機(jī)載攝錄設(shè)備用于海上水柱偏差測(cè)量方法研究
2018-05-26 01:49:57齊鳳梅江雷
關(guān)鍵詞:測(cè)量
齊鳳梅,江雷
(92941部隊(duì)91分隊(duì),葫蘆島 125000)
艦炮對(duì)海射擊時(shí),需要測(cè)量水柱偏差來(lái)判定射擊的命中概率。高彈道反艦導(dǎo)彈俯沖攻擊靶船時(shí),如果不能直接命中靶船,同樣需要測(cè)量水柱偏差。傳統(tǒng)的陸基光學(xué)交會(huì)和雷達(dá)單站測(cè)量彈丸或水柱的方法,因受布站和作用距離限制,測(cè)量精度低,無(wú)法滿足水柱偏差測(cè)量要求;艦載裝備交會(huì)或單站測(cè)量,受艦艇搖擺影響難以跟蹤彈丸,也無(wú)法精確測(cè)量水柱位置。因此,水柱偏差測(cè)量一直以來(lái)是靶場(chǎng)測(cè)控的瓶頸問(wèn)題,直接制約了海上試驗(yàn)鑒定能力,必須尋求新的測(cè)量方法,實(shí)現(xiàn)艦炮對(duì)海射擊水柱偏差測(cè)量的難題。
為完成海上中靶圖像獲取任務(wù),靶場(chǎng)研制了攝錄型無(wú)人機(jī),并先后完成了導(dǎo)彈俯沖攻擊靶船和艦炮對(duì)海射擊的圖像攝錄任務(wù)。基于該型無(wú)人機(jī)攝錄圖像的水柱偏差測(cè)量方法,可解決水柱偏差測(cè)量問(wèn)題,且方法可靠,實(shí)現(xiàn)方便,測(cè)量精度較高。
1 攝錄型無(wú)人機(jī)相關(guān)技術(shù)指標(biāo)
無(wú)人機(jī)飛行高度:≤5000m;
最大飛行速度:≥150m/s;
最小盤旋半徑:≤1000m;
GPS定位精度:≤5m;
相機(jī)視場(chǎng)角:36°×27°~1.8°×1.35°;
相機(jī)分辨率:768×576;
相機(jī)變焦:≥20倍;
相機(jī)像元尺寸:30μm。
2 傳統(tǒng)基于共面基準(zhǔn)點(diǎn)標(biāo)校測(cè)量方案
靶場(chǎng)海上測(cè)量環(huán)境不理想,只有一臺(tái)相機(jī),不能進(jìn)行交會(huì)測(cè)量。無(wú)人機(jī)上的相機(jī)是變焦距鏡頭,因而不能在地面完成相機(jī)標(biāo)校。針對(duì)圖像的標(biāo)校測(cè)量,國(guó)內(nèi)外已有很多學(xué)者進(jìn)行研究[1],但是相機(jī)畸變校正大大增加了算法的復(fù)雜度,而且所需矩陣初值不易確定,不適用海上靶場(chǎng)特定應(yīng)用。針對(duì)靶場(chǎng)試驗(yàn)情況,可行的測(cè)量方法是共面基準(zhǔn)點(diǎn)測(cè)量。
