自變位履帶式管道機器人動力學分析及仿真研究
2018-06-04 12:02:26趙棟
機械工程與自動化 2018年3期
關鍵詞:檢測
趙 棟
(中國電子科技集團公司 第三十九研究所,陜西 西安 710065)
0 引言
管道是天然氣重要輸送工具之一,近幾十年來,隨著科技的進步和能源消耗的增加,管道運輸技術取得了長足進步[1]。由于天然氣管道一般深埋在地下、海底或者建筑物中,難以檢測、清掃和維修,一旦管道污染、腐蝕或破損就會引起運送物質的污染,甚至管道系統的崩潰,造成巨大的經濟損失或危害人類健康安全[2]。由于管道所處環境復雜,工作人員不宜甚至不能進入其中進行作業,而管道機器人能進入人所不及、復雜多變的非結構化管道環境中,通過攜帶的無損檢測裝置和作業裝置,完成管道的檢測、清掃和維護等任務[3]。因此,對管道機器人進行動力學分析及仿真具有重要的現實意義。
在管道機器人運動仿真方面,唐鵬等人以管道檢測機器人在管道中力和力矩動態平衡理論為基礎,提出了一種求解四驅管道機器人的動力學理論算法,此動力學理論方法可以很好地解決管道檢測機器人在運動過程中的力平衡計算問題[4]。白麗平從機器人動力學參數設計角度出發,利用動力學仿真分析軟件ADAMS建立了120點焊機器人的動力學仿真模型,并提出了無路徑的搜索方法,在全部的機器人工作空間內進行仿真搜索,最終求取機器人關節驅動力矩的極限值[5]。趙玉俠等人在ADAMS環境下建立了小口徑六輪機器人運動模型,創建了相應的仿真環境,并進行了三維實體運動仿真,通過對質心處的位移、速度、加速度曲線以及對彈簧的力和驅動力矩曲線的分析,證明該六輪機器人在直管道內的移動具有基本的運動穩定性和可行性[6-7]。本文利用ADAMS軟件對自動變位履帶式管道內檢測機器人在豎直彎管內的運動進行仿真,為后續的實驗研究提供理論基礎。
