基于軟件設(shè)計的空間望遠鏡主鏡力促動器控制系統(tǒng)
2018-05-26 01:49:31韓雪曹小濤楊維帆
長春理工大學學報(自然科學版) 2018年2期
韓雪,曹小濤,楊維帆
(中國科學院長春光學精密機械與物理研究所,長春 130033)
望遠鏡的口徑越大,其集光能力越強、分辨能力越高,獲取天體信息的能力也越強,越有利于航空航天、現(xiàn)代天文、國防軍事等領(lǐng)域的深入發(fā)展。隨著望遠鏡口徑的增大,主鏡重力變形和熱變形問題尤為突出,嚴重影響成像質(zhì)量。傳統(tǒng)的被動支撐方式很難保證主鏡的面形精度,因此主動光學技術(shù)迅速發(fā)展并逐漸成熟[1]。目前大口徑望遠鏡大多采用了主動光學技術(shù)[2],通過檢測望遠鏡的波前像差,利用主鏡背后的力促動器來實現(xiàn)復雜外界因素下主鏡的面形保持或校正,使望遠鏡始終保持優(yōu)良的成像質(zhì)量[3,4]。
在主動光學中,力促動器是定位支撐機構(gòu),也是校正鏡面面形的執(zhí)行機構(gòu)[5-8]。力促動器要保證具有促動精度高、線性度好、響應(yīng)速率快和運動平滑的特點[9,10]。因此開發(fā)一種滿足上述要求的力促動器控制軟件具有重要意義。
本文設(shè)計了力促動器的控制系統(tǒng),該控制系統(tǒng)采用PID控制算法實現(xiàn)力與位移雙閉環(huán)控制,由上位機軟件實現(xiàn)系統(tǒng)控制。其中,力促動器采用了結(jié)構(gòu)簡單的電機和絲杠結(jié)構(gòu),作為空間望遠鏡主鏡面形校正的執(zhí)行機構(gòu)。該控制系統(tǒng)包括機械傳動機構(gòu)、驅(qū)動控制系統(tǒng)和反饋環(huán)節(jié)三大部分。最后對所設(shè)計的力促動器控制系統(tǒng)的可靠性和有效性進行了實驗驗證。
1 力促動器控制系統(tǒng)
1.1 系統(tǒng)設(shè)計方案
空間望遠鏡系統(tǒng)中常用的力促動器主要有機電式、液壓式和氣動式三種[11]。液壓式力促動器輸出力大,減速比高,但實際操作過程中存在液體泄漏造成主鏡污染的危險。氣動式力促動器結(jié)構(gòu)簡單,無污染,速度快,但控制復雜,低速穩(wěn)定性差。機電式力促動器響應(yīng)速度快,控制精度高,但易受電源電壓、頻率變化的影響。結(jié)合實際情況和項目實驗要求,本文采用了電機+絲桿的機電式力促動器結(jié)構(gòu)。
本文設(shè)計的力促動器控制系統(tǒng)包括機械傳動機構(gòu)、驅(qū)動控制系統(tǒng)和反饋環(huán)節(jié)三大部分。圖1為力促動器控制系統(tǒng)組成結(jié)構(gòu)。機械傳動結(jié)構(gòu)主要由減速器、聯(lián)軸節(jié)、螺母絲杠、導向裝置等組成。驅(qū)動控制系統(tǒng)包括直流電機、驅(qū)動器和控制軟件。力傳感器與編碼器實現(xiàn)反饋控制。
