基于改進差分進化算法的磁流變阻尼器建模研究
2018-05-30 01:48:00武漢理工大學自動化學院
電子世界 2018年9期
關鍵詞:模型
武漢理工大學自動化學院 劉 冰 傅 劍
0 引言
汽車行駛時,由于路面的高低不平,車身會受到沖擊發生振動。輕微的車身振動會影響車載人員的舒適性,但較大的振動不僅會損壞汽車零件,嚴重時還會影響車載人員的安全。在現代汽車結構中主要是通過車輛懸架系統來減緩振動,保證車輛的行駛的平順性和操縱的穩定性。
基于磁流變阻尼器的半主動懸架利用磁流變液受外加磁場作用其流變特性發生改變的特點,使得懸架能在較大范圍內,較低功耗下實現阻尼可調,從而滿足汽車變路面、變工況的需要。現有研究表明,該懸架對車輛的駕駛平順性和操縱穩定性有顯著改善,是下一代智能懸架的發展方向,具有巨大的研究價值和廣闊的應用前景[1]。
現階段磁流變半主動懸架的主要技術難點之一在于磁流變阻尼器的力學特性具有較為復雜的遲滯非線性,常規的工程方法難以建立符合實際應用需求的數學模型,國內外相關學者對此問題進行了大量研究。本課題擬基于對磁流變阻尼器力學試驗數據的分析,構建出準確高效,便于控制阻尼器數學模型。
1 磁流變阻尼器力學試驗分析
本文試驗對象為武漢理工大學自行設計的磁流變阻尼器,如圖1所示。力學試驗中,電機驅動阻尼器活塞桿相對于阻尼器缸筒做簡諧運動。設置激勵輸入頻率為1Hz,幅值為0.03m。分別測得磁流變阻尼器在不同勵磁線圈電流下的F-v和F-s的數據,對數據進行處理后繪制出相應關系曲線,如圖2所示。

圖1 磁流變阻尼器實物圖
對外特性曲線進行分析,可將磁流變阻尼器阻尼力的變化過程分為四個階段,具體如下:
在阻尼器活塞位移由正向最大位置運動至0階段,同時速度也由0增大到負向最大,在此階段阻尼器阻尼力先隨速度變化迅速負向增大后再轉為近似線性增大,原理是被低速剪切時,磁流變液存在屈服應力,而當剪切速率提高,超過其剪切屈服強度時磁流變液則表現為有固定屈服強度的牛頓流體特征,但由于剪切稀化現象存在,阻尼力并非呈現嚴格的線性增大。
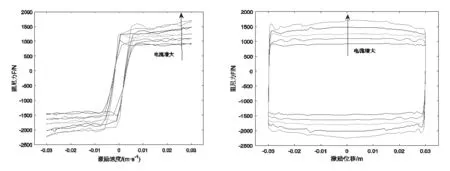
圖2 磁流變阻尼器隨電流變化的外特性曲線圖
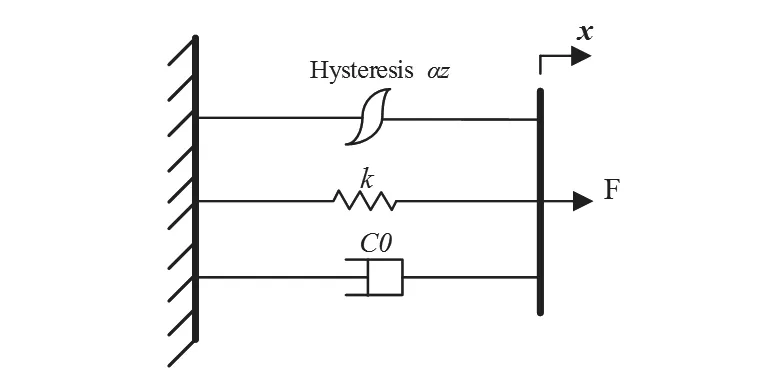
圖3 Bouc-wen模型示意圖
在阻尼器活塞位移由0運動至負向最大位置以及位移由負向最大位置至0的過程與上述分析類似。
