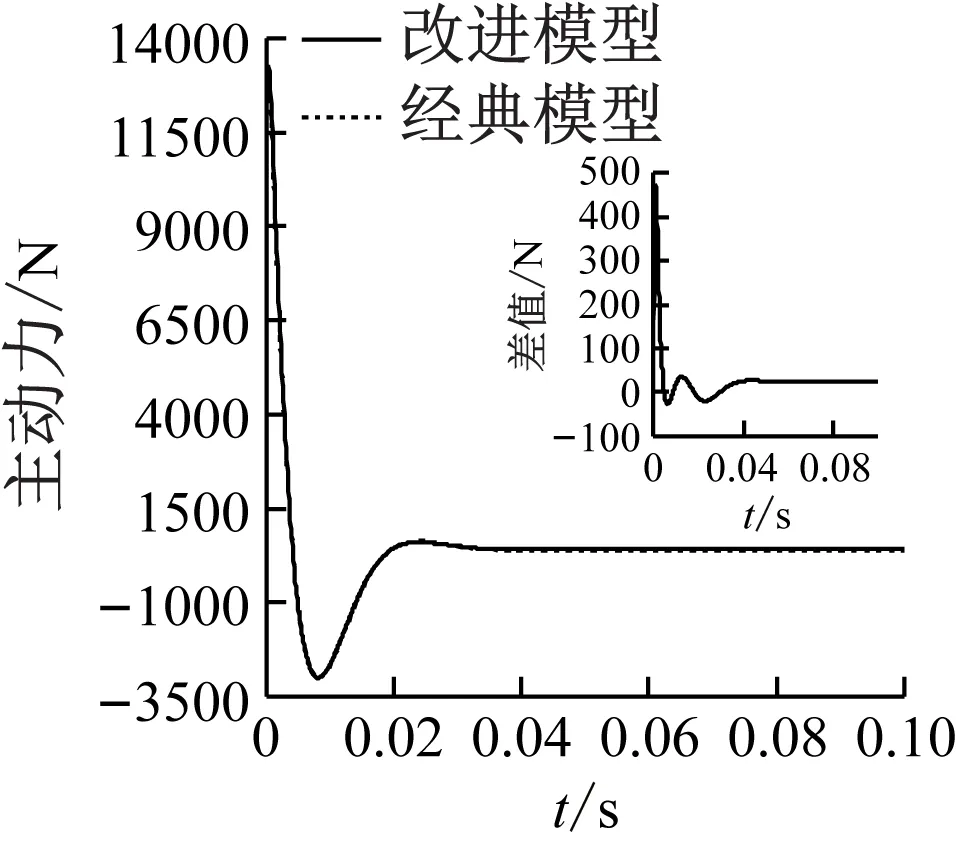
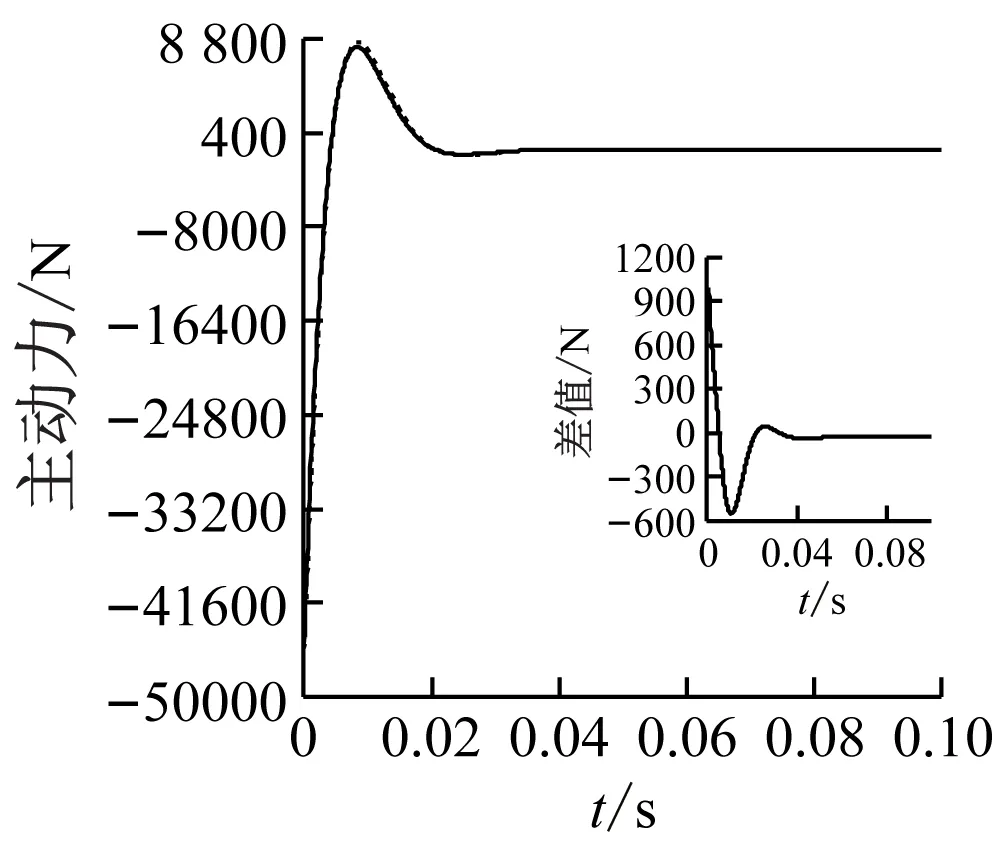
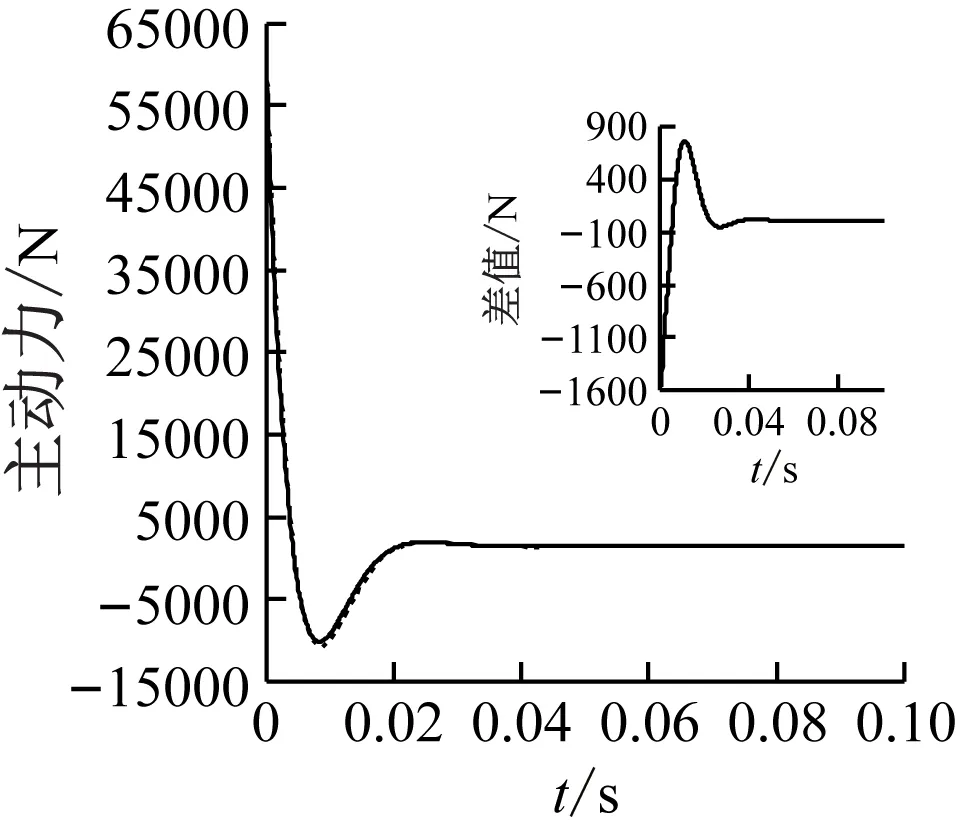
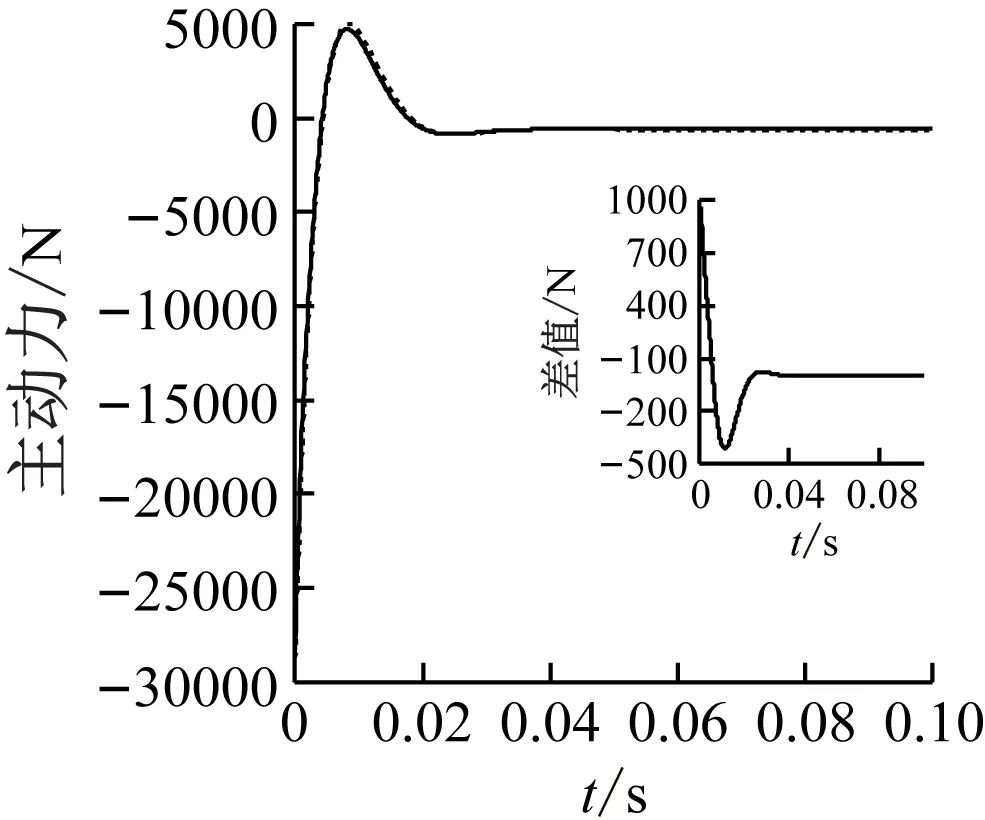
同樣,由圖8和圖9可見(jiàn),改進(jìn)模型、原模型求解得到的上平臺(tái)位移、速度、轉(zhuǎn)角、角速度都具有相似的變化趨勢(shì),但幅值不同。由于初始狀態(tài)和期望狀態(tài)線位移tp、角位移θp的X、Y方向分量為0,因此兩模型在這兩個(gè)方向上的差值數(shù)量級(jí)很低。而速度響應(yīng)在峰值處差值較為明顯。圖10描述了6根支桿所需的主動(dòng)力,每個(gè)圖中的小圖描述了兩種模型的差值,峰值處最大的誤差值達(dá)到了45.94%。所以,從整體上來(lái)看,改進(jìn)模型和原模型所有運(yùn)動(dòng)參數(shù)具有相似的變化趨勢(shì),但在峰值處,幅值呈現(xiàn)較為明顯的不同。