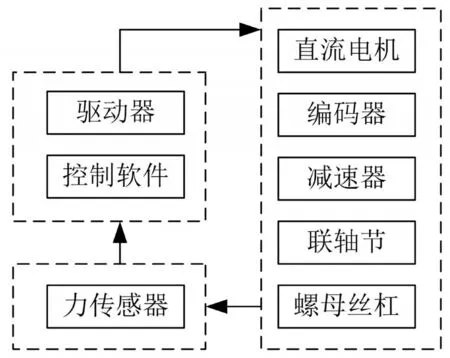
圖1 力促動器控制系統(tǒng)組成結(jié)構(gòu)
圖2為力促動器系統(tǒng)硬件實驗環(huán)境。直流電機采用MAXON公司的型號為EC-I 40系列的無刷直流電機;編碼器為1024線增量式編碼器;采集卡為NI公司的型號為NITB4330,集成24bitA/D,轉(zhuǎn)換范圍±25mV,力的分辨率為0.15mN/bit;驅(qū)動器采用MAXON公司的型號為EPOS2 24/5的驅(qū)動器;力傳感器采用HBN公司的型號為S9M,測量范圍±500N,分辨率0.02mV/N;NI半實物仿真平臺負責力的采集、上位機軟件編程實現(xiàn)、力閉環(huán)控制算法實現(xiàn),與電機驅(qū)動器進行通信。
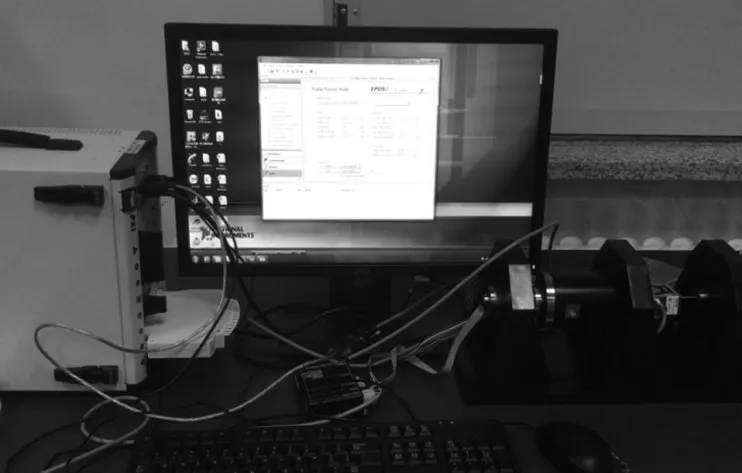
圖2 力促動器硬件實驗環(huán)境
1.2 控制器設(shè)計原理
圖3為控制器原理圖。fd表示控制系統(tǒng)給定的力值,xd表示內(nèi)環(huán)給定的位移,x表示內(nèi)環(huán)輸出的位移,f表示力促動器控制系統(tǒng)輸出的外力,G1(s)表示外環(huán)力環(huán)控制器的傳遞函數(shù),G2(s)表示內(nèi)環(huán)位置環(huán)控制器的傳遞函數(shù),G3(s)表示執(zhí)行器的傳遞函數(shù),G4(s)表示傳動機構(gòu)的傳遞函數(shù)。

圖3 控制器設(shè)計原理圖
由于力促動器控制系統(tǒng)設(shè)計時,內(nèi)環(huán)帶寬可以設(shè)計為遠大于外環(huán)帶寬,因此在恰當設(shè)計內(nèi)環(huán)位置環(huán)控制器G2(s)后,在帶寬低頻范圍內(nèi),可以認為xd等于x,上圖等效為圖4。
恰當設(shè)計力環(huán)控制器G1(s),即可保證t→∞,f→fd,即力促動器控制系統(tǒng)輸出力值趨近于給定力值。
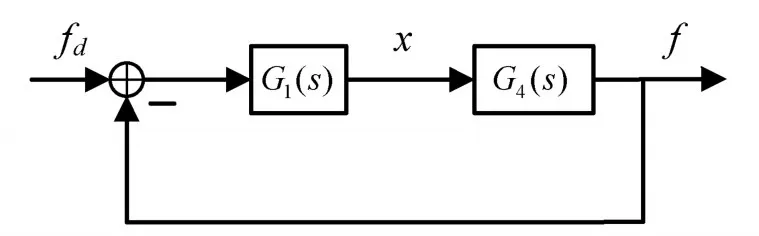
圖4 控制器設(shè)計簡化圖
1.3 系統(tǒng)工作原理
本系統(tǒng)采用了外環(huán)力環(huán)與內(nèi)環(huán)位移環(huán)控制方法,其對應(yīng)的力環(huán)控制器與位置環(huán)控制器均由上位機軟件實現(xiàn)。