1 管道機器人建模和仿真
1.1 虛擬樣機建模
本文的研究對象是帶擺腿機構的自動變位履帶式管道機器人,該結構便于管道機器人在變直徑圓形管道內順利通行,同時具備大力矩輸出,使其具有較高的越障能力;通過調節支撐頂部履帶足的兩個支撐臂的張開角度,來調節管道機器人的高度,使其具有適應不同管道直徑與垂直管道行走能力;利用傳感器系統感知自身重心的變化,自適應調整履帶速度,可以實現由水平布置向垂直方向管道的平穩過渡;同時為了使管道機器人具有防爆功能,機器人主體采用隔爆外殼并攜帶本安型傳感器;此外,為了提高管道機器人的防側傾能力,在機器人兩側裝有桿式防側傾裝置。
本文的管道機器人模型在UG中繪制而成,然后進行裝配,如圖1所示。
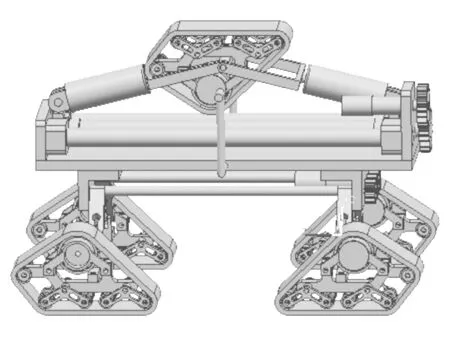
圖1 管道機器人虛擬樣機模型
1.2 ADAMS運動仿真
本文首先對底盤機構和支撐機構分別進行運動仿真,以分析其運動學特性;然后將其整機置于豎直彎管中進行動力學仿真,以分析其在不同的管道環境中的動力學特性。
1.2.1 底盤機構運動仿真
由于底盤機構零件較多,添加運動副較困難,因此先將無相對運動的零件進行布爾求和,將其簡化為9部分:履帶輪1、履帶輪2、履帶輪3、履帶輪4、前擺腿、后擺腿、電機、惰輪和上板,如圖2所示。
添加運動副(5個固定副、4個轉動副、3個齒輪副)后,給電機添加10°/s的旋轉驅動,只在重力作用下,設置時間為4 s,步數為100步,對其進行運動仿真,可得到履帶輪1質心處的Z向位移、速度和加速度曲線,如圖3所示。
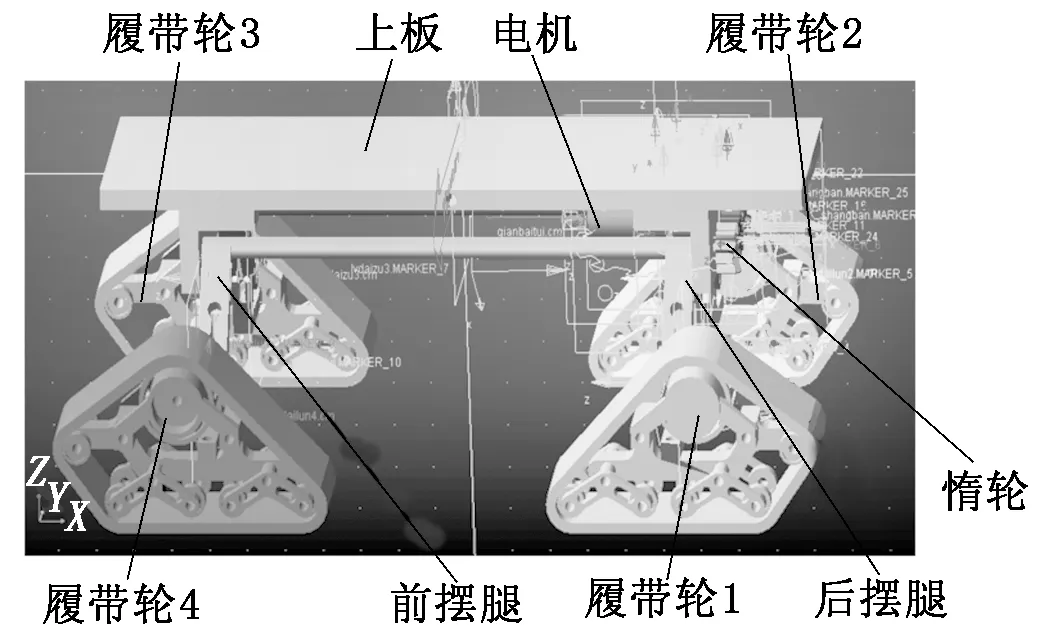
圖2 簡化后的底盤機構
