助老伴行機器人的設計開發
2018-06-01 03:11:44,,2,,
機械與電子 2018年5期
,,2,,
(1.西安交通大學機械工程學院,陜西 西安 710049;2. 西安交通大學陜西省智能機器人重點實驗室,陜西 西安 710049)
0 引言
隨著很多國家迅速步入老齡化社會,越來越多的老年人下肢虛弱,但其對自力更生和獨立活動有著強烈的愿望,另外,日益增長的老年人數量導致護理的年輕人員短缺,因此,特別需要開發助老伴行機器人來代替護士和家人照看老年人。世界上很多學者研究了各種老年人助行機器人,主要有Kong J S等人研制的Walking Aid[1],Yuk G H 等人研制的Smart Mobile Walker[2],Lee G 等人研究的JAIST Robotic Walker[3],Asker A 等人研制的老年人多功能移動性輔助設備[4],Moon M K 等人研究的老年人服務機器人[5],上海交通大學初步完成了智能助行機器人概念樣機[6],先后研發了多種型號的WalkMate助行機器人[7],浙江大學研制了一種攙扶助行機器人系統ZJU Walker[8],實驗室研究的第一代助老伴行服務機器人[9]。
現如今助老伴行機器人仍然處于不斷發展中,少數發達國家已投入應用,而我國的助老伴行機器人尚未走出實驗室,沒有成熟的產品,同時助老伴行機器人的市場需求呈現逐年上升趨勢,有著廣泛應用前景。因此開發具有獨立自主知識產權的助老伴行機器人具有深遠意義。
自主開發設計了一臺助老伴行機器人。通過分析老年人日常生活所面臨的困境,確立了主體功能,以此為基礎進行了總體設計;然后對整體結構尺寸以及各功能部件進行了詳細設計;同時還對結構姿態變換控制系統和基于觸覺力的人機交互控制系統進行了設計,基于觸覺力的人機交互控制采用觸覺感知驅動的雙電機差速驅動控制方法,實現機器人的前進、后退、轉彎等動作。最后,搭建了結構姿態變換和在線行走驅動系統兩實驗平臺,驗證機器人結構姿態變換控制系統滿足設計要求以及基于觸覺力的人機交互控制系統確實可行。
1 助老伴行機器人的功能需求分析
老年人多數具有強烈的自主活動愿望,希望能夠在保證安全的前提下盡可能多的接觸社會。所以該助老伴行機器人主要應具備以下幾個方面的功能:
a.助力伴行功能。當老年人想外出行走時,切換到助力伴行姿態,利用水平扶手進行助力支撐,幫助老年人自主行走。
b.輪椅輸送功能。當老年人活動疲憊后,可以切換到輪椅輸送位姿,姿態降低,座椅自動滑出,為老年人進行代步輸送。
c.輔助起、坐功能。大多數老年人由于腿部力量減退、平衡能力下降等因素,在由站立狀態轉換為坐立狀態或者由坐立狀態轉換為站立狀態時常常需要外部裝置的助力或者依靠他人的攙扶,所以助老伴行機器人還應具備輔助起、坐的功能。
d.安全保障功能。老年人易摔傷的特點決定助老伴行機器人應具備防摔等安全保障功能。
2 助老伴行機器人的總體設計
依據助老伴行機器人的功能需求,從人機工程學的角度,考慮宜人化、安全性、輕便性等要求,對其進行了總體設計,如圖1所示。主要由行走驅動部分、姿態變換機構、分體環繞式鎖止防摔機構、座椅收展驅動機構等4個主要功能模塊組成。

圖1 助老伴行機器人的總體三維示意
采用雙人字形主體結構,前后支腿間設置有直線推桿,實現輪椅輸送、助力伴行兩種姿態間的轉換;采用雙輪轂電機驅動,雙輪差速轉向控制,轉向靈活;機器人前端左右對稱的把手上安裝有觸覺力傳感器,用于感知老年人的行走意圖;把手內側附近安裝有控制按鈕,包括電源開關、姿態轉換開關、有級調速按鈕等;還設置有座椅自動翻折機構,采用直流電機驅動;支撐扶手采用前后可分離可鎖緊的環形結構;在前支腿底側內部空間內設計了電源托架,用于安裝蓄電池。
3 助老伴行機器人的機械本體設計
3.1 整機結構尺寸設計