系統(tǒng)工作時,上位機接收到主鏡面形校正所需的期望值,力環(huán)控制器將期望值與力傳感器反饋的測量值進行比較,經(jīng)控制算法校正處理后,發(fā)送控制信號至位置環(huán)控制器。位置環(huán)控制器對接收到的控制信號與編碼器輸出的旋轉(zhuǎn)角度信號進行比較,經(jīng)控制算法校正處理后,發(fā)送控制信號至電機驅(qū)動器,電機驅(qū)動器輸出驅(qū)動電壓信號控制直流電機旋轉(zhuǎn)。電機作為執(zhí)行機構(gòu),主要提供旋轉(zhuǎn)扭力,通過聯(lián)軸節(jié)驅(qū)動減速器帶動精密絲杠轉(zhuǎn)動,絲杠將旋轉(zhuǎn)運動轉(zhuǎn)換為螺母的直線運動,產(chǎn)生直線方向的拉力或者壓力。與此同時,上位機軟件平臺實時顯示力傳感器反饋的校正力測量值,并對測量值進行存儲。
2 軟件設(shè)計
2.1 PID控制算法
PID控制算法可靠性高、算法簡單、魯棒性好、參數(shù)整定方便,廣泛應(yīng)用于工程實際中。PID控制算法根據(jù)給定值與實際輸出值構(gòu)成偏差值,將偏差值的比例、積分和微分通過線性組合構(gòu)成控制量,對控制對象進行控制。
PID算法表達式為:

式中,Kp為比例系數(shù),TI為積分時間常數(shù),TD為微分時間常數(shù),u(t)為輸出的控制量,e(t)為偏差信號。
工程上PID參數(shù)的整定方法主要有臨界比例度法、過渡過程響應(yīng)法、試湊法等。本文采用試湊法來確定PID參數(shù),通過控制系統(tǒng)的閉環(huán)測試結(jié)果,反復調(diào)節(jié)PID參數(shù),來確定最終參數(shù)值。經(jīng)過反復實驗,得到位置環(huán)參數(shù)為P位=2.5、I位=0、D位=0.5,力環(huán)參數(shù)為P力=3、I力=0.35、D力=0,此時控制精度較理想。
2.2 軟件設(shè)計
軟件設(shè)計時,要滿足以下三方面的需求:
(1)穩(wěn)定性需求:要求軟件系統(tǒng)在工作時具有穩(wěn)定性,在控制系統(tǒng)發(fā)生故障和校正力測量值超出閾值時,能夠及時、可靠的處理,使控制系統(tǒng)快速恢復到正常狀態(tài),確保實驗環(huán)境安全可靠。
(2)實時性需求:校正力期望值發(fā)送后,及時接收校正力測量值,期望值與測量值經(jīng)過控制算法處理后,輸出控制信號,整個過程要保證實時性。
(3)擴展性需求:隨著項目要求的變化,軟件系統(tǒng)后期可能需要進行相應(yīng)的修改和完善,例如增加新的功能模塊、控制算法的更改,因此,軟件設(shè)計上要考慮方便進行修改和維護的需求。
