
基于單片機的智能盲人避障靴子
2018-05-30 01:48:01大連海事大學信息科學技術學院劉天金
電子世界 2018年9期
大連海事大學信息科學技術學院 劉天金 楊 雪
0 引言
隨著科學技術的飛速發展,電子產品越來越普遍,一些智能盲人出行輔助設備的出現大大改變了盲人對傳統的盲杖的依賴,但是有些智能電子設備價格昂貴,且類似于智能盲杖之類的設備帶來了一定的勞動強度,給盲人的出行帶來了不便。
目前,單片機的控制技術已經非常成熟。將單片機與其他諸如超聲波測距、液晶顯示器、人體感應器、GPS模塊等結合起來實現智能盲人避障鞋子的設計,具有深刻的現實意義和研究意義。本文主要圍繞智能盲人避障靴子主要功能的設計與實現展開研究,以設計一種價格低廉、適用范圍廣、操作方便、并能實現簡單人機交互的智能盲人避障靴子。
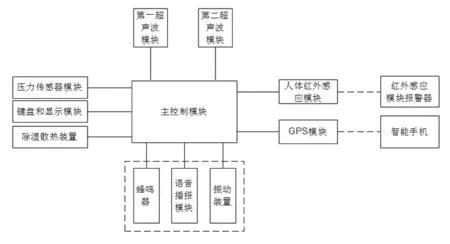
圖1 系統功能框圖
1 系統概述
該智能盲人避障靴子總體由7個模塊構成,功能框圖如圖1所示。其中,主控制模塊以單片機為核心構成,對系統進行整體控制;超聲波模塊進行障礙物距離探測,由固定高度不同的兩個超聲波模塊結合可以實現對障礙物高度的預估;人體紅外感應模塊可以對行人進行探測,紅外感應報警器與之無線連接實現報警提示;報警提示模塊由蜂鳴器、語音播報和振動裝置三個部分構成;按鍵與液晶顯示可以實現報警距離的設置和語音錄入操作;壓力傳感器模塊控制超聲波電路的通斷進行防誤判處理;GPS模塊對盲人進行定位,并通過GSM模塊與智能手機通信;除濕散熱裝置對主控制模塊進行必要時的除濕散熱。
2 硬件設計
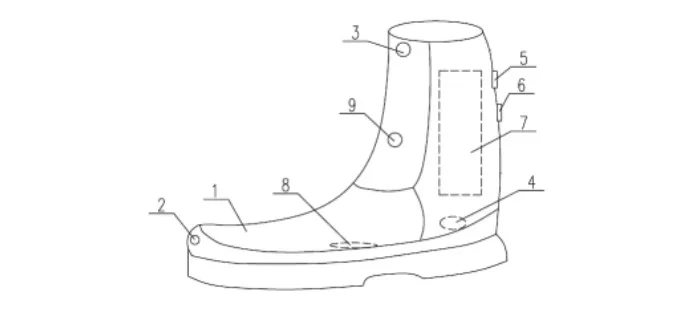
圖2 實物結構簡圖
該智能盲人避障靴子的實物結構簡圖如圖2所示,其中各模塊的名稱為:1.鞋體;2.第一超聲波模塊;3.第二超聲波模塊;4.壓力傳感器;5.蜂鳴器模塊;6.語音播報模塊;7.主控制模塊;8.振動裝置;9.人體紅外感應模塊。
下面結合系統具體功能介紹該項目的硬件設計。
2.1 超聲波避障
此功能由HC-SR04超聲波測距模塊來實現,此模塊安置于靴體前端并按照高度不同分為第一超聲波模塊與第二超聲波模塊。模塊實物圖如圖3所示。VCC供5V電源,TRIG為觸發控制信號輸入引腳,ECHO為回響信號輸出引腳,GND為地線。用單片機連續向TRIG引腳輸出10μs以上的脈沖觸發信號,該模塊內部將循環發出8個40KHz脈沖并由接收管檢測回波,一旦檢測到有回波信號則ECHO引腳向單片機輸出高電平回響信號,回響信號的持續時間即超聲波從發出到碰到障礙物后的返回時間,工作時序圖如圖4所示,由公式1計算出障礙物的距離,通過測試,此模塊的測距精度可達3mm。
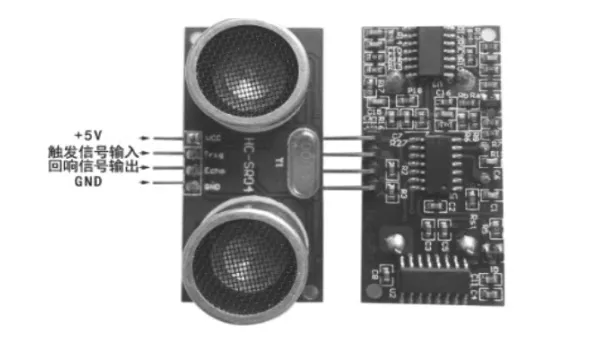
圖3 超聲波模塊實物圖
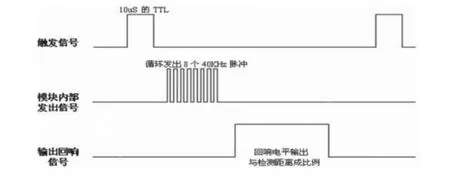
圖4 超聲波模塊工作時序圖

2.2 防誤判設計