考慮勵磁線圈電流與磁流變阻尼器輸出阻尼力的關系。當線圈電流增大時,阻尼器內的磁場強度隨之增強,磁流變液的剪切屈服強度也會提高,在未屈服階段磁流變阻尼器輸出的阻尼力也越大,造成遲滯回環也越大。而在因電流增大磁場強度快達到上限時,磁流變液屈服強度增大減緩,阻尼器輸出阻尼力增加幅度不明顯,接近飽和。
2 磁流變阻尼器參數模型
Bouc-wen模型是1976年Wen[2]用于擬合力學特性曲線使其光滑過渡首次提出的,該模型特別適用于具有非線性滯回特性的磁流變阻尼器。其結構如圖3所示。
Bouc-wen模型描述的磁流變阻尼器力學模型公式如下:

上式中,為磁流變液屈服后的粘性系數;為激勵速度;為彈簧元件初始位移;為滯變力相關參數;為滯變位移;為曲線圓滑系數;均為遲滯環相關的系數,難以用具體物理量描述。
由于Bouc-wen模型公式相對簡單,涉及的參數也相對較少,特別是描述阻尼器的力-位移和速度-位移關系曲線特別精確,因此本文選擇Bouc-wen模型作為前文中的磁流變阻尼器的對象模型,其模型參數可用參數識別的式確定。
取剪跨比λ為4,軸壓比ηk為0.1,配筋率ρl為0.96%在不同縱筋強度的三種矩形空心墩,縱筋強度分別為464 MPa、507 MPa、542 MPa,進行Pushover分析,其對應的能力曲線如圖12所示,由圖12可知,縱筋強度的提高對空心墩的承載能力有所提高,但空心墩位移延性隨著縱筋強度的提高而減小。
3 磁流變阻尼器建模
參數識別是一種利用實驗數據確定理論模型參數的方法。本文對磁流變阻尼器建模主要思路是,遵循一定約束條件,通過智能算法對阻尼器試驗數據進行處理,計算出最為吻合試驗數據的模型中的參數。
3.1 差分進化算法及其改進
差分進化算法(Differential Evolution),簡稱DE算法,是1996年由Storn和Price最初為解決Chebyshev多項式而提出的[3]。和其他進化算法相比差分進化算法在求解高維、多極值、非線性復雜函數時魯棒性、計算速度和全局搜索能力上有明顯的優勢。
基本的DE算法雖然求解能力很強,但是仍有值得完善的地方:隨著迭代次數的增加,種群的多樣性變小,過早收斂于局部最優點。為平衡全局搜索和局部搜索能力,可以通過對控制參數的調整來對DE算法進行改進。為此本文在DE算法的一些參數上引入自適應調整策略,以使DE算法更好的適用于Bouc-wen模型的參數識別。
(1)變異操作的改進
