力矩電機的高精度伺服控制
2018-05-28 07:01:05北京衛星制造廠有限公司劉锏澤張仰成齊鑫哲
電子世界 2018年10期
北京衛星制造廠有限公司 劉锏澤 張仰成 盛 君 齊鑫哲
首先是測試伺服系統的性能指標;其次介紹功率電路的設計以及控制單元的構成,它們要以大扭矩的力矩電機中的全數字伺服驅動器作為基礎,分析才能符合合理性的要求。
1.測試伺服系統性能指標
1.1 概述力矩電機
高性能力矩電機運用在低速高精度的大扭矩運動的數控機床之中,傳統的歩進、直流、利用模擬控制的交流伺服技術已經不適應現在通訊電子技術以及計算機控制技術的應用,取而代之的是全數字控制的永磁同步的電機伺服系統,這是當代伺服控制的主流方法。力矩電機中的伺服控制當中,命令信號不斷變化會自動準確地影響速度、位置以及輸出轉矩。伺服的控制系統作為自動控制系統會對輸入的指令的信號進行跟蹤,能夠獲取速度以及動力輸出的精確數值。具體應用表現在工件的加工過程中伺服控制的精度,刀具給進位置的信息會被位置傳感器傳送給工控機,和設定的位置目標比較之后,工控機有停止切割以及繼續給進的命令進行選擇輸出。
1.2 伺服系統性能指標的測試

圖1 伺服系統
對伺服電機的測試系統結構如圖1,具體參數可從圖中獲知;但是本文主要對測試伺服系統指標進行闡述,分別有幾點如下:
首先,伺服系統的穩定性;伺服系統消除干擾之后,系統能夠恢復到原先的穩定狀態的性能。具體指標表現在穩定狀態的系統中時間足夠短則,系統中的穩定性就可以判斷為良好;反之,越來越強烈的等幅振蕩狀態在系統中出現就是不穩定狀態。
其次,相應的特性;輸入的指令變化決定著輸出量的變化速度,同時也決定了伺服系統中的工作效率。有許多原因造成變化速度的不同,比如計算機的運行速度以及質量、阻尼運動等。
然后,工作的頻率,輸入信號符合伺服系統的頻率范圍之內;系統就會設定固定的工作頻率信號,如果非此信號,系統就不能夠在技術要求范圍內正常的工作。
最后,系統的精度;高精度的伺服系統輸入信號的重復出現量需要對精確程度有要求,否則會出現誤差的情況,誤差表現有靜態、穩態、動態等。振蕩衰減的形式是伺服系統的輸入變化表達;動態誤差是振蕩過程以及幅度產生動態的系統誤差。穩態誤差,衰減到一定的程度以后會出現;靜態誤差由裝配中的精度以及設備中零件的精度決定的。
2.高精度力矩電機的控制特性
高速的加工設備以及航空制造業中對直接驅動技術的采用越來越廣泛,由于直接驅動技術擁有較高可靠性、剛性良好的傳動系統、傳動過程中沒有間隙等較多優點,力矩電機、電主機以及直線電機皆采用此種技術。高精度伺服控制中,力矩電機可以匹配具備更高要求的剛性、抗干擾能力、魯棒性的系統,想要具備高精度對力矩電機進行控制,就需要對力矩電機特點進行了解,利用復雜且先進的控制算法對力矩電機進行有效控制。
2.1 力矩電機伺服控制系統的組成
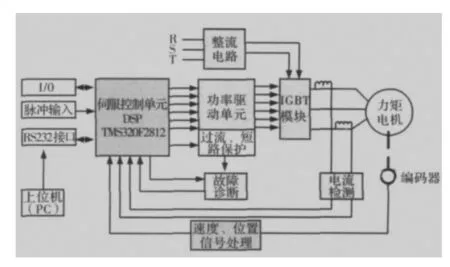
圖2
圖2就是力矩的電機伺服控制系統的構成框圖,從圖中可以看到系統主要有幾大單元來組成:功率變換的電路單元、伺服控制單元、力矩電機、通訊的單元接口、反饋器件。