考慮對不同身材老年人的兼容性以及環形扶手的內部應有足夠的空間。助力伴行姿態扶手臂極限高度為1 150 mm,前后輪跨距650 mm,可以通過主推缸的調節作用將扶手高度調節到800 mm左右,基本可以實現對身高在150~180 cm的老年人實現助力伴行;輪椅輸送姿態扶手臂處于最低位置為740 mm,座椅平面高度為500 mm左右,前后輪距1 230 mm。扶手內部空間為左右寬500 mm,前后距離640 mm,而一般老年人群身體寬度為300~450 mm,機器人內部空間充足。
3.2 姿態變換機構設計
為了使助力伴行和輪椅輸送兩種姿態間的切換自然、宜人,設計了雙人字形支腿結構,如圖2為機器人姿態變換機構模型圖。該機構主要包括前支腿、后支腿、扶手臂、萬向輪安裝板、3組直線推桿。

圖2 姿態變換機構模型
前后支腿一端通過鉸鏈連接,另一端通過直線推桿連接,直線推桿的伸縮運動可以起到調節機器人整體高度的作用。在圖示位置添加了直線推桿裝置,通過調節扶手臂與前支腿之間的夾角來保證扶手臂軸線始終處于水平狀態;為了保證萬向輪在姿態變換前后轉向的靈活性與可靠性,安裝軸應始終保持在與地面垂直方向上,所以在后支腿的底部與萬向輪安裝板之間也設置了一對直線推桿裝置。
3.3 分體式環繞鎖止防摔機構設計
該助老伴行機器人借助左右對稱的支撐扶手形成四周環繞的防護支撐結構,可以起到有效的助力支撐和摔倒防護的作用。圖3為環形扶手支撐防摔機構圖,包括扶手墊、扶手前臂、扶手后壁及扶手鎖止機構4個部分。其中扶手鎖止機構包含鎖止銷、回位彈簧、解鎖鍵等零件。按動解鎖鍵,通過杠桿原理將鎖止銷下壓解開前后扶手臂之間的鎖定;松開解鎖鍵,鎖止銷在回位彈簧的作用下伸出并與扶手前臂相應位置的鎖止銷孔配合,將前后扶手臂鎖定為一體。

圖3 環形扶手支撐防摔機構
3.4 座椅收展機構設計
座椅收展機構采用電動收展座椅設計,利用電機-齒輪-齒條機構可以使座椅自動收起折疊和伸展,如圖4。主要包括座椅支架、座椅、直流電機、傳動系統等,其核心采用電機-齒輪-齒條結構的動力傳輸機構。圖示兩副座椅支架分別和所在一側的人字形支腿、后備箱固定連接,直流電機通過電機支架固定在座椅內部。

圖4 座椅收展機構
3.5 電源設計
為了滿足續航要求、盡可能減小電源尺寸和滿足結構的穩定安全性,選擇QY-24V-80Ah鋰電池。該電池輸出電壓24 V,蓄電量80 Ah,按照驅動輪選型功率240 W計算,續航時間可以達到8 h,續航里程25 km,續航能力充足。
4 助老伴行機器人的控制系統設計
4.1 機器人結構姿態切換控制系統設計
結構姿態切換控制系統如圖5,主要包括24 V直流電源、2個自復位點動開關、1個開關電路、4個普通直流電機驅動器模塊、3組電動推桿、1個用于驅動座椅的直流電機。
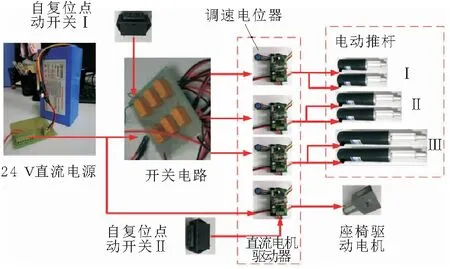
圖5 機器人結構姿態切換控制系統
其中自復位電動開關是輸入端,普通直流電機驅動器由兩部分組成:一個是控制電機方向的驅動橋電路,方向控制信號由開關電路輸出,另一個是調節電機速度的脈寬調制(PWM波)電路,其核心是12F615單片機;另外,3個直流電機驅動模塊的方向控制信號輸入端不能直接并聯,如果直接并聯將會導致電位器不能獨立控制與該模塊相連的該組電動推桿的速度,所以借助繼電器的電氣隔離功能設計相應的開關電路。
4.2 基于觸覺力的人機交互控制系統設計
如圖6為基于觸覺力的人機交互控制系統圖。主要包括24 V直流電源、±5 V電源模塊、觸覺力檢測電路、Ardunio、無刷直流驅動器、輪轂電機。
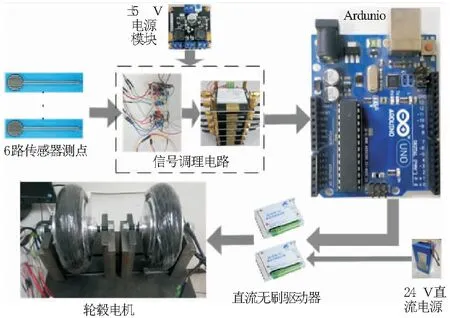
圖6 基于觸覺力的人機交互控制系統圖
