繩索驅(qū)動的仿生關(guān)節(jié)設(shè)計與仿真分析
2018-05-23 06:38:00王從浩張春林佳裔朱春濤
機(jī)械工程師 2018年5期
關(guān)鍵詞:模型
王從浩, 張春, 林佳裔, 朱春濤
(合肥工業(yè)大學(xué)機(jī)械工程學(xué)院,合肥 230002)
0 引言
隨著機(jī)器人技術(shù)的發(fā)展,機(jī)器人逐漸朝著類人化、智能化方向發(fā)展,這就使得仿生學(xué)逐步發(fā)展起來,仿生學(xué)是模仿生物體的結(jié)構(gòu)和工作原理進(jìn)行機(jī)械和控制設(shè)計[1-2]的方法。其中仿人行走機(jī)器人是仿照人體結(jié)構(gòu)和運動原理設(shè)計的仿人形機(jī)器人,具有多學(xué)科交叉、技術(shù)含量高、研究和開發(fā)難度大的特點[3],正因如此,各國也將其作為國家技術(shù)發(fā)展水平的標(biāo)志。
目前仿人機(jī)器人的外形和人類比較類似,但是由于傳統(tǒng)的機(jī)器人將人體的肌肉肌腱驅(qū)動簡化成電動機(jī)加減速器安裝于關(guān)節(jié)進(jìn)行驅(qū)動,這種設(shè)計的結(jié)果導(dǎo)致機(jī)器人關(guān)節(jié)的運動不能像人體關(guān)節(jié)運動一樣靈活、自然,呈現(xiàn)機(jī)械化運動的特點[4]。對于這個問題,有不少學(xué)者提出仿照人體的驅(qū)動方式進(jìn)行機(jī)器人的關(guān)節(jié)驅(qū)動,荷蘭Delft大學(xué)的Wisse教授[5]于2003年研制出基于氣動人工肌肉驅(qū)動的準(zhǔn)被動雙足步行機(jī)器人MIKE,采用驅(qū)動人工肌肉驅(qū)動關(guān)節(jié)能夠很好地模擬人體肌肉的特性,但是由于氣體的可壓縮性會導(dǎo)致精確度降低。美國波士頓公司利用液壓驅(qū)動研制成功引起轟動的軍用機(jī)器人“Bigdog”后于2011年研發(fā)的Petman仿人機(jī)器人[6],具有負(fù)載大、速度快的特點,由于液壓驅(qū)動會帶來較大的質(zhì)量,限制了在其他方面的應(yīng)用,因此越來越多的學(xué)者開始研究利用繩索進(jìn)行驅(qū)動[7],由于繩索與人體的肌腱類似,因此采用繩索驅(qū)動關(guān)節(jié)能使得機(jī)器人的關(guān)節(jié)運動能很好地表現(xiàn)出與人體運動相類似的特征。