由于盲人在行走抬腳時腳尖會下傾,此時超聲波模塊也會下傾朝向地面,會引起的超聲波模塊的誤檢測。為此,項目組在靴子腳后跟處安置壓力傳感器,位置如圖二中4所示,這樣只有在腳放平(即腳完全落地)時,壓力傳感器才會感受到足夠的壓力,電阻值減小,此時單片機驅動超聲波電路工作;而當腳抬起時,由于壓力傳感器幾乎感覺不到壓力,電阻增大,使超聲波電路斷開,超聲波模塊不工作,因而也就不會引起誤判現象。在防誤判功能的實現中,該壓力傳感器選擇薄片式的FSR402,實物如圖5所示,其具有纖薄、輕柔、小巧等特點,適合足底壓力的檢測,其阻值隨壓力變化關系如圖6所示。

圖5 FSR402實物圖

圖6 FSR402阻值隨壓力變化曲線
2.3 障礙物高度預估與距離提醒
該項目在障礙物高度預估功能的實現中,是通過兩個超聲波模塊相配合并輔助以不同的報警提示來完成的。如圖2所示,第一超聲波模塊距離靴底的高度約為50mm,第二超聲波模塊距離靴底的高度約為200mm。具體實現為:當障礙物高度在50~200mm范圍內時,由第一超聲波模塊進行探測并報警,若障礙物距離在1m~3m范圍內,這段距離對盲人安全影響較小,由語音播報提供具體距離信息,若障礙物距離小于1m,這段距離對盲人安全影響較大,由蜂鳴器提供報警提示,且距離越近報警頻率越高;當障礙物高度超過200mm時,第二超聲波模塊也參與測距,并由腳心處的振動裝置發出振動。
語音播報距離精確,但不能做到實時播報;而蜂鳴器只能定性提供距離信息,但是距離一旦改變,其音調就會立即發生變化,因此可以做到實時報警,能夠及時準確的向盲人提供相關報警信息,保障了盲人的安全。通過不同的報警提示來預估障礙物的高度,可以使盲人通過不同的方式做出相應的處理,比如,如果障礙物高度為50mm~200mm,那么盲人可以稍微邁高即可越過障礙物;如果障礙物高度大于200mm,那么盲人可能要邁更高的步子,或者用手來試探前方是否是墻面或者柵欄一類的較高障礙物,通過這樣的方式,來使得盲人的出行更加方便和安全。
2.4 人體紅外感應
由于超聲波模塊只適用于探測靜止物體,而對于行人無法進行實時快速的探測,因此我們利用人體紅外感應模塊來輔助超聲波模塊進行探測。該人體紅外感應模塊采用HC-SR501人體紅外感應器,實物如圖7所示。當該模塊探測到前方有行人時,通過藍牙發出信號;紅外感應模塊報警器通過藍牙接收到該信號,使報警器發出警報。電路圖如圖8所示。
經過測試,該紅外感應模塊可以檢測盲人前方7m以內、120°的錐體范圍內的行人,當在該范圍內有行人時,報警器即可產生報警。相比于超聲波模塊,人體紅外感應模塊探測范圍大,效率高,二者相互彌補,使探測系統更加完善。
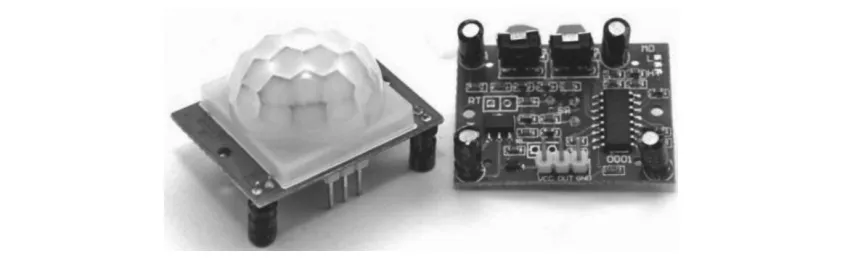
圖7 人體紅外感應模塊實物正面與背面
2.5 GPS定位
該智能盲人避障靴子采用體積小、功耗低的GY-NEO-6M GPS模塊實現定位,其與主控制模塊安置在一起。單片機通過串行接口控制GPS模塊對盲人進行實時定位,并讀取定位信息,再把位置信息傳遞給GSM模塊,GSM模塊利用GSM網絡將接收的定位數據傳遞到盲人家人的手機上,從而實現對盲人的定位。GPS模塊工作示意圖如8所示。GPS模塊通過GSM模塊與手機通信,方便盲人的家屬實時的了解和監視盲人的位置,保證了盲人的安全,防止其走失。
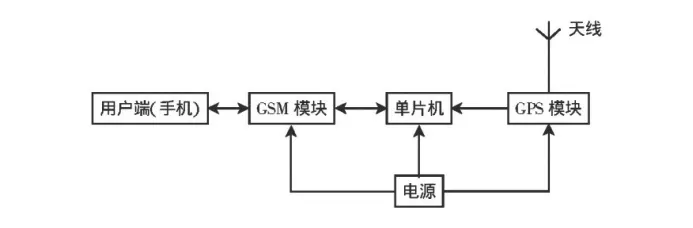
圖8 GPS模塊工作示意圖
2.6 報警提示模塊