軟件設(shè)計基于LabWindows語言,圖5為上位機界面。用戶界面包括力信號采集通道選擇、采樣頻率設(shè)置、采集卡參數(shù)設(shè)置、力傳感器參數(shù)設(shè)置、校正力期望值讀入、校正力測量值保存、數(shù)據(jù)顯示、力促動器位移與力值上升時間測量等。
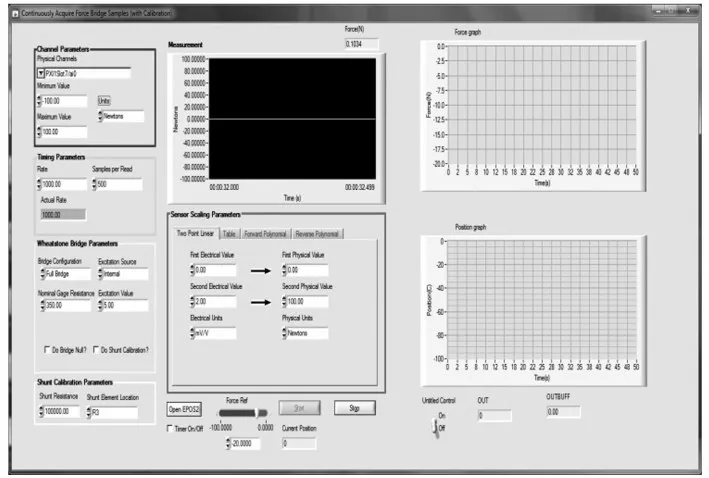
圖5 上位機界面
圖6為一個執(zhí)行周期的系統(tǒng)軟件流程圖,系統(tǒng)上電后,初始化配置,設(shè)置系統(tǒng)定時中斷,中斷到來時,根據(jù)力給定值和測量值計算力控制誤差,若誤差大于零,電機正轉(zhuǎn),如誤差小于零,電機反轉(zhuǎn),力控制算法對誤差進行校正。

圖6 軟件流程圖
3 力促動器性能測試
為了驗證所設(shè)計的力促動器控制系統(tǒng)性能,進行了一系列測試,主要包括開環(huán)線性度測試、力穩(wěn)態(tài)精度測試、控制系統(tǒng)抗干擾能力測試,以及系統(tǒng)階躍響應(yīng)測試。
3.1 線性度測試
在±200N測量行程內(nèi),測試系統(tǒng)開環(huán)狀態(tài)下,系統(tǒng)輸出的線性度。上位機發(fā)送位移指令,力傳感器反饋輸出力值。測試結(jié)果如圖7所示。由圖7可知,在測試范圍內(nèi),系統(tǒng)輸出是線性的。
3.2 力穩(wěn)態(tài)精度測試
表1為系統(tǒng)閉環(huán)狀態(tài)下,一組力穩(wěn)態(tài)精度測試結(jié)果。經(jīng)多次測試,結(jié)果表明±50N輸出力范圍內(nèi),力的穩(wěn)態(tài)精度優(yōu)于50mN,均方根誤差為0.0298N。
3.3 抗干擾能力測試
力促動器不僅要準確地輸出指定的力值,還要具有良好的抗干擾能力,力促動器系統(tǒng)的穩(wěn)定性關(guān)系到整個主動光學系統(tǒng)穩(wěn)定性。
當力促動器的輸出力穩(wěn)定時,對其施加外力進行干擾。圖8所示是壓力為10N時的抗干擾試驗結(jié)果。從力變化曲線可以看出,力促動器未出現(xiàn)振蕩等不穩(wěn)定的情況,系統(tǒng)能夠有效克服外界干擾,快速恢復到穩(wěn)定值,使輸出力保持穩(wěn)定。
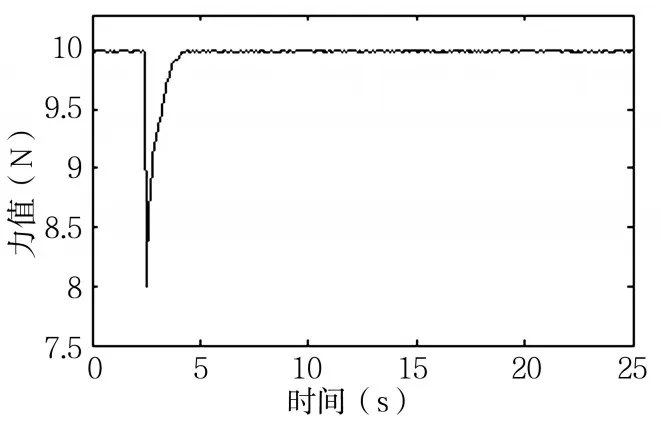
圖8 抗干擾測試結(jié)果
3.4 系統(tǒng)階躍響應(yīng)測試
在初值為0時,分別進行了1N和10N的階躍響應(yīng)測試,測試結(jié)果如圖9和圖10所示。結(jié)果表明,輸出力上升時間均在3s之內(nèi),并且系統(tǒng)超調(diào)量很小。
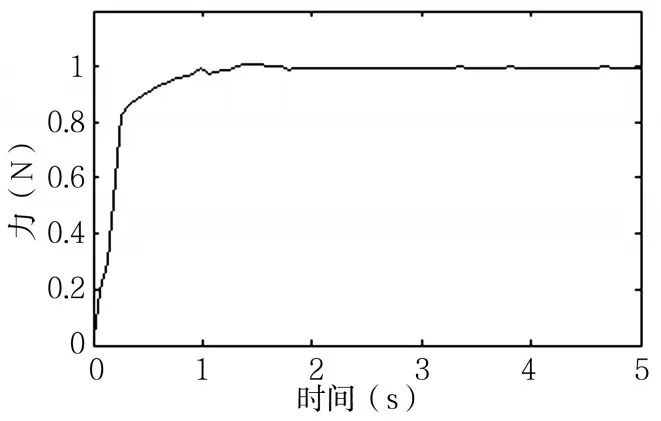