本文主要是通過仿照人體關(guān)節(jié)肌肉肌腱驅(qū)動方式,設(shè)計一種繩索驅(qū)動的拮抗仿生關(guān)節(jié),研究關(guān)節(jié)運動學(xué)、動力學(xué),找出繩索長度、拉力與關(guān)節(jié)轉(zhuǎn)角度的關(guān)系,在ADAMS中的Cable模塊進(jìn)行繩索驅(qū)動的仿真,以繩索的長度變化量作為驅(qū)動函數(shù),比較測量值與給定值判斷繩驅(qū)動結(jié)果的正確性。
1 拮抗仿生關(guān)節(jié)設(shè)計
1.1 關(guān)節(jié)拮抗原理與構(gòu)型選擇
由關(guān)節(jié)生物力學(xué)可知關(guān)節(jié)是人體運動的樞紐,是肌肉肌腱和骨組成的杠桿機(jī)構(gòu)的支點,在肌肉和骨的協(xié)同作用下產(chǎn)生相應(yīng)的運動[8]。關(guān)節(jié)的運動不單單是依靠一根肌肉完成驅(qū)動的,而是通過肌群來實現(xiàn)的,其中可以將驅(qū)動該關(guān)節(jié)的肌群分為兩類:一是原動肌(起主要作用)、二是協(xié)同肌(起輔助作用)[9]。兩者構(gòu)成拮抗關(guān)系,這樣在關(guān)節(jié)的運動中能夠使得運動更加平穩(wěn)自然。相對于傳統(tǒng)的驅(qū)動方式,仿生的拮抗驅(qū)動方式無需中間的傳動環(huán)節(jié),結(jié)構(gòu)更加簡單,具有轉(zhuǎn)動慣量小、關(guān)節(jié)運動靈活的特點。

圖1 繩驅(qū)動關(guān)節(jié)構(gòu)型
根據(jù)生物學(xué)仿生原理利用繩索代替肌肉肌腱為關(guān)節(jié)提供驅(qū)動力矩[10],繩索驅(qū)動的結(jié)構(gòu)構(gòu)型主要有以下幾種:
其中圖1(a)采用的是1根繩索與固定于支架處的定滑輪相連,繩索由1個獨立電動機(jī)帶動,依靠摩擦力帶動定滑輪轉(zhuǎn)動從而實現(xiàn)關(guān)節(jié)的轉(zhuǎn)動,該驅(qū)動方式能夠輸出較大轉(zhuǎn)矩,但是由于引入了摩擦力使得這種驅(qū)動方式存在不可靠因素。圖1(b)采用2根繩索在兩側(cè)構(gòu)成拮抗,關(guān)節(jié)與固定端鉸接,繩索與關(guān)節(jié)構(gòu)成杠桿關(guān)系,通過2個電動機(jī)帶動2根繩索的伸縮配合從而實現(xiàn)關(guān)節(jié)的轉(zhuǎn)動,該驅(qū)動方式利用繩索與關(guān)節(jié)固連不需要依賴摩擦力進(jìn)行驅(qū)動,結(jié)構(gòu)比較緊湊,缺點是轉(zhuǎn)動范圍較小、力臂較小,需要較大的驅(qū)動力。圖1(c)關(guān)節(jié)與固定端鉸接,2根繩索與距離關(guān)節(jié)旋轉(zhuǎn)中心一定距離的桿件相連,此種驅(qū)動方式能夠提供較大的工作空間,但是力臂較小需要的驅(qū)動力較大。圖1(d)與圖1(c)的驅(qū)動方式類似,只是繩索與桿件的連接位置不同,這種在垂直于桿件方向凸出一定長度的桿,目的是將繩索的驅(qū)動力臂放大,從而減小驅(qū)動力的大小。