共面基準(zhǔn)點(diǎn)標(biāo)校測(cè)量方法是:解4個(gè)以上共面基準(zhǔn)點(diǎn)的共線方程組得出相機(jī)內(nèi)外參數(shù)矩陣,再將目標(biāo)的像素坐標(biāo)代入共線方程組解算目標(biāo)位置。該方法的優(yōu)點(diǎn)是不依賴平臺(tái)自身的位置姿態(tài),就可以實(shí)現(xiàn)對(duì)水柱位置的可靠測(cè)量。具體過(guò)程如下:
2.1 共面基準(zhǔn)點(diǎn)標(biāo)校測(cè)量方法
2.1.1 物點(diǎn)成像投影關(guān)系
根據(jù)理想的小孔成像模型[2],透鏡成像關(guān)系中物點(diǎn)、像點(diǎn)對(duì)應(yīng)位置關(guān)系如圖1所示,為完成世界坐標(biāo)物點(diǎn)坐標(biāo)與相機(jī)坐標(biāo)的轉(zhuǎn)換建立以下幾個(gè)坐標(biāo)系[3-4]:
(1)像機(jī)坐標(biāo)系Oc-XYZ,以相機(jī)光心為原點(diǎn),以垂直于圖像平面的相機(jī)光軸為Zc軸,Xc軸和Yc軸平行于圖像平面;
(2)圖像像素坐標(biāo)系O-XY,在像素平面內(nèi),X、Y軸分別與Xc、Yc軸平行;
(3)物體的三維世界坐標(biāo)系Ow-XYZ,用戶自定義。
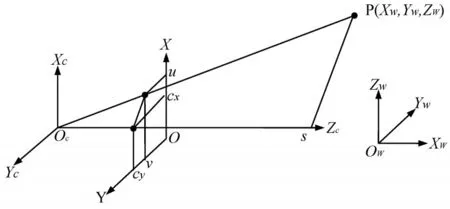
圖1 相機(jī)成像示意圖
透鏡成像中物點(diǎn)、像點(diǎn)、光心三點(diǎn)共線的共線方程如下:

或者:
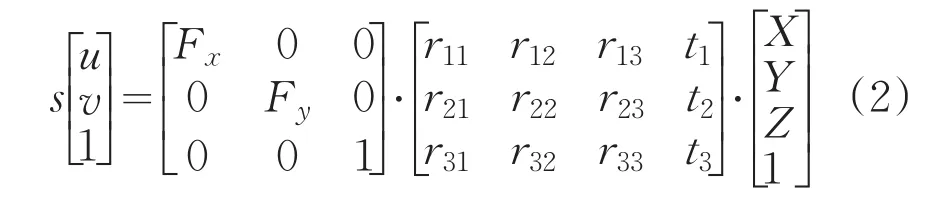
式中,(X,Y,Z)是一個(gè)物點(diǎn)的世界坐標(biāo);(u,v)是該物點(diǎn)投影在圖像平面的坐標(biāo),以像素為單位;(cx,cy)是基準(zhǔn)點(diǎn)(通常在圖像的中心);fx,fy是以像素為單位的焦距值;s是物點(diǎn)到光心的距離在光軸上的投影,s≠0。
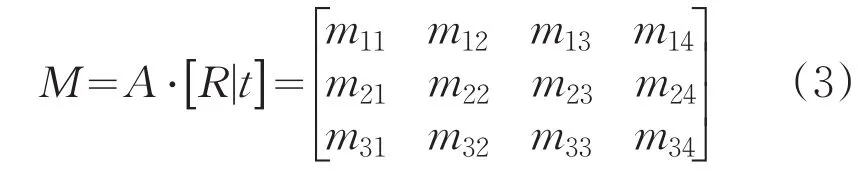
矩陣A被稱作攝像機(jī)矩陣,或者內(nèi)參數(shù)矩陣,矩陣[R|t]被稱作外參數(shù)矩陣,它是一個(gè)旋轉(zhuǎn)-平移矩陣,R是旋轉(zhuǎn)矩陣,是單位正交矩陣,t是平移矩陣,分別表示相機(jī)坐標(biāo)系相對(duì)于世界坐標(biāo)系的旋轉(zhuǎn)關(guān)系和平移量。
將投影矩陣A·[ ]R|t展開得到矩陣M:
2.1.2 解共面基準(zhǔn)點(diǎn)方程組求解投影矩陣
靶場(chǎng)測(cè)量時(shí),世界坐標(biāo)系原點(diǎn)選在靶船中心,X軸水平指向船艏,Z軸豎直向上,建立右手坐標(biāo)系,在靶船上設(shè)置6個(gè)的基準(zhǔn)點(diǎn),測(cè)量出每個(gè)基準(zhǔn)點(diǎn)坐標(biāo)(X,Y,Z),每個(gè)基準(zhǔn)點(diǎn)Z坐標(biāo)均為0,將Z=0代入方程,對(duì)投影矩陣進(jìn)行簡(jiǎn)化移項(xiàng)。得到齊次共線方程:

4個(gè)基準(zhǔn)點(diǎn)坐標(biāo)(X,Y)和像點(diǎn)坐標(biāo)(u,v)簡(jiǎn)化的得到8個(gè)方程,解算出部分參數(shù)比例關(guān)系,再利用旋轉(zhuǎn)矩陣R的單位正交性就可以計(jì)算出全部?jī)?nèi)外參數(shù)矩陣。
2.1.3 解算目標(biāo)位置
矩陣M中的所有元素都在前一步中計(jì)算出來(lái),將u、v、Z視為已知數(shù),則公式(4)就成為關(guān)于X、Y的二元一次方程組,解這一方程組就能得目標(biāo)點(diǎn)大地坐標(biāo)(X,Y)。
由于靶船基準(zhǔn)點(diǎn)相對(duì)海面高度是固定的,試驗(yàn)前已經(jīng)測(cè)量得到,如靶船甲板距水面1m,則Z=-1m,對(duì)圖像判讀得到水柱中心像素坐標(biāo)u、v,帶入X、Y的計(jì)算公式得到水柱的位置坐標(biāo),完成水柱偏差的測(cè)量。
2.2 測(cè)量精度仿真分析
相機(jī)分辨率為768×576,觀測(cè)范圍約400×400m2,飛機(jī)高度1000m,距離靶船水平距離2000m,靶船長(zhǎng)70m,寬15m,在靶船甲板上設(shè)置6個(gè)標(biāo)志點(diǎn)。在上述攝錄條件下,確定相機(jī)視場(chǎng)角度,生成理想的投影矩陣,計(jì)算基準(zhǔn)點(diǎn)和目標(biāo)點(diǎn)的像素坐標(biāo)。給基準(zhǔn)點(diǎn)位置加上0.05m的隨機(jī)誤差,給像素坐標(biāo)位置加上2個(gè)像素的隨機(jī)誤差。用帶誤差的像素坐標(biāo)進(jìn)行標(biāo)校計(jì)算得到目標(biāo)位置,與理論值比較得到水柱偏差的測(cè)量誤差。仿真計(jì)算結(jié)果如圖2所示。
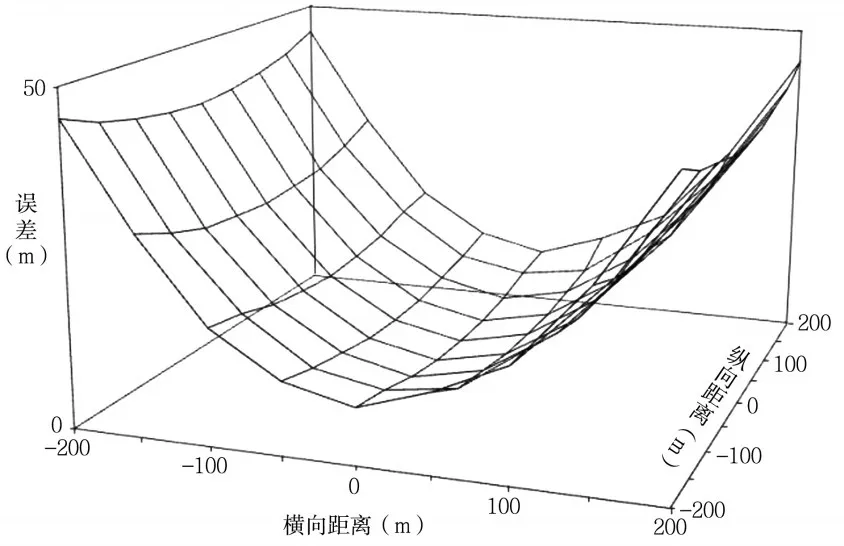
圖2 水柱位置測(cè)量誤差仿真結(jié)果