4.2 第二種改進(jìn)模型式與經(jīng)典模型比較
經(jīng)計(jì)算,由(55)得到的響應(yīng)曲線與第一種改進(jìn)形式(49)的結(jié)果完全一致,因此,第二種改進(jìn)模型式(56)與經(jīng)典模型的比較同圖6~圖10。由于篇幅有限,此處不再展示。實(shí)際上,第1節(jié)中的依據(jù)一、二本質(zhì)上是一樣的,它們是動(dòng)量矩定理的兩種不同表述。因此,以此為基礎(chǔ)得到的兩種改進(jìn)形式本質(zhì)上也是一致的。
5 結(jié) 論
本文在考慮支桿繞自身軸線的旋轉(zhuǎn)自由度、修正萬(wàn)向鉸約束力矩、合理應(yīng)用平行軸定理計(jì)算各部分轉(zhuǎn)動(dòng)慣量、正確利用動(dòng)量矩定理建立支桿及平臺(tái)的歐拉方程的基礎(chǔ)上,對(duì)原有基于Newton-Euler法建立的Stewart平臺(tái)經(jīng)典閉環(huán)動(dòng)力學(xué)模型進(jìn)行改進(jìn)。得到質(zhì)心轉(zhuǎn)動(dòng)慣量和非質(zhì)心轉(zhuǎn)動(dòng)慣量表示的兩種不同形式改進(jìn)模型,這兩種模型從本質(zhì)上是一致的,計(jì)算結(jié)果很好的說(shuō)明了這一點(diǎn)。
此外,從改進(jìn)模型與原模型的計(jì)算結(jié)果比較來(lái)看,所有參數(shù)變化趨勢(shì)相同,但所有時(shí)間點(diǎn)的響應(yīng)呈現(xiàn)不同程度的誤差,尤其是曲線峰值處。由于算例中設(shè)置的初始條件和期望狀態(tài)的差值很小,而且整個(gè)Stewart平臺(tái)結(jié)構(gòu)尺寸、重量也較小,因此最終的比較結(jié)果并沒(méi)有表現(xiàn)出特別顯著的不同。從理論推導(dǎo)的角度來(lái)看,改進(jìn)模型雖然只是對(duì)方程中某些項(xiàng)做了的修正,但提高了模型的準(zhǔn)確性。對(duì)大型的平臺(tái)結(jié)構(gòu)這些修正帶來(lái)的影響可能會(huì)更顯著,因此改進(jìn)工作是很有必要的,對(duì)后期的研究具有重要意義。

