面向交通監(jiān)控的自適應(yīng)背景模型
2018-05-30 01:48:01長(zhǎng)春市規(guī)劃編制研究中心關(guān)可汗
電子世界 2018年9期
長(zhǎng)春市規(guī)劃編制研究中心 關(guān)可汗 趙 瑩
1 算法描述
本文以卡爾曼濾波[1]為更新算法,在大津算法基礎(chǔ)上提出虛擬像素點(diǎn)和雙閾值概念,自動(dòng)獲取每幀圖像最佳更新閾值進(jìn)行更新。同時(shí)提出強(qiáng)制更新思想,對(duì)達(dá)到最大等待時(shí)間的前景予以強(qiáng)制更新,置換已失效背景。
本文建立自適應(yīng)背景模型[2]的基本流程如圖1所示。

圖1 自適應(yīng)背景模型流程圖
卡爾曼濾波用來(lái)背景更新[3]有一定的局限性,此算法是一種一階穩(wěn)態(tài)系統(tǒng),但是前景運(yùn)動(dòng)目標(biāo)[4][5]的出現(xiàn)擾亂了這種穩(wěn)態(tài),卡爾曼濾波器把前景錯(cuò)誤的當(dāng)作背景來(lái)更新,導(dǎo)致更新失效。因此下文針對(duì)性的提出了選擇性背景更新和強(qiáng)制背景更新概念,很好的解決了上述出現(xiàn)的具體問(wèn)題。
1.1 選擇性背景更新
選擇性背景更新,是在有前景運(yùn)動(dòng)目標(biāo)的地方不更新,其他地方實(shí)時(shí)更新背景。其基本思想是:

其中,M代表有無(wú)前景目標(biāo)。
選擇性更新的閾值是在前景灰度上統(tǒng)計(jì)得到的,獲取前景灰度公式為:

其中,ΔF(x, y, t )為前景灰度值;C(x, y, t )為當(dāng)前幀灰度值;B(x, y, t )為背景灰度值。公式(2)對(duì)應(yīng)前景灰度分布圖如圖2所示。圖中,出現(xiàn)圖像灰度值小于0的像素點(diǎn),是因?yàn)楫?dāng)前幀車輛灰度值低于背景灰度值。

圖2 前景圖像灰度直方圖
為了確定在M=0時(shí)背景更新的閾值,通常做法是對(duì)前景圖像做絕對(duì)值處理,再手動(dòng)或自適應(yīng)算法獲得該閾值,如圖3所示。但是在前景正負(fù)灰度不對(duì)稱的情況下,取絕對(duì)值操作必然導(dǎo)致車輛信息的丟失,圖2中負(fù)數(shù)一側(cè)表示深色車輛灰度取絕對(duì)值后,在圖3中被“淹沒(méi)”在背景更新閾值T以下,代表該車輛無(wú)法被檢測(cè)到,因此得到的閾值不能真實(shí)的分割背景圖像。
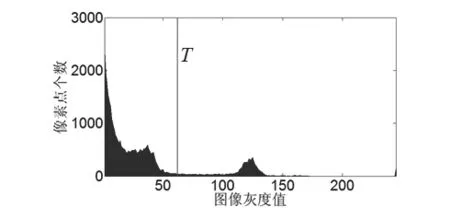
圖3 傳統(tǒng)算法獲取閾值圖
為此,本文對(duì)上述問(wèn)題進(jìn)行研究,提出了雙閾值判斷的概念,并針對(duì)一些特殊情況又提出了虛擬像素點(diǎn)的概念。
1.1.1 雙閾值判斷
雙閾值判斷建立在大津算法之上,大津算法就是在背景與前景目標(biāo)兩類中間找到一個(gè)最佳閾值T,該閾值使兩類目標(biāo)分錯(cuò)的概率最小,使類間方差最大。算法實(shí)現(xiàn)如下:
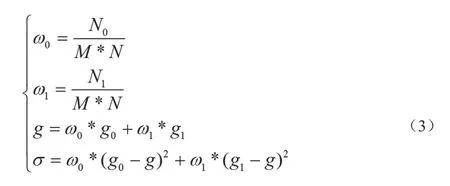
其中,ω0為前景點(diǎn)占圖像比例;g0為前景平均灰度;ω1為背景點(diǎn)占圖像比例;g1為背景平均灰度;N0為像素的灰度值小于閾值T的像素個(gè)數(shù);N1為像素的灰度值大于閾值T的像素個(gè)數(shù);圖像的大小為M * N。帶入 g 得最大圖像類間方差:

當(dāng)從最小灰度T = 0遍歷255個(gè)灰度,使圖像類間方差σ最大時(shí),此時(shí)的灰度值T就是自動(dòng)獲得分割圖像的最佳閾值。當(dāng)前景目標(biāo)之間灰度差異很大時(shí),由于算法本身不考慮圖像局部灰度特征,而是縱覽全局得出最合適的閾值,導(dǎo)致部分前景被淹沒(méi)在背景之中。
前景車輛目標(biāo)不可避免的有白色車和黑色車同時(shí)出現(xiàn)的情況,白色車輛的出現(xiàn)使該幀閾值很大,使前景黑色車輛淹沒(méi)在背景之中,非常不利于前景車輛的提取。因此,本文不對(duì)前景信息進(jìn)行絕對(duì)值處理,在前景灰度圖像上進(jìn)行兩次大津算法。如圖4所示,前景圖像灰度直方圖正負(fù)灰度差分布不同,負(fù)數(shù)一邊為車輛顏色低于地面灰度,正數(shù)一邊為車輛灰度高于地面灰度。因高斯分布不同必然導(dǎo)致更新背景閾值不同。因此,本文在灰度分布直方圖上進(jìn)行兩次大津算法,得到兩個(gè)閾值T1、T2,在閾值限制范圍內(nèi)進(jìn)行背景更新。

圖4 本文算法獲取閾值圖
1.1.2 虛擬像素點(diǎn)
考慮到算法本身,當(dāng)視頻檢測(cè)區(qū)域沒(méi)有前景運(yùn)動(dòng)目標(biāo)時(shí),視頻序列當(dāng)前幀與背景做差得到的圖像絕大部分像素點(diǎn)灰度值為零,此時(shí)應(yīng)該提取不到任何前景,但經(jīng)過(guò)大津算法二值化的圖像強(qiáng)制錯(cuò)誤的在灰度值為零左右的點(diǎn)得到閾值,導(dǎo)致全圖像出現(xiàn)噪聲。為了抑制噪聲,我們需要在圖像另一端構(gòu)造出虛擬的前景,從數(shù)學(xué)上看,加入新的高斯分布是為了大津算法能夠找到分割圖像的閾值,而又不破壞背景圖像。本文算法在每幅處理的圖像中加入給定的虛擬像素點(diǎn),這些虛擬像素點(diǎn)加在像素灰度值最大的點(diǎn)上。這些虛擬像素點(diǎn)不在圖像中真正的存在,只是在計(jì)算得到閾值時(shí)遍歷所有灰度中參與運(yùn)算出現(xiàn)。作為虛擬像素點(diǎn),他們的灰度值和數(shù)量這兩個(gè)參數(shù)設(shè)置尤為重。1.檢測(cè)區(qū)域沒(méi)有前景運(yùn)動(dòng)目標(biāo)時(shí),作為虛擬前景物體出現(xiàn),保證自適應(yīng)閾值在一個(gè)合理范圍。2.檢測(cè)區(qū)域有前景運(yùn)動(dòng)目標(biāo)時(shí),虛擬像素點(diǎn)不會(huì)對(duì)自適應(yīng)閾值造成影響。由于虛擬像素點(diǎn)的加入,造出了兩個(gè)高斯分布,滿足大津算法的應(yīng)用要求,將計(jì)算得出的閾值作為背景更新范圍反饋給卡爾曼濾波器進(jìn)行背景更新。
1.2 強(qiáng)制背景更新
在視頻檢測(cè)中,經(jīng)常出現(xiàn)因天氣問(wèn)題造成光照亮度的突然變化,導(dǎo)致路面的灰度變化被當(dāng)做前景物體錯(cuò)誤的檢測(cè)出來(lái),需要將已經(jīng)變化的背景快速更新過(guò)來(lái)。本文為了解決此類問(wèn)題,在卡爾曼濾波中加入了強(qiáng)制背景更新時(shí)間T,t是強(qiáng)制更新的等待幀數(shù),若t小于經(jīng)驗(yàn)值T,認(rèn)為該像素點(diǎn)值為前景車輛,若t大于等于T,認(rèn)為當(dāng)前背景已經(jīng)發(fā)生變化,立即更新背景。
2 仿真驗(yàn)證及結(jié)果分析
采用 VC+ + 9.0在OpenCV圖像開發(fā)包的基礎(chǔ)上實(shí)現(xiàn)本文提出的算法。試驗(yàn)是在 Intel Core i5 CPU,2.67GHz,4GB內(nèi)存,Win7計(jì)算機(jī)上完成。使用的視頻序列的圖像分辨率為640×480,幀率為25fps。圖5為某路段傍晚時(shí)刻視頻加入雙閾值判斷前后處理結(jié)果。對(duì)比發(fā)現(xiàn)本文算法在光線昏暗條件下,背景未受到前景黑色、白色車輛影響,背景更新效果較好。
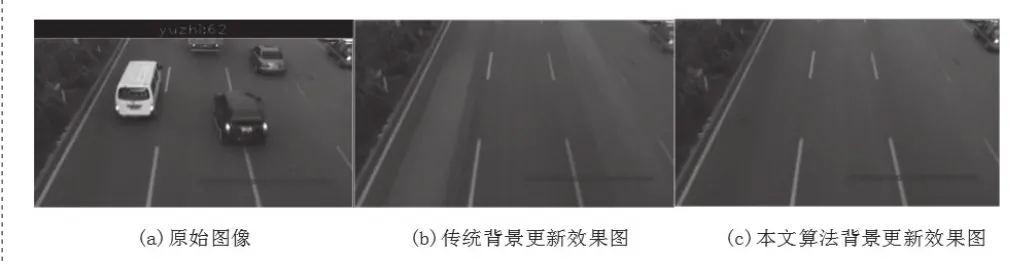
圖5 某路段拍攝視頻
如圖6所示,圖6(b)受到前景車輛的影響,部分背景融入了前景信息,圖6(c)右側(cè)車輛拖影被當(dāng)作前景目標(biāo)檢測(cè)出來(lái),背景更新效果較差。圖6(d)與圖6(e)分別為該幀視頻背景更新效果圖和前景目標(biāo)檢測(cè)效果圖。對(duì)比發(fā)現(xiàn),當(dāng)車流量較大的路段傳統(tǒng)背景更新效果較差,本文通過(guò)選擇性更新及設(shè)定更新閾值方法背景更新效果較好。