圖2看出在靶船附近誤差較小,誤差隨著距離的增加而增大,靶船艏艉線方向增加較小,橫向誤差很大,尤其是視場(chǎng)邊緣誤差接近50m。對(duì)測(cè)量誤差產(chǎn)生原因進(jìn)行分析[8-9],因?yàn)榘写挥?5m寬,基準(zhǔn)點(diǎn)橫向距離較近。由于測(cè)量方法中沒有考慮光軸中心位置誤差以及靶船晃動(dòng)等因素,因而實(shí)際測(cè)量誤差可能會(huì)更大些。當(dāng)靶船縱搖幅度
3 新標(biāo)校測(cè)量方案
為解決橫向測(cè)量誤差過(guò)大問(wèn)題,標(biāo)校測(cè)量方法需要進(jìn)行改進(jìn)。改進(jìn)后的新方法首先標(biāo)定相機(jī)內(nèi)參數(shù),然后根據(jù)圖像坐標(biāo)和相機(jī)內(nèi)參數(shù)確定無(wú)人機(jī)、靶船及水柱的空間幾何關(guān)系,解立體幾何計(jì)算出水柱偏差。相機(jī)標(biāo)校分為兩步進(jìn)行,第一步在地面標(biāo)定像面參數(shù),第二步在相機(jī)狀態(tài)固定后飛行過(guò)程中標(biāo)定相機(jī)其它內(nèi)參數(shù)。在無(wú)人機(jī)標(biāo)校與執(zhí)行水柱偏差測(cè)量過(guò)程中,要求相機(jī)焦距保持固定不變。
3.1 相機(jī)內(nèi)參數(shù)標(biāo)校方法
3.1.1 地面標(biāo)校
地面標(biāo)校目標(biāo)是要計(jì)算出相機(jī)在x、y兩個(gè)方向上像素間距大小dx、dy。相機(jī)變倍過(guò)程中,是相機(jī)光學(xué)系統(tǒng)改變變化,CCD像面是始終固定不變。dx、dy進(jìn)行一次標(biāo)校后,結(jié)果可以長(zhǎng)期使用。
地面標(biāo)校方法與2.1中的標(biāo)定方法相同,要求基準(zhǔn)點(diǎn)在相機(jī)視場(chǎng)中均勻分布,解算出相機(jī)內(nèi)參數(shù)矩陣A,得到fx、fy等數(shù)據(jù)。根據(jù)定義可知,相機(jī)焦距f與fx、fy關(guān)系為:

式中,f為光學(xué)系統(tǒng)焦距;dx、dy分別為像素間隔距離。
CCD相機(jī)像素尺寸標(biāo)稱值為30μm,令dx=30μm,則:dy=fx/fy·dx。
為便于計(jì)算將dx用相機(jī)標(biāo)稱值固定下來(lái),因?yàn)樵谙鄼C(jī)成像關(guān)系中,dx不準(zhǔn),則f、dy等隨之相應(yīng)改變,最終造成像素平面與實(shí)際像平面之間有一個(gè)平移量,即不影響相機(jī)成像共線關(guān)系,也不影響最終計(jì)算結(jié)果。