(a) Leg 1

(b) Leg 2

(c) Leg 3

(d) Leg 4
(e) Leg 5

(f) Leg 6
圖6 支桿長(zhǎng)度隨時(shí)間變化曲線
Fig.6 Time response curve of pod length

(a) Leg 1

(b) Leg 2

(c) Leg 3
(d) Leg 4
(e) Leg 5
(f) Leg 6
圖7 支桿速度的時(shí)間響應(yīng)曲線
Fig.7 Time response curve of pod velocity
(a)X



(a) Leg 1
(b) Leg 2
(c) Leg 3
(d) Leg 4

(e) Leg 5

(f) Leg 6
參 考 文 獻(xiàn)
[1] STEWART D. A platform with six degrees of freedom[J]. Proceedings of the Institution of Mechanical Engineers, 1965, 180(1): 371-386.
[2] FICHTER E F. A stewart platform-based manipulator: general theory and practical construction[J]. The International Journal of Robotics Research, 1986, 5(2): 157-182.
[3] DO W Q D, YANG D C H. Inverse dynamic analysis and simulation of a platform type of robot[J]. Journal of Robotic Systems, 1988, 5(3): 209-227.
[4] DASGUPTA B, MRUTHYUNJAYA T S. Closed-form dynamic equations of the general Stewart platform through the Newton-Euler approach[J]. Mechanism and Machine Theory, 1998, 33(7): 993-1012.
[5] DASGUPTA B, MRUTHYUNJAYA T S. A Newton-Euler formulation for the inverse dynamics of the stewart platform manipulator[J]. Mechanism and Machine Theory, 1998, 33(8): 1135-1152.
[6] LEE K M, SHAH D K. Dynamic analysis of a three-degrees-of-freedom in-parallel actuated manipulator[J]. IEEE Journal on Robotics and Automation, 1988, 4(3): 361-367.
[7] YANG J, GENG Z J. Closed form forward kinematics solution to a class of hexapod robots[J]. IEEE Transactions on Robotics and Automation, 1998, 14(3): 503-508.
[8] WANG J, GOSSELIN C M. A new approach for the dynamic analysis of parallel manipulators[J]. Multibody System Dynamics, 1998, 2(3): 317-334.
[9] TSAI L W. Solving the inverse dynamics of a Stewart-Gough manipulator by the principle of virtual work[J]. Journal of Mechanical Design, 2000, 122(1): 3-9.
[10] LIU M J, LI C X, LI C N. Dynamics analysis of the Gough-Stewart platform manipulator[J]. IEEE Transactions on Robotics and Automation, 2000, 16(1): 94-98.
[11] 羅波,李偉鵬,黃海.基于Stewart平臺(tái)的大柔性空間桁架結(jié)構(gòu)振動(dòng)控制[J]. 振動(dòng)與沖擊, 2012,31(23):148-153.
LUO Bo,LI Weipeng,HUANG Hai. Vibration control of a large flexible space truss using a Stewart platform manipulator[J]. Journal of Vibration and Shock, 2012,31(23):148-153.
[12] 李喬博,王超新,黃修長(zhǎng),等. 基于Stewart平臺(tái)微振動(dòng)主動(dòng)控制分析與實(shí)驗(yàn)[J].噪聲與振動(dòng)控制, 2016,36(3):214-218.