變異過程中的縮放因子用于控制差分向量對變異個體影響程度,在標準DE算法中,合適的F值不易由公式求得準確值,一般根據經驗選取一個0到2之間的固定實數。自適應變異算子λ的引入是對DE算法進行改進的常用方法,它的作用是在算法執行過程中自適應調整種群變異擾動[4]。F可以用如下公式表述:

式中,F0是縮放常數;G是最大迭代次數;g是當前迭代代數。由上式可以看出,在迭代開始時,縮放因子F = 2F0,使種群在初期有較大個體差異性,避免早熟,算法具有較強的全局搜索能力;隨著迭代次數增加,F逐漸減小,到迭代后期F值接近F0,這種策略使優良個體信息得以保留,提高了求解精度。
(2)交叉操作的改進
DE算法中,交叉概率CR值決定了變異中間個體與原個體之間信息交換的比例,對算法的收斂速度和種群多樣性也有關鍵影響。CR取值對算法執行的影響不易直接觀察得到,一般認為種群多樣性較好時,較小的CR值使新個體中變異信息較少,增強了全局搜索能力,提高了求取最優解的概率;反之,種群多樣性較差時,較大的CR值提高了新個體中變異信息的比例,增大了種群多樣性,加快了收斂速度,對CR值引入自適應調整的策略。CR值可表示如下:

式中,CRmax和CRmin分別表示交叉概率CR的上界和下界。在初始階段,CR值較小,此時收斂速度較慢,能讓算法具有較強的全局搜索能力。隨著迭代次數增加,CR值也開始增加收斂速度也逐漸加快,到后期人為增加了物種多樣性,提高了算法的求解精度。
3.2 Bouc-wen參數識別
參數識別的實施策略是,將DE算法的每個個體作為模型需要識別參數的一組解,選取由模型計算出的阻尼力與試驗數據差值的平方和作為適應度函數,通過DE算法迭代更新,搜索出適應度最低的一組解。
在Bouc-wen模型中,n為與曲線圓滑度相關的系數,一般值為2。為彈簧元件初始位移,在本文中為0。則需要識別的參數共6個,分別是。
對DE算法參數進行設置。取初始種群個數NP = 100;最大迭代次數G = 500;變異參數F0=0.3;交叉概率CRmax= 0.85,CRmin。由于參數范圍難以直接確定,首次識別時取較大取值范圍,因此可設:

式中,m為采樣點個數,F為由Bouc-wen模型計算得出的阻尼力,Ft為采樣點實際阻尼力。
利用磁流變阻尼器力學特性試驗數據,對Bouc-wen模型進行改進DE算法的參數識別。其編程設計流程如圖4所示。
定義參數識別的適應度函數:
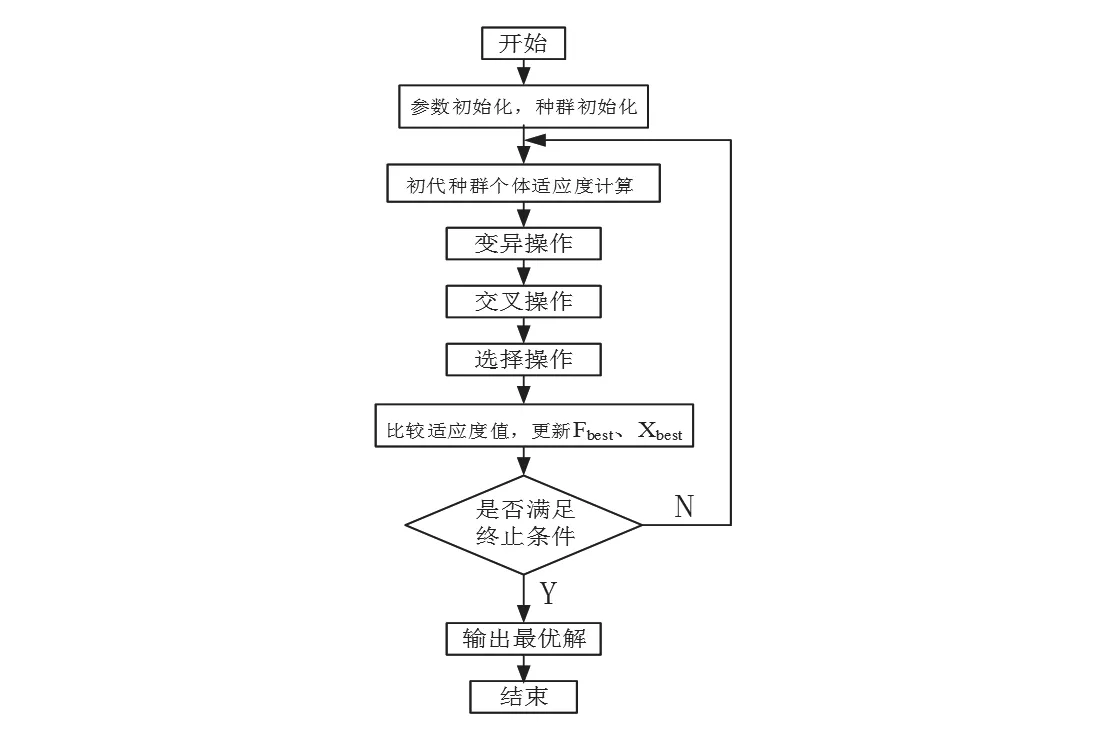
圖4 改進DE算法參數辨識流程圖
經過多次識別后得到的在不同電流條件下對應的各參數值,如表1所示。