3.1.2 飛行標(biāo)校
飛行標(biāo)校是標(biāo)定相機(jī)的焦距f、光軸中心像素坐標(biāo)(x0、y0)等數(shù)據(jù),與地面標(biāo)定結(jié)果dx、dy一起就得到完整的相機(jī)內(nèi)參數(shù)矩陣。對(duì)于變倍光學(xué)系統(tǒng),焦距和視軸中心在變倍過(guò)程中都會(huì)改變,因此需要在標(biāo)校與水柱偏差測(cè)量的飛行過(guò)程保持焦距不變。
標(biāo)校方法是:在靶船艏艉線兩端各設(shè)置一個(gè)基準(zhǔn)點(diǎn),試驗(yàn)前準(zhǔn)確測(cè)量?jī)蓚€(gè)基準(zhǔn)點(diǎn)的實(shí)際距離,以保證標(biāo)校精度。飛行標(biāo)校先進(jìn)行單畫幅相機(jī)焦距計(jì)算,再進(jìn)行多畫驗(yàn)算。
(1)單畫面相機(jī)焦距計(jì)算
如圖3所示,坐標(biāo)系建立與2.1相同,P(Xw1,Yw1,Zw1)、Q(Xw2,Yw2,Zw2)是靶船上的兩個(gè)基準(zhǔn)點(diǎn),PQ兩點(diǎn)在像素平面內(nèi)分別成像在U、V上,U、V兩點(diǎn)像素坐標(biāo)分別為(x1,y1)(x2,y2)。
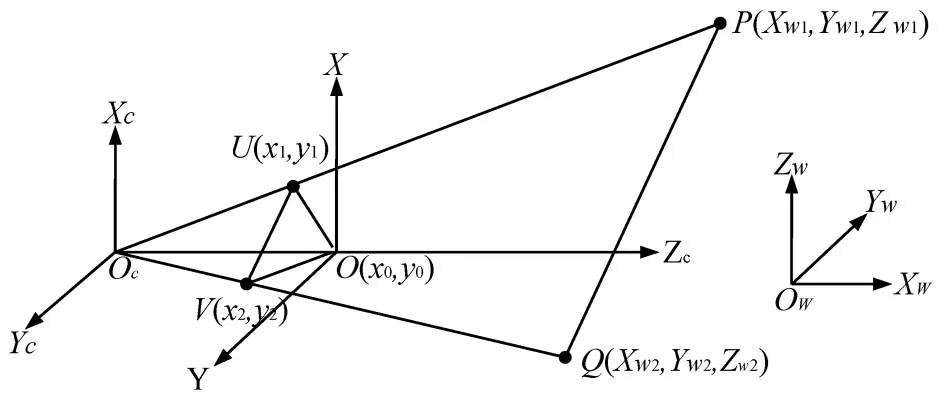
圖3 相機(jī)成像物像關(guān)系圖
用無(wú)人機(jī)位置、靶船位置和航向等數(shù)據(jù)計(jì)算兩個(gè)基準(zhǔn)點(diǎn)相對(duì)無(wú)人機(jī)的夾角α,則根據(jù)共線關(guān)系可知:

余弦定理可得:

式中,
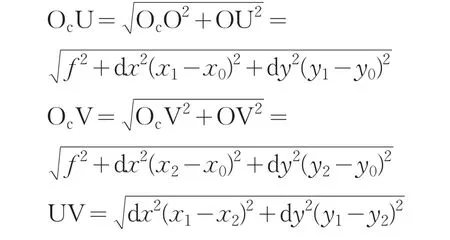
整理后得到:
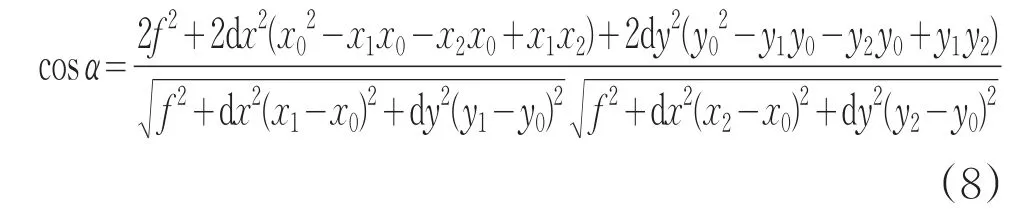
設(shè)(x0,y0)為相機(jī)視場(chǎng)中心,代入各已知量(x0、y0、x1、y1、x2、y2、dx、dy、α)后,則公式(7)就整理成為一個(gè)關(guān)于f2的一元二次方程。解方程,去掉一個(gè)不合理值(如果暫時(shí)不能確定,就在下一步多畫幅驗(yàn)算時(shí)選擇),然后開平方得到相機(jī)焦距f。
(2)多畫幅驗(yàn)算