其中,伺服控制單元由速度、位置、電流、轉矩控制器等組成。硬件上的主控芯片利用型號為TMS320F2812 DSP;其有不少的優勢,比如硬件的簡單性、較高的精度、較高的可靠性;設計力矩電機的數字交流伺服系統的時候,利用到主控芯片中幾大優點更能夠優化系統。RS232通訊接口作為通訊的接口單元,上位機指令著特定的通訊協議,然后根據不同的要求進行參數的傳送,就能夠讓上位機監控或者調試伺服驅動器。
力矩電機的伺服系統中最重要的構成部分是傳感器,交流電機的伺服系統優越性能想要實現,關鍵就是傳感器是否能夠準確地對系統運行的狀態進行反映。電流的信號監測至少需要采樣兩相的電流,兩相電流采樣考慮到負載的對稱性,每一相電流是根據兩相電流的求和反獲得的,采樣電流根據霍爾傳感器的原則,利用模擬電路將采樣電流處理成3V電壓范圍之內。伺服控制系統工作過程需要設置對電路保護的措施;欠壓、過壓、電機過熱、編碼器故障、超速、位置超差等不同參數的保護措施要考慮到位;直接對開關脈沖進行封鎖需要故障的信號經過邏輯電路才可以,同時從DSP中的I/0口輸入,利用軟件進行監測以實現系統的保護。
2.2 力矩電機的優勢以及控制特性
本文分析的力矩電機是無框架的水冷永磁同步電動機,由二十二對磁極以及空心軸轉子構成;而轉子、定子、軸承、位置編碼器、冷卻的外殼組成了完整的電機。該電機具備不少的優點:
第一,精度具備零間隙、高定位;利用力矩電機的設備想要提高其精度,就可以通過該點來實現;直接驅動沒有中間的機械傳動環節阻礙,這樣就能夠快速實現傳動,效率高。
第二,電機伺服的性能非常好。靜態負載剛性以及高動態是直接驅動所具備的特性,位置環和速度環能夠獲得較高的閉環寬度。伺服系統中對負載的抵抗擾動能力和較快的響應速度獲得皆受益于高寬帶。
第三,機械設計的簡化,免除了驅動維護;利用力矩電機之后,電機上沒有維護件或者損耗件,這是工程設備中良好的狀態體現。
第四,直接驅動;利用直接驅動的方式能夠將傳統電機的減速機構除去,如此就可以具備較高的可靠性能以及較高動態性能,能夠為電機中的負載提供比較大的轉矩。
控制的特性,力矩電機驅動系統中,負載受到電動機直接驅動緣故,電機會受到來自外界的不同的擾動,參數變化以及轉矩的擾動會影響控制的性能;同時,較大轉矩有波動時通常會受到大功率力矩電機影響,會導致伺服控制系統中控制性能嚴重的下降。不過不可排除的是電機直接被驅動時的意外情況,轉矩波動是電機設計中不可消除的情況。所以,伺服電機控制方法之中,需要對轉矩波動的抑制、電機非線性的抵消、系統魯棒性的提高等進行優化才可。
3.結語
從高精度的伺服控制電機為主題去分析,不僅能夠分析力矩電機的概念、測試伺服系統的指標;而且還能夠對高精度力矩電機的控制特性進行闡述。這個過程必須要明確主控芯片,利用空間矢量控制獲取高精度、高性能特性。伺服控制系統在商業價值上面會隨著其性能指標的提高而有所突出,生產中的工件質量會被伺服系統的性能所決定,這就是本文分析的意義。
[1]龍滿林,付永領,李光華,陳雙橋.自抗擾算法在直流力矩電機伺服系統中的應用[J].中國機械工程,2012,23(09):1047-1050.
[2]高月波,王勉華,張國平,吳衛安.高性能高精度力矩電機伺服控制系統設計[J].微電機,2012,45(02):52-55.
[3]袁文,劉廷章,張國平,趙天錫.力矩電機伺服系統性能測試技術研究[J].微電機,2010,43(12):87-89+104.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25