圖6 某路段拍攝視頻
3 結(jié)束語(yǔ)
通常學(xué)者僅僅把研究背景模型的重點(diǎn)放在背景更新算法上,常常忽略了如何正確地選取背景進(jìn)行更新,沒(méi)有清晰地劃分前景與背景的界限,再好的更新算法也只會(huì)事倍功半。本文背景模型從選擇背景的更新范圍為突破口結(jié)合大津算法,引入虛擬像素點(diǎn)和雙閾值概念為特點(diǎn),將得到的閾值用來(lái)選擇性更新背景。本文背景模型算法解決了背景因突然光照變化不能及時(shí)更新的問(wèn)題,同時(shí)在光照昏暗及車流量較大的情況下背景更新有較好的適應(yīng)性,并且在車輛長(zhǎng)期停靠和挺靠后駛離監(jiān)控區(qū)域時(shí),能夠及時(shí)快速更新背景,相比傳統(tǒng)背景建模具有較好的普適性。
[1]侯杰虎.基于kalman濾波器的視頻運(yùn)動(dòng)目標(biāo)跟蹤算法研究[D].成都理工大學(xué),2012.
[2]張運(yùn)勝.基于視頻的城市道路交叉口場(chǎng)景中車輛檢測(cè)方法研究[D].東南大學(xué),2016.
[3]鄒承明,李偉.一種改進(jìn)的自適應(yīng)背景更新算法[J].武漢理工大學(xué)學(xué)報(bào),2009,03:45-48.
[4]徐方明,盧官明.基于改進(jìn)surendra背景更新算法的運(yùn)動(dòng)目標(biāo)檢測(cè)算法[J].山西電子技術(shù),2009,05:39-40+71.
[5]陳雷.基于自適應(yīng)背景模型的運(yùn)動(dòng)目標(biāo)檢測(cè)[D].北京交通大學(xué),2016.
猜你喜歡
汽車工程師(2021年12期)2022-01-17 02:29:54
建材發(fā)展導(dǎo)向(2021年6期)2021-06-09 05:57:08
現(xiàn)代國(guó)際關(guān)系(2021年2期)2021-04-13 01:59:16
當(dāng)代陜西(2020年14期)2021-01-08 09:30:42
今日農(nóng)業(yè)(2020年17期)2020-12-15 12:34:28
奧秘(創(chuàng)新大賽)(2020年7期)2020-07-27 08:26:32
中國(guó)外匯(2019年11期)2019-08-27 02:06:32
貴州師范學(xué)院學(xué)報(bào)(2016年4期)2016-12-01 03:54:07
太空探索(2016年10期)2016-07-10 12:07:01
紡織服裝流行趨勢(shì)展望(2016年1期)2016-05-04 03:45:20