在無(wú)人機(jī)飛行靶船攝錄過(guò)程中,會(huì)得到多幅靶船圖像,重得上述焦距計(jì)算步驟,就可以計(jì)算出一組焦距f,用f的均方差驗(yàn)證標(biāo)校數(shù)據(jù)的準(zhǔn)確性,如果均方差較大,說(shuō)明(1)中假定視場(chǎng)中心為光軸中心不合適,用x0+Δx代替(x0,y0)中x0位置,重新計(jì)算f均方差,調(diào)整Δx大小,找出f均方值最小位置,確定x0,同樣方法確定y0。用新的(x0,y0)重新計(jì)算焦距f。
3.2 水柱偏差計(jì)算
完成相機(jī)標(biāo)定得到內(nèi)參數(shù)矩陣,解空間幾何就可以計(jì)算出水柱偏差,具體計(jì)算步驟如下:
首先從圖像中識(shí)別出靶船中心A和水柱中心B,A、B兩點(diǎn)的像素坐標(biāo)(x1,y1)、(x2,y2),利用公式(6)分別計(jì)算出∠AOA′,∠BOB′,∠A′OB′三個(gè)角的角度值,A′像素坐標(biāo)為(x1,y0),B′像素坐標(biāo)為(x2,y0),O為相機(jī)焦點(diǎn)。
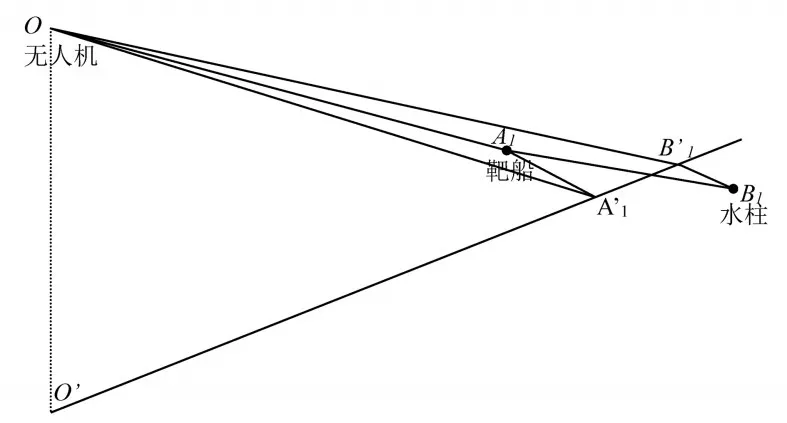
圖4 相機(jī)靶船水柱位置圖
靶船中心位置、水柱位置、相機(jī)焦點(diǎn)位置圖如圖4所示。相機(jī)焦點(diǎn)為O,靶船中心為A1,水柱位置為B1,靶船中心和水柱位置在視軸中心水平投影分別為A′1、B′1。
由相機(jī)成像共線關(guān)系得出:
利用靶船和無(wú)人機(jī)自帶衛(wèi)星定位系統(tǒng)實(shí)時(shí)位置信息計(jì)算出OA1和∠OA1O′,解空間三角形可分別計(jì)算出 A1A′1、A′1B′1、B′1B1的長(zhǎng)度,得到水柱在相機(jī)坐標(biāo)系下相對(duì)靶船的矢量偏差,最后進(jìn)行坐標(biāo)轉(zhuǎn)換得到水柱在靶船坐標(biāo)系下的偏差。
3.3 測(cè)量精度仿真分析
新標(biāo)校測(cè)量方法將無(wú)人機(jī)攝錄飛行與標(biāo)校飛行分開,靶船在視場(chǎng)中的大小不受限制,仿真計(jì)算時(shí)設(shè)定靶船占視場(chǎng)的二分之一。假設(shè)無(wú)人機(jī)與靶船定位精度均為5m,靶船航向精度為0.1°。保持2.2中理想的投影矩陣的內(nèi)參數(shù)不變,把飛機(jī)高度和距離靶船水平距離均減小到原來(lái)的三分之一,建立標(biāo)校投影矩陣,給基準(zhǔn)點(diǎn)位置和像素坐標(biāo)加上隨機(jī)誤差,用有誤差的標(biāo)校圖像對(duì)相機(jī)內(nèi)參數(shù)進(jìn)行標(biāo)校。