1.2 關(guān)節(jié)模型的構(gòu)建
綜合考慮各種構(gòu)型的優(yōu)缺點,選用圖1(d)中的構(gòu)型,結(jié)合關(guān)節(jié)的運動范圍空間以及驅(qū)動力臂的大小設(shè)計出如圖2的繩驅(qū)動關(guān)節(jié)模型。
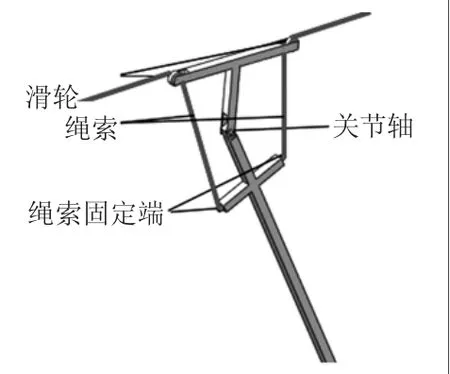
圖2 繩驅(qū)動關(guān)節(jié)模型
將模型的上半部分固定,下半部分圍繞關(guān)節(jié)軸轉(zhuǎn)動,關(guān)節(jié)軸處于中間位置,用于改變力傳遞方向的滑輪安裝于關(guān)節(jié)軸的上方兩側(cè)對稱的位置,繩索固定端安裝于關(guān)節(jié)軸下方兩側(cè)對稱位置,兩側(cè)的電動機(jī)帶動繩索牽引關(guān)節(jié)轉(zhuǎn)動。通過改變滑輪和繩索固定端與關(guān)節(jié)軸的位置實現(xiàn)不同力臂和運動范圍的關(guān)節(jié)設(shè)計。
2 關(guān)節(jié)運動學(xué)分析
關(guān)節(jié)簡化模型如圖3所示,以關(guān)節(jié)旋轉(zhuǎn)中心為原點建立坐標(biāo)系,關(guān)節(jié)轉(zhuǎn)角逆時針方向為正方向。xoy為基坐標(biāo)系,xmmmym為動坐標(biāo)系,A、B點為動點,C、D、O為固定點。
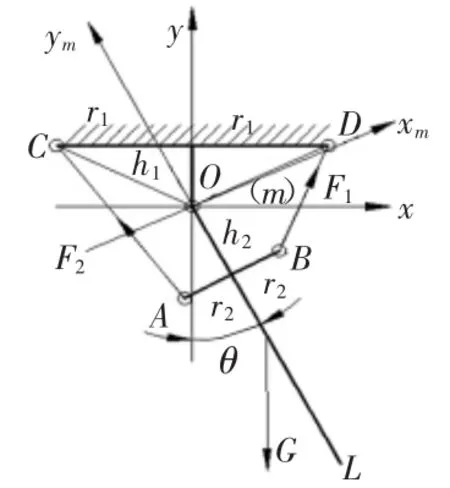
圖3 關(guān)節(jié)簡化模型
為精確給出關(guān)節(jié)轉(zhuǎn)角與繩索伸縮量關(guān)系的表達(dá)式,擺桿處于豎直狀態(tài)為初始姿態(tài),在基坐標(biāo)系中初始姿態(tài)下各點的坐標(biāo)分別為A (-r2,-h2)、B (r2,-h2)、C(-r1,h1)、D(r1,h1),關(guān)節(jié)轉(zhuǎn)角為θ,旋轉(zhuǎn)后的各點在基坐標(biāo)系的坐標(biāo)利用坐標(biāo)轉(zhuǎn)換原理[11-13]計算得:
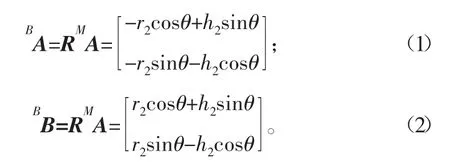
進(jìn)而能夠得到:

則可以得到兩側(cè)繩索長度與關(guān)節(jié)角度的關(guān)系:

式中:Lr表示關(guān)節(jié)右側(cè)繩索長度;Ll表示關(guān)節(jié)左側(cè)繩索長度。