圖9 輸出1N力值時階躍響應(yīng)測試

圖10 輸出10N力值時階躍響應(yīng)測試
4 結(jié)論
本文設(shè)計了基于上位機軟件的空間望遠鏡主鏡力促動器控制系統(tǒng)。控制策略為基于PID控制算法的力與位移雙閉環(huán)控制,由LabWindows軟件實現(xiàn)。測試結(jié)果表明,在±200N測量行程內(nèi),該系統(tǒng)具有良好的線性度和響應(yīng)特性,穩(wěn)態(tài)精度優(yōu)于0.05 N,系統(tǒng)抗干擾能力強,滿足項目對主鏡力促動器控制系統(tǒng)的要求。
參考文獻
[1] Wolf E.Progress in optics[M].Elsevier Press,2002.
[2] Gerard T B.The scaling relationship between telescope cost and aperture size for very large telescopes[J].SPIE,2004(5489):563-568.
[3] 戴曉霖,鮮浩,唐金龍,等.8m能動薄主鏡側(cè)支撐設(shè)計[J].光學學報,2015,35(6):622004-1-622004-6.
[4] 胡佳寧,董吉洪,周平偉.地基大口徑望遠鏡主鏡主動支撐系統(tǒng)綜述[J].激光與紅外,2017,47(1):5-12.
[5] 李劍鋒,吳小霞,邵亮.大口徑SiC主鏡主動支撐研究及促動器設(shè)計[J].紅外與激光工程,2016,45(7):13-18.
[6] 余正洋,李國平.用于主動光學的氣體力促動器設(shè)計[J].液壓與氣動,2011(1):80-85.
[7] 彭堯,張景旭,楊飛,等.基于主動光學的大口徑反射鏡硬點定位技術(shù)[J].激光與紅外,2016,46(2):139-144.
[8] Richard Bennett,F(xiàn)red Baine.Active Mirror Support Using Pneumatic Actuators[J].SPIE,2004(5497):91-102.
[9] 張麗敏,張斌,楊飛,等.主動光學系統(tǒng)力促動器的設(shè)計和測試[J].光學精密工程,2012,20(1):38-44.
[10] 吳小霞,李劍鋒,宋淑梅,等.4mSiC輕量化主鏡的主動支撐系統(tǒng)[J].光學精密工程,2014,22(9):2451-2457.
[11] 李國平,苗新利.一種微位移促動器的設(shè)計和檢測[J].光學精密工程,2005,13(3):332-338.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17