攝錄測(cè)量投影矩陣與2.2相同,將靶船放在視場(chǎng)中心位置,選定水柱位置作為理論值,計(jì)算水柱像素坐標(biāo),增加隨機(jī)誤差后。用帶誤差的像素坐標(biāo)計(jì)算出目標(biāo)位置,與理論值進(jìn)行比較得到測(cè)量誤差。仿真計(jì)算結(jié)果表明,新方法測(cè)量的水柱偏差的誤差在全視場(chǎng)范圍內(nèi)均小于4.7m,而且誤差大小沒有靶船航向相關(guān)性。
3.4 靶船晃動(dòng)對(duì)測(cè)量精度的影響
2.2與3.3精度分析中都沒有考慮靶船晃動(dòng)因素,靶船晃動(dòng)分橫搖縱搖兩個(gè)分量,一般橫搖角度大,縱搖角度小。2.2中測(cè)量方案中,橫搖縱搖對(duì)結(jié)果都有影響,當(dāng)縱搖±3°時(shí),經(jīng)計(jì)算靶船晃動(dòng)會(huì)造成最大10個(gè)像素的誤差。新標(biāo)校測(cè)量方法中,因?yàn)閮蓚€(gè)基準(zhǔn)點(diǎn)分別在靶船艏艉處,只有縱搖對(duì)標(biāo)校有影響,而且標(biāo)校飛行時(shí)飛機(jī)位置沒有限制,因此可以通過(guò)選擇標(biāo)校區(qū)段來(lái)減小晃動(dòng)帶來(lái)的誤差。設(shè)飛機(jī)高1000m,以兩基準(zhǔn)點(diǎn)水平時(shí)成像間隔200像素,計(jì)算縱搖±3°的晃動(dòng)給像素間隔帶來(lái)的最大誤差,計(jì)算結(jié)果如圖5所示。由圖中可以看出,當(dāng)飛機(jī)在靶船正上方時(shí),晃動(dòng)帶來(lái)的影響最小,飛機(jī)偏離靶船150m以內(nèi)時(shí),最大誤差小于2像素,滿足2.2與3.3精度分析條件。試驗(yàn)測(cè)量時(shí),如遇靶船晃動(dòng)較大情況,可以選取飛機(jī)在靶船上空的圖像進(jìn)行標(biāo)校,就可避免晃動(dòng)給測(cè)量帶來(lái)誤差。
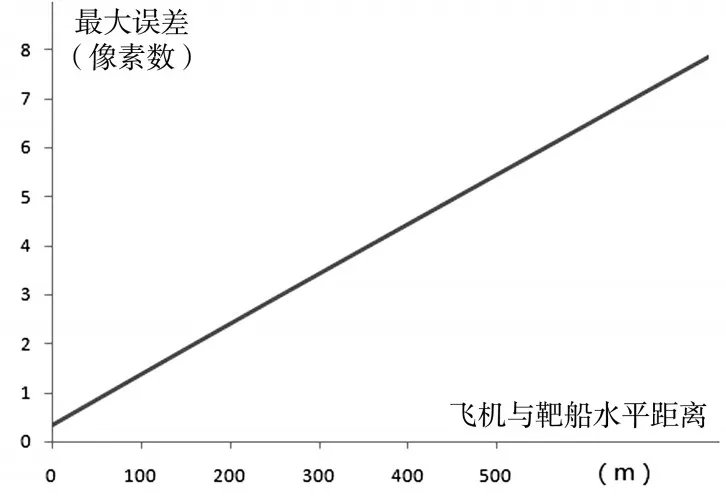
圖5 飛機(jī)與靶船水平距離與晃動(dòng)最大誤差
4 結(jié)論
傳統(tǒng)相機(jī)標(biāo)校測(cè)量方法中,為保證測(cè)量的高精度,標(biāo)校時(shí)基準(zhǔn)點(diǎn)應(yīng)均勻分布在視場(chǎng)中,這給測(cè)量應(yīng)用帶來(lái)一定局限性。基準(zhǔn)點(diǎn)越集中,測(cè)量誤差越大,某些特定應(yīng)用時(shí)不能滿足使用要求。