3 基于ADAMS_cable模塊的仿真分析
3.1 ADAMS_cable建模原理及模型仿真
Cable是ADAMS 2013版本以后才新添加的一個插件,目的是幫助用戶快速建立繩索仿真模型,完成工程上的應(yīng)用,和以往采用套筒建立模型相比,Cable模塊具有Anchor(錨固)、Pully(滑輪)、Roller(卷筒)建模的功能,可快速進(jìn)行參數(shù)化建模。
Cable模塊把鋼絲繩離散成若干個圓球,利用軸套力進(jìn)行連接,利用廣義力將其連接起來,可以定義剛度、阻尼。軸套力的計算方程如式:

式中:F為鋼絲繩之間的受力矩陣;K、C分別為系統(tǒng)的剛度矩陣、阻尼矩陣;X分別為位移、速度矩陣;F0為初始受力矩陣[14]。建立的SolidWorks三維模型。模型的參數(shù)為r1=75 mm,r2=40 mm,h1=80 mm,h2=80 mm。將建立的三維模型另存為parasolid(x_t)格式的文件,打開ADAMS/view,點擊File菜單下Import選項,file type選擇parasolid類型,file to read中選擇要導(dǎo)入的文件路徑,在關(guān)節(jié)處設(shè)置轉(zhuǎn)動副,設(shè)置重力方向為Y軸負(fù)方向,關(guān)節(jié)桿件材料設(shè)置為鋼,模型的參數(shù)質(zhì)量為8.76kg,轉(zhuǎn)動慣量為Ixx=600.56kg·mm2,Iyy=596.64 kg·mm2,Izz=4.697 kg·mm2。之后是建立繩索模型進(jìn)行仿真,首先要得到兩側(cè)繩索長度的變化量作為驅(qū)動函數(shù),給定關(guān)節(jié)轉(zhuǎn)角為人體下肢髖關(guān)節(jié)一個步態(tài)周期的角度變化[15],利用第2節(jié)的運動學(xué)分析求解出兩側(cè)繩索的長度變化作為驅(qū)動函數(shù)。建立繩索模型,設(shè)置滑輪和接觸參數(shù)如表1。之后需要設(shè)置繩索的參數(shù)見表2。
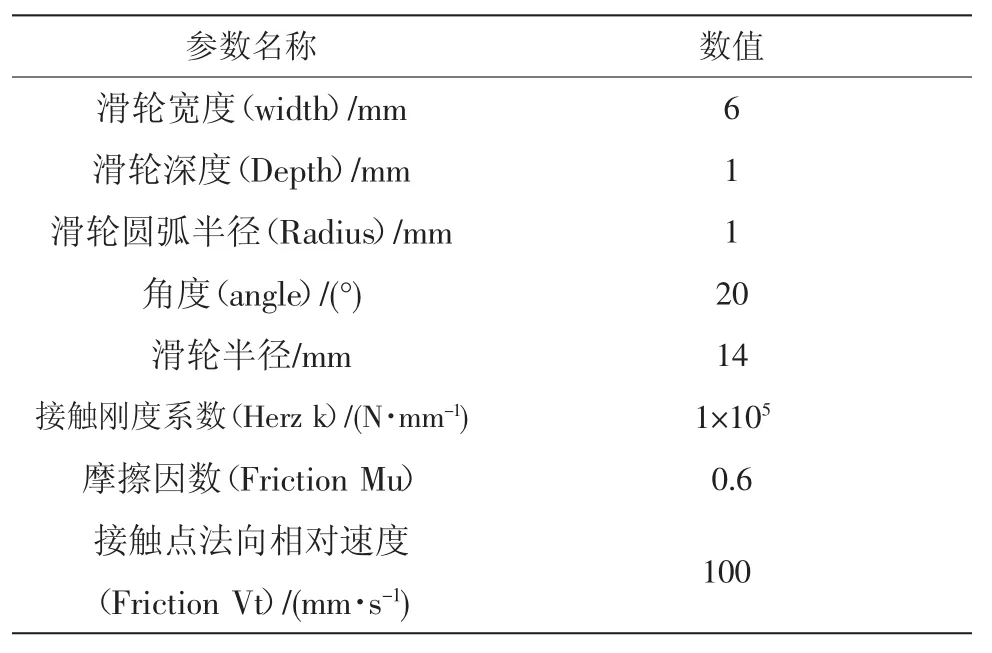
表1 滑輪幾何與接觸參數(shù)設(shè)置
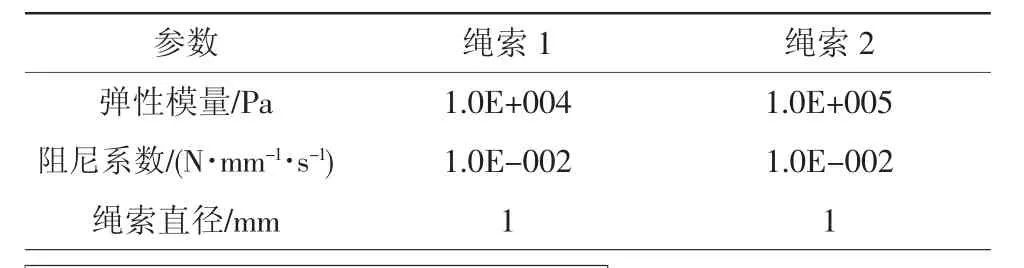
表2 繩索參數(shù)設(shè)置
圖4 繩索仿真模型
建立繩索模型如圖5,圖中右側(cè)為繩索1,左側(cè)為繩索2。將仿真時間設(shè)為10 s,步長設(shè)為500步,開始進(jìn)行仿真。
3.2 ADAMS仿真結(jié)果分析