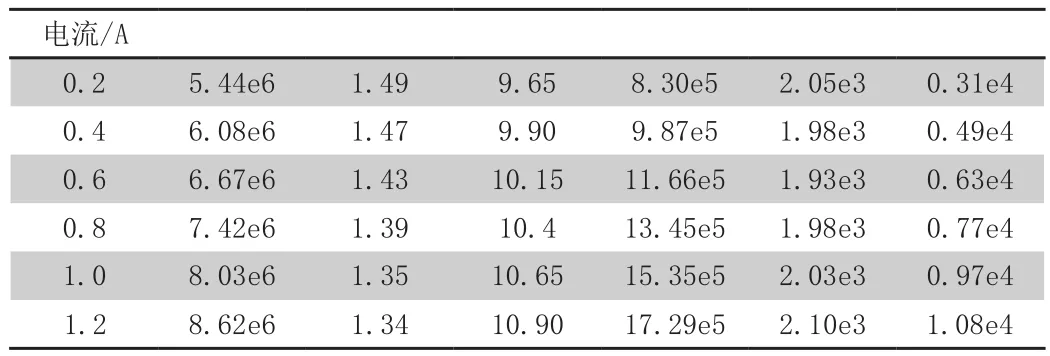
表1 DE算法識別得到的各參數值
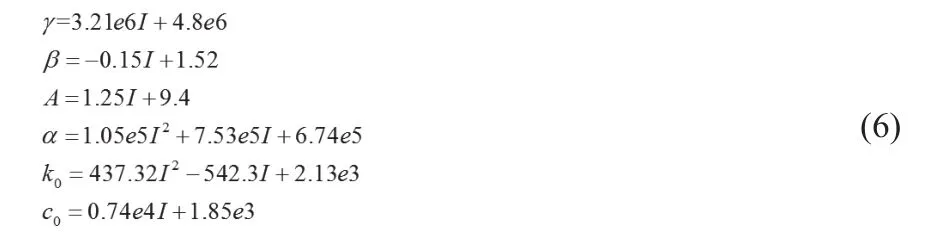
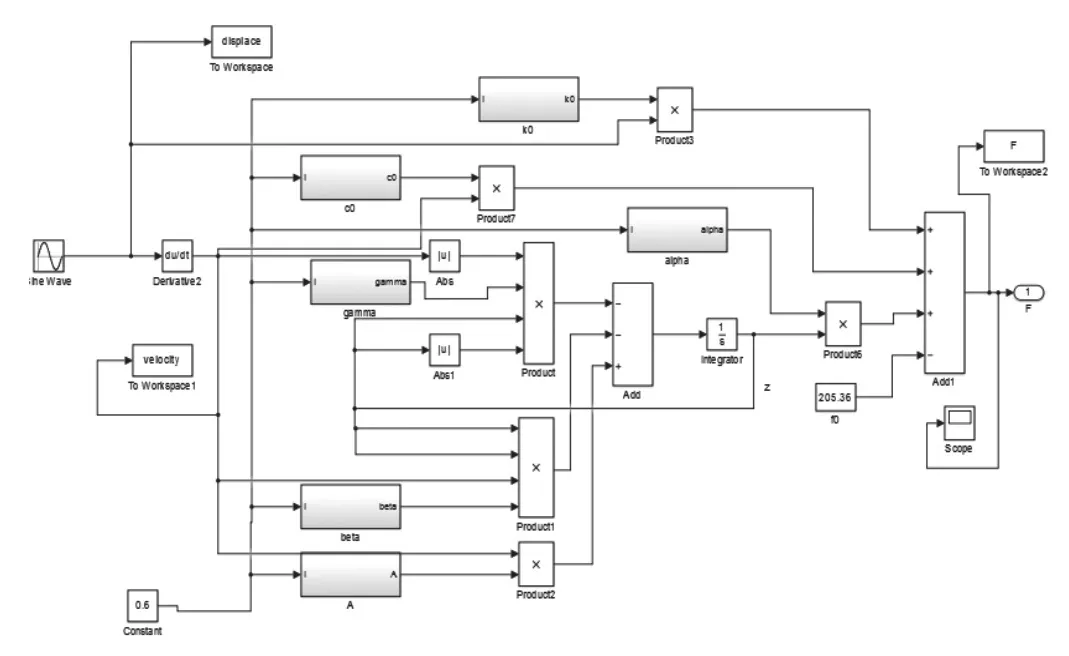
圖5 磁流變阻尼器Simulink模型
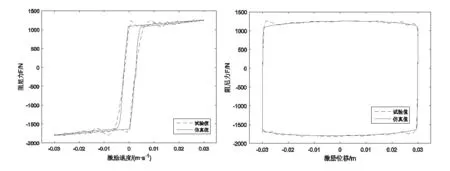
圖6 仿真模型輸出曲線與試驗數據曲線對比
5 仿真模型及結果分析
利用所識別出的Bouc-wen模型參數,在Matlab/Simulink平臺上對磁流變阻尼器進行建模,并驗證仿真模型的準確性。所得模型如圖5所示。
在上述模型中給定輸入電流0.6A,設定位移激勵為幅值為0.04m,頻率為1Hz的正弦波,與相同條件下得到的阻尼器試驗數據進行對比,結果如圖6所示。
對比仿真模型輸出結果與試驗數據,可以看出,二者吻合程度很高,證明了仿真模型具有較高的精確度,達到了預期的效果。
6 結論
本文針對磁流變阻尼器建模問題,采用改進的差分進化算法,對磁流變阻尼器進行以Bouc-wen模型為對象模型的參數識別,并建立了磁流變阻尼器的仿真模型。對比仿真模型結果與實際試驗數據,證明了該仿真模型精確度較高,易于控制,滿足預期要求,具有較大的研究價值。
[1]王其東,梅雪晴.汽車半主動懸架的研究現狀和發展趨勢[J].合肥工業大學學報(自然科學版),2013(11):1289-1294.
[2]Wen Y K.Method for Random Vibration of Hysteretic System[J].Journal of the Engineering Mechanics Division,1976,102(2):249-263.
[3]Storn R,Price K.Differential evolution-a simple and efficient heuristic for global optimization over continuous spaces[J].Journal of global optimization,1997,11(4):341-359.
[4]顏學峰,余娟,錢鋒,等.基于改進差分進化算法的超臨界水氧化動力學參數估計[J].華東理工大學學報(自然科學版),2006,32(1):94-97.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