新的標(biāo)校測(cè)量方法將標(biāo)校過(guò)程與目標(biāo)測(cè)量過(guò)程分開,利用地面部分標(biāo)校結(jié)果,在空中用兩個(gè)基準(zhǔn)點(diǎn)就完成相機(jī)內(nèi)參數(shù)標(biāo)定,再用相機(jī)內(nèi)參數(shù)和像點(diǎn)坐標(biāo)確定目標(biāo)的空間幾何關(guān)系,解算出目標(biāo)位置。在無(wú)人機(jī)攝錄水柱偏差測(cè)量上的成功應(yīng)用表明,該方法克服了基準(zhǔn)點(diǎn)受限的困難,保證了測(cè)量精度,對(duì)其它變焦電視系統(tǒng)的測(cè)量應(yīng)用有一定借鑒作用。
參考文獻(xiàn)
[1] 黃殿君,景文博,王曉曼,等.一種基于模板匹配的遠(yuǎn)場(chǎng)畸變校正方法[J].長(zhǎng)春理工大學(xué)學(xué)報(bào):自然科學(xué)版,2014,37(6):127-133.
[2] Zhang ZY.A flexible new technique for camera calibration[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2000,22 (11) :1330-1334.
[3] 韓九強(qiáng),胡懷中,張心曼,等.機(jī)器視覺技術(shù)及應(yīng)用[M].北京:高等教育出版社,2009.
[4] 張廣軍.機(jī)器視覺[M].北京:科學(xué)出版社,2005.
[5] 郭方,王克逸,閆佩正,等.用于大視場(chǎng)目標(biāo)定位的復(fù)眼系統(tǒng)標(biāo)定[J].光學(xué)精密工程,2012,20(5):913-920.
[6] 牛海濤,趙勛杰.采用棋盤格模板的攝像機(jī)標(biāo)定新方法[J].紅外與激光工程,2011,40(1):133-137.
[7] 江晟,曲昭偉,胡宏宇,等.基于像素-角度映射的攝像機(jī)標(biāo)定算法[J].哈爾濱工業(yè)大學(xué)學(xué)報(bào),2012,44(8):130-135.
[8] 凡芳,王振偉,劉雙印,等.面向視覺測(cè)量的相機(jī)標(biāo)定誤差分析[J].實(shí)驗(yàn)科學(xué)與技術(shù),2016,14(6):14-16.
[9] 尹洪濤,劉成,李一兵,等.相機(jī)標(biāo)定誤差因素分析[J].信息通信,2012(1):28-30.
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級(jí)版)(2015年4期)2015-04-29 00:00:00