仿真結(jié)果如圖5所示,其中θ為關(guān)節(jié)測量的關(guān)節(jié)角度變化,F(xiàn)1、F2分別為右側(cè)和左側(cè)繩索拉力的變化,在0~3.5 s和6.5~10 s時間段內(nèi),主要是F1起作用,F(xiàn)2拉力變化較小,0~3.5 s時間段內(nèi)由于關(guān)節(jié)角度是正向逐漸減小的所以F1先是迅速增大到100 N之后是逐漸減小到0 N,6.5~10 s時間段內(nèi)關(guān)節(jié)角度是正向逐漸增大的,所以F1是由0 N逐漸恢復(fù)到100 N,在3.5~6.5 s之間關(guān)節(jié)角度是反向增大的,這時F1不再提供拉力,F(xiàn)2則是呈現(xiàn)先增大后減小的變化形式。
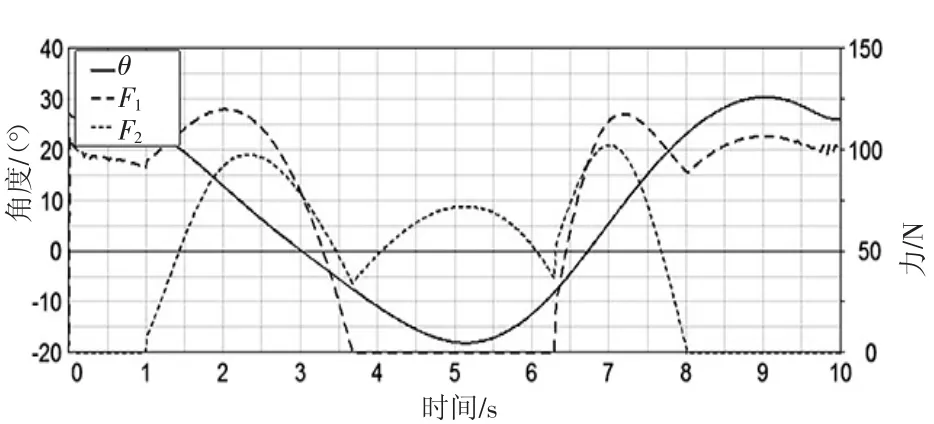
圖5 測量結(jié)果
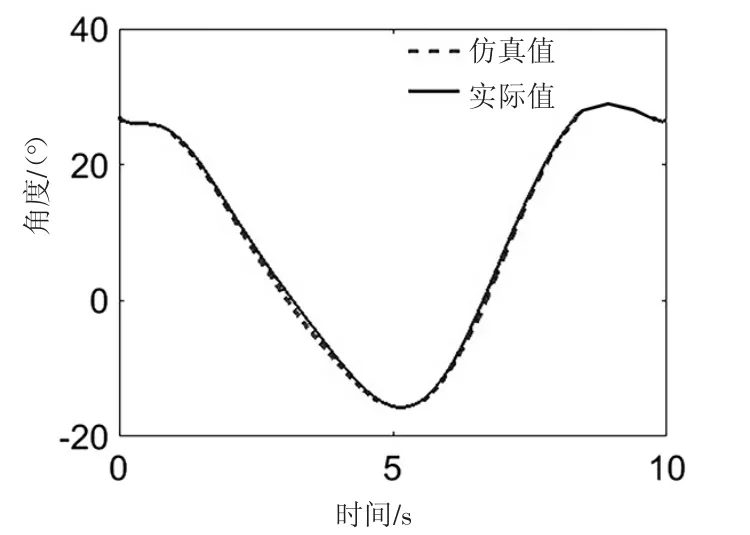
圖6 結(jié)果對比
為檢驗繩驅(qū)動的正確性需要將仿真關(guān)節(jié)轉(zhuǎn)角與給定實際關(guān)節(jié)轉(zhuǎn)角進(jìn)行對比,如圖6所示,虛線表示仿真值,實線表示實際值。從圖6中可以看出兩者的相似度較高幾乎完全重合。由仿真結(jié)果可知,繩索彈性模量越大,則繩索拉力越大,關(guān)節(jié)角的最低點位置會低于正常值。相反,繩索的彈性模量太小,則繩索的拉力較小,會導(dǎo)致關(guān)節(jié)角的最低點位置高于正常值,所以選擇合適的彈性模量是繩索仿真成功的關(guān)鍵。
4 結(jié)論
本文通過仿照人體拮抗肌肉設(shè)計一種基于繩索驅(qū)動的仿生關(guān)節(jié),該關(guān)節(jié)具有工作空間大、力臂較大的特點,通過建立的運動學(xué)、動力學(xué)模型得到關(guān)節(jié)轉(zhuǎn)角與兩側(cè)繩索長度和拉力的關(guān)系,利用ADAMS中的cable模塊建立繩索的仿真模型,以繩索的長度變化為驅(qū)動進(jìn)行仿真,仿真結(jié)果表明,繩索驅(qū)動能夠準(zhǔn)確驅(qū)動關(guān)節(jié)轉(zhuǎn)角,同時能夠測得兩側(cè)拉力所需要的拉力大小。本研究對于機(jī)器人的關(guān)節(jié)的設(shè)計與繩索驅(qū)動的研究具有一定的借鑒意義。
[參 考 文 獻(xiàn)]
[1] 于海濤,郭偉.基于氣動肌腱驅(qū)動的拮抗仿生關(guān)節(jié)設(shè)計與控制[J].機(jī)械工程學(xué)報,2012,48(17):1-9.
[2] 譚民,王碩.機(jī)器人技術(shù)研究進(jìn)展[J].自動化學(xué)報,2013,39(7):963-973.