報警提示模塊由蜂鳴器、語音播報和振動裝置三個部分構成。蜂鳴器采用TMB12A05有源電磁式蜂鳴器,其具有功耗低、易于實現的特點;語音播報模塊采用ISD4004語音芯片,該芯片具有可重復擦寫的功能,即使用者可以自己錄入語音提示聲音;振動裝置用偏心電動機來實現,其與手機振動器原理相同。這些提示模塊分別在上文所述超聲波模塊、人體紅外感應模塊的條件下起作用。
2.7 除濕散熱裝置
在除濕散熱裝置中,包括溫度探測裝置、濕度探測裝置、加熱模塊以及風扇模塊。用于實時監測主控制模塊所處的工作環境,并將測得的信息發送給主控制模塊,當主控制模塊處于的環境不適合其工作時,主控制模塊控制除濕散熱裝置的加熱或風扇模塊進行工作,以提供主控制模塊合適的工作環境,防止硬件老化,延長其使用壽命。
3 軟件設計
該系統主程序工作流程圖如圖9所示。

圖9 主程序工作流程圖
4 結束語
在電子技術產品高速發展的形勢下,單片機的應用越來越普遍,利用單片機開發出來的產品已普遍應用于生活中。本文設計的智能盲人避障靴子也是基于單片機的開發而進行的,對功能進行了詳細的闡述。從盲人的角度出發,為盲人的出行提供了便利的同時,GPS功能的設計使得盲人的家人可以隨時隨地查看盲人的位置,進一步保障了盲人的安全。
[1]王冠生,鄭江華,瓦哈甫·哈力克,劉敬強,李榮立.基于Haptic技術的盲人輔助路徑誘導服務研制[J].電子技術應用,2012(5):145-148.
[2]于姣.基于單片機帶溫度補償的超聲波測距儀設計[J].電子科技,2015(8):56-58
[3]倪洋勛.淺談單片機在電子技術中的應用[J].計算機教學,2017(24):64-65.
[4]鮑捷,陳洪斌,歐人俠.基于單片機的新型導盲器的設計與應用研究[J].電子科技,2017(18):5-6.
[5]繩玉玲.淺談超聲波測距[J].電子測量,2017(7):46.
[6]陳林,陳金松,沈俊藝,陳亨利,湯姝茜.GPS定位智能導盲系統[J].數字技術與應用,2017(3):192-193.
[7]楊靜,王收軍.基于STC單片機GSM、GPS車載定位報警系統的設計[J].天津理工大學學報,2016(1):18-19.
[8]馬宏平,蔣勵,宋竹青,馬彥鵬,王風麗.多方向紅外測距新型智能導盲杖[J].光學儀器,2012(5):84-88.
[9]姚聚慧,鄭江華,王冠生,邵紫陽.盲人路徑誘導服務中的震動技術應用與研究[J].計算機應用與軟件,2012(11):20-23.
[10]張應和.基于Wi-Fi智能車遠程測距裝置結構設計與研究[J].機電一體化,2013(2):33-35.
[11]郭天祥.新概念51單片機C語言教程[M].電子工業出版社,2009.
[12]向長秋,胡湘娟,陽泳.基于AT89C51單片機的盲人避障裝置的設計[J].科技展望,2015(30):130.
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
表面工程與再制造(2019年6期)2019-08-24 06:40:04
電子制作(2019年9期)2019-05-30 09:42:02
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
電子制作(2018年12期)2018-08-01 00:48:04