采用觸覺感知驅動的雙電機差速驅動控制方法,實現機器人的前進、后退、轉彎等控制。依據兩把手觸覺力大小來判斷對應側輪轂電機正反轉或停止轉動,進而實現機器人前進、后退、轉彎等動作。
5 樣機搭建與性能測試分析
5.1 結構姿態變換實驗驗證
為了檢驗所設計的助老伴行機器人結構姿態變換的效果,搭建了機器人結構姿態變換實驗平臺。通過姿態調整開關完成助力伴行姿態和輪椅輸送姿態之間的切換,同時,機器人在完成自身結構姿態變換時,還起到了輔助老年人站立的作用。
實驗結果表明,該機器人可以流暢的在兩種姿態間切換,電動座椅收展自如。機器人從一種姿態向另一種姿態連續切換所花費的時間為13 s,姿態變換控制系統滿足設計要求。助力伴行姿態下的扶手臂極限高度為1 155 mm;輪椅輸送狀態下的扶手臂高740 mm,座椅高度為510 mm。通過姿態調整,該機器人可以適應身高在150 ~180 cm范圍內的老年人。
5.2 在線行走驅動實驗驗證
為了檢驗所設計的基于觸覺力的人機交互控制系統的有效性。搭建了在線行走驅動系統實驗平臺。 行走驅動系統的輸入為人機觸覺力信號,且6路觸覺力信息需要先整合FL和FR兩路數據。通過串口通信工具采集機器人8種運動狀態下經Ardunio處理后的FL、FR兩路數據信息,如圖7。
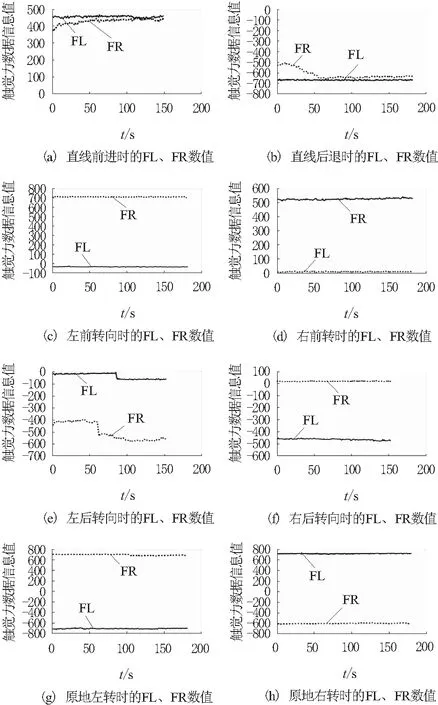
圖7 助老伴行機器人8種運動狀態下的FL、FR數值
從圖7可以看出,由以上8種狀態下左右觸覺力FL、FR數據可以看出,將閾值τ設置在100到300之間既可以準確識別以上8種運動狀態。綜合考慮,在本系統軟件中采用200作為閾值。即:當FL或FR的值大于200時,判斷對應側輪轂電機正轉;當FL或FR的值小于-200時,判斷對應側輪轂電機反轉;當FL或FR的值在200~-200之間時,判斷對應側輪轂電機停止轉動。
將2種姿態下的速度進行區分,即助力伴行姿態下機器人運行速度較慢,而輪椅輸送姿態下其運行速度較快。具體體現在Ardunio的輸出指令信號PWM波上:在實驗過程中,在助力伴行姿態下,不管電機是正轉還是反轉PWM波占空比均設定為30%;在輪椅輸送姿態下,PWM波占空比設定為70%。,輪椅輸送姿態下4種狀態的PWM波形如圖8所示,其他4種狀態下的波形類似。
實驗結果表明,使用者操縱的方向與實際機器人運行的方向基本吻合,實現前進、后退、左轉、右轉、停止五種基本狀態及其它們的組合的有效判別,正確率達到96.1%,如表1所示。因此說明本文所設計的基于觸覺力的人機交互控制系統切實可行;助行最大速度8 km/h,負載能力最大100 kg,360°零半徑自由旋轉,續航里程25 km。

圖8 助老伴行機器人輪椅輸送工況下的PWM波形
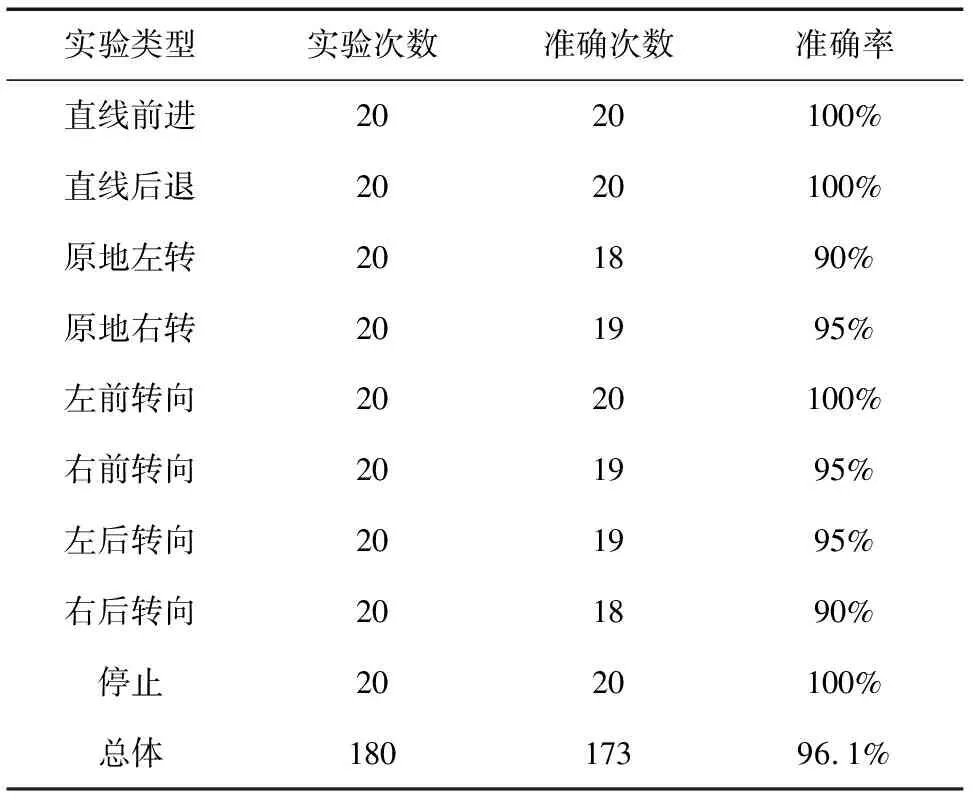
實驗類型實驗次數準確次數準確率直線前進2020100%直線后退2020100%原地左轉201890%原地右轉201995%左前轉向2020100%右前轉向201995%左后轉向201995%右后轉向201890%停止2020100%總體18017396.1%
6 結束語
為了解決老年人的戶外出行問題,自主開發設計了一臺助老伴行機器人,該機器人具有助力伴行和輪椅輸送等功能。對機器人的整體、各功能部件和控制系統進行了具體的設計。最后,搭建實驗平臺對機器人的功能進行了試驗驗證。結果表明,機器人能夠很好地滿足老年人的戶外行走需求,其在線行走驅動實驗的準確率達到了96.1%,可行性較高。目前機器人可以實現基本功能,但仍存在以下不足:機器人過于笨重,不能隨意的存放和移動;沒有考慮老年人的舒適性。基于此,未來將從機器人的輕量化和舒適性兩個方面進行相應的研究。
參考文獻:
[1] KONG J S, LEE D K, NAM Y S, et al. Optimized walking will recognizing system of the walking aid with the fuzzy algorithm[J]. Korean Institute of Intelligent Systems, 2008(18): 692-699.
[2] YUK G H, PARK H S, DAN B J, et al. Development of smart mobile walker for elderly and disabled[C]// The 22nd IEEE International Symposium on Robot and Human Interactive Communication Gyeongju, Korea,2013: 300-301.
[3] LEE G, OHNUMA T, CHONG N Y, et al. Walking intent-based movement control for JAIST active robotic walker[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2014, 44(5): 665-672.
[4] ASKER A, ASSAL S F. Kinematic analysis of a parallel manipulator-based multi-function mobility assistive device for elderly[C]// Proceedings of IEEE International Conference on Advanced Intelligent Mechatronics, 2015: 676-681.
[5] MOON M K, KIM S C. Usability evaluation of movement support service robot for elderly[M].Advances in Ergonomics Modeling, Usability & Special Populations, Springer International Publishing, 2017.
[6] 平偉.智能助行機器人概念樣機設計[D].上海:上海交通大學,2009.
[7] ZHANG L, CAO Q X, LENG C T, et al. The development of walking assistant robot for the elderly[J]. Key Engineering Materials, 2011, 467-469: 1893-1898.
[8] 方芳,周武嘯,韋巍,等.助行機器人系統設計[J].傳感器與微系統,2010,29(8):120-122.
[9] 魏曉娟.助老助行機器人的觸滑覺驅動控制技術研究[D].西安:西安交通大學,2012.
猜你喜歡
英語世界(2022年9期)2022-10-18 01:11:18
保健醫苑(2022年1期)2022-08-30 08:40:44
保健醫苑(2022年6期)2022-07-08 01:25:16
保健醫苑(2022年4期)2022-05-05 06:11:20
金橋(2020年9期)2020-10-27 01:59:44
中學生數理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2018年1期)2018-04-12 06:44:24
商周刊(2017年17期)2017-09-08 13:08:58
海峽姐妹(2017年7期)2017-07-31 19:08:17