[3] 李允明.國內(nèi)外仿人機(jī)器人發(fā)展概況[J].機(jī)器人,2005,27(6):561-569.
[4] 應(yīng)申舜,秦現(xiàn)生,任振國,等.基于人工肌肉的機(jī)器人驅(qū)動關(guān)節(jié)設(shè)計與研究[J].機(jī)器人,2008,30(2):142-146.
[5] WISSE M,VAN FRANKENHUYZEN J.Design and construction of MIKE;a 2-Dautonomous biped based on passive dynamic walking [M]//Adaptive motion of animals and machines.Springer,2006:143-154.
[6] HUDYJAYA J,MIR-NASIRI N.Development of Minimalist Bipedal Walking Robot with Flexible Ankle and Split-mass Balancing Systems[J].International Journal of Automation and Computing,2013,10(5):425-437.
[7] 桑秀鳳,陳筍.繩驅(qū)動并聯(lián)機(jī)器人繩索拉力及工作空間求解[J].應(yīng)用科技,2014,41(4):51-56.
[8] 姜海波.人體下肢關(guān)節(jié)系統(tǒng)的生物力學(xué)行為研究[D].徐州:中國礦業(yè)大學(xué),2008.
[9] 馬全超.基于拮抗原理的致動原件設(shè)計[D].上海:上海交通大學(xué),2012.
[10]劉攀.繩索牽引機(jī)器人及虛擬重力系統(tǒng)研究[D].哈爾濱:哈爾濱工程大學(xué),2010.
[11] 王斌銳,李璟.運動學(xué)建模與控制系統(tǒng)設(shè)計[M].北京:清華大學(xué)出版社,2014.
[12]張立勛,王克義.繩索牽引康復(fù)機(jī)器人控制及仿真研究[J].智能系統(tǒng)學(xué)報,2008,3(1):51-57.
[13]李冉.柔索驅(qū)動并聯(lián)機(jī)器人的建模與控制[D].太原:太原科技大學(xué),2015.
[14] 郭衛(wèi)東,李守忠.ADAMS2013應(yīng)用實例精解教程[M].北京:機(jī)械工業(yè)出版社,2015.
[15]陳洋.基于人體運動規(guī)律和足部特性的仿人機(jī)器人行走運動研究[D].合肥:合肥工業(yè)大學(xué),2016.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19