LI Qiaobo, WANG Chaoxin, HUANG Xiuchang, et al. Analysis and experiment of micro-vibration active control based on a stewart platform[J]. Noise and Vibration Control, 2016,36(3):214-218.
[13] 李長(zhǎng)春,延皓,張金英,等. 一種改進(jìn)的6自由度運(yùn)動(dòng)模擬器逆動(dòng)力學(xué)模型[J].兵工學(xué)報(bào), 2009,30(4):446-450.
LI Changchun,YAN Hao,ZHANG Jinyin, et al. An improved inverse dynamics model of 6-DOF motion simulator[J]. Acta Armamentarii, 2009,30(4):446-450.
[14] FU S W, YAO Y. Comments on “A Newton-Euler formulation for the inverse dynamics of Stewart platform manipulator” by B. dasgupta and T.S. mruthyunjaya[mech. mach. theory 33 (1998) 1135-1152][J]. Mechanism and Machine Theory, 2007,42(12):1668-1671.
[15] VAKIL M, PENDAR H, ZOHOOR H. Comments to the:“Closed-form dynamic equations of the general Stewart platform through the Newton-Euler approach” and “A Newton-Euler formulation for the inverse dynamics of the Stewart platform manipulator”[J]. Mechanism and Machine Theory, 2008,43(10): 1349-1351.
[16] 郭洪波. 液壓驅(qū)動(dòng)六自由度平臺(tái)的動(dòng)力學(xué)建模與控制[D]. 哈爾濱: 哈爾濱工業(yè)大學(xué), 2006.
[17] PEDRAMMEHR S, MAHBOUBKHAH M, KHANI N. Improved dynamic equations for the generally configured Stewart platform manipulator[J]. Journal of Mechanical Science and Technology, 2012, 26(3): 711-721.
[18] HE Z, SONG X, XUE D. Comments to the:“Closed-form dynamic equations of the general Stewart platform through the Newton-Euler approach” and “A Newton-Euler formulation for the inverse dynamics of the Stewart platform manipulator”[J]. Mechanism and Machine Theory, 2016, 102(10): 229-231.
[19] WITTENBURG J. Dynamics of multibody systems[M]. New York: Springer Science & Business Media, 2007.
附錄
Stewart平臺(tái)機(jī)構(gòu)參數(shù)(均采用國(guó)際單位制)負(fù)載平臺(tái)(包括質(zhì)量負(fù)載)的質(zhì)量:mp=40.0; 上、下支腿的質(zhì)量:mu=1.0,md=3.0;負(fù)載平臺(tái)(包括質(zhì)量負(fù)載)的綜合質(zhì)心在{P}的位置矢量:R0=[0.04 0.03 -0.06]T;上、下支腿的重心位置:ru0i=[-0.6 -0.08 0.08]T、rd0i=[0.4 0.14 -0.18]T;萬(wàn)向鉸、柱鉸和球鉸的黏滯阻尼系數(shù):Cu=0.000 1,Cp=0.001,Cs=0.000 2。
虎克鉸固定軸的單位矢量
k=

支桿上、下連接點(diǎn)的在各自局部坐標(biāo)系的位置

上下支桿關(guān)于各自質(zhì)心坐標(biāo)系(坐標(biāo)原點(diǎn)在上下支桿質(zhì)心處,方向與{D}相同)的慣量矩陣

上平臺(tái)和質(zhì)量負(fù)載在質(zhì)心坐標(biāo)系(原點(diǎn)在綜合質(zhì)心,方向與{P}相同)的慣量矩陣
任務(wù)空間初始狀態(tài)和期望狀態(tài)
tp0=[0.1 0.0 0.395]T,θp0=[0.0 0.0 -0.2]T;
tpd=[0.1 0.0 0.4]T,θpd=[0.0 0.0 -0.2]T;
Fext=0,Mext=0。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19