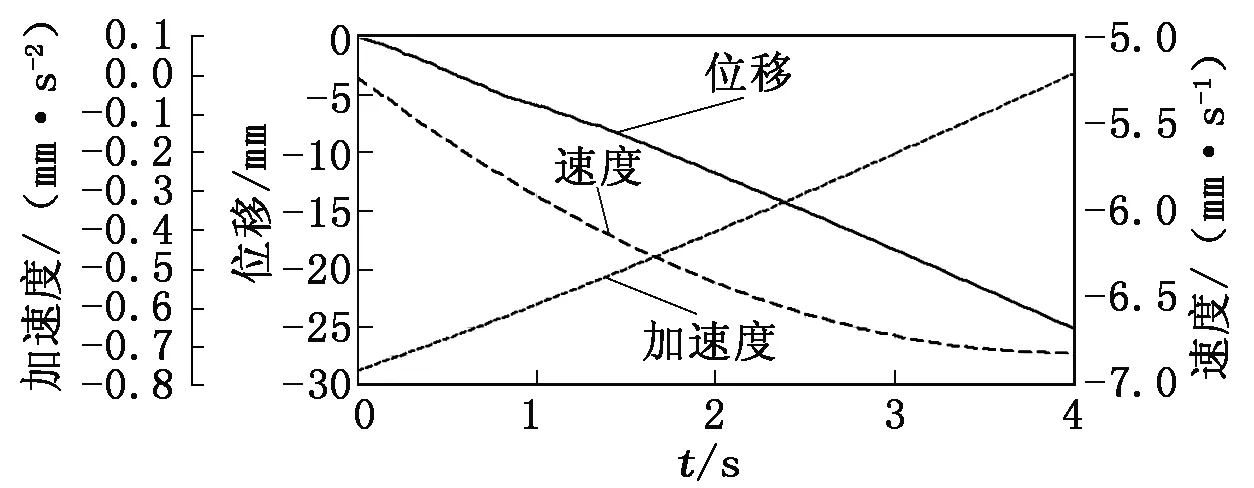
圖3 履帶輪1質心處的Z向位移、速度和加速度曲線
1.2.2 支撐機構運動仿真
支撐機構可簡化為8部分:底板、電機、絲杠、左滑塊、右滑塊、左支撐臂、右支撐臂和履帶輪5,如圖4所示。
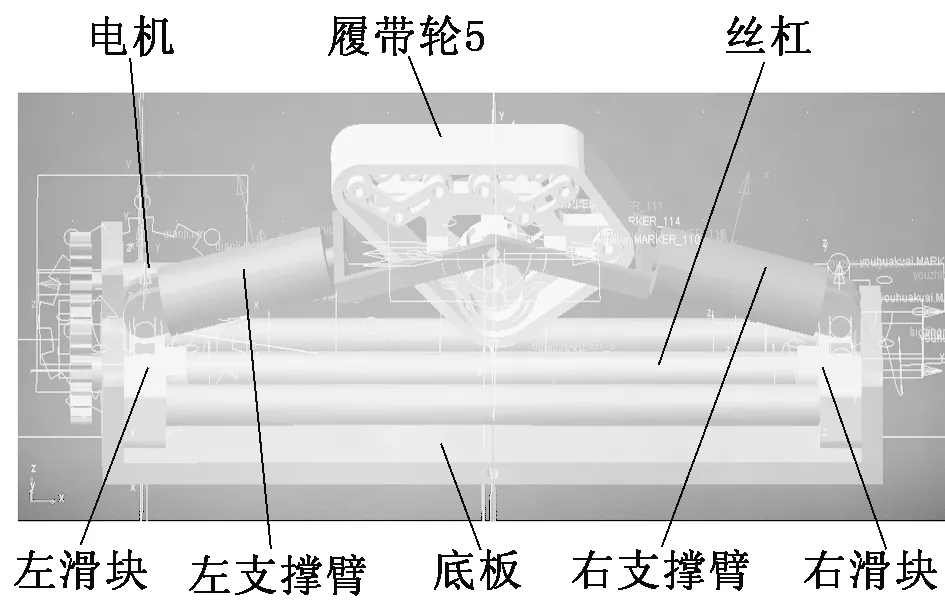
圖4 支撐機構簡化圖
添加運動副(1個固定副、6個轉動副、2個移動副、2個螺旋副、1個齒輪副)后,給電機添加30°/s的旋轉驅動,只在重力作用下,設置時間為1 100 s,步數為1 000步,對其進行運動仿真,可得到履帶輪5質心處的Z向位移、速度和加速度曲線,如圖5所示。
1.2.3 豎直彎管中運動仿真
彎管的尺寸如圖6所示,其內徑為346 mm,外徑為366 mm,將機器人置于其中,如圖7所示。
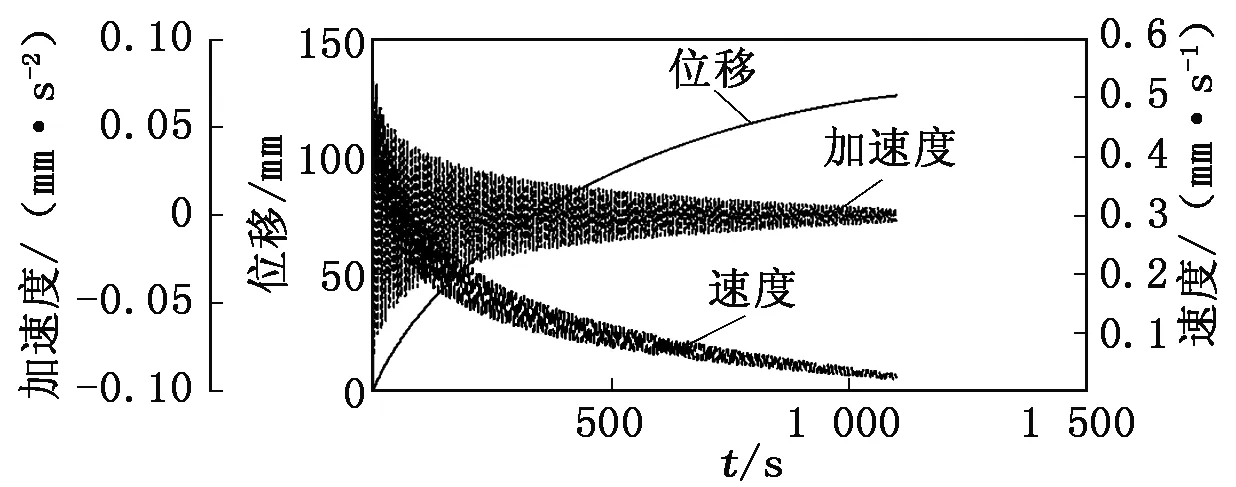
圖5 履帶輪5質心處的Z向位移、速度和加速度曲線
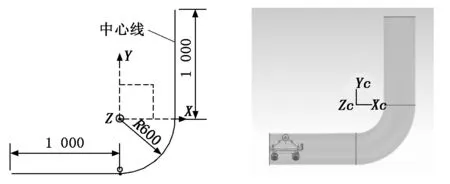
圖6 彎管尺寸 圖7 機器人在彎管內的姿態
將管道機器人簡化為6部分:機體、履帶輪1、履帶輪2、履帶輪3、履帶輪4、履帶輪5。給其添加運動副(1個固定副、5個轉動副),給履帶輪分別添加驅動力矩(5 Nmm),將履帶輪柔性化,添加接觸力(Flex Body to Solid),添加X向單向力3.4 N。為了使履帶輪和管道間更好地接觸,在機體和履帶輪5之間添加拉壓彈簧阻尼器,如圖8所示。
在重力作用下,設置時間為190 s,步長為0.5,對其進行運動仿真(如圖9所示),可得到管道機器人質心處的X、Y、Z向位移、速度和加速度曲線,如圖10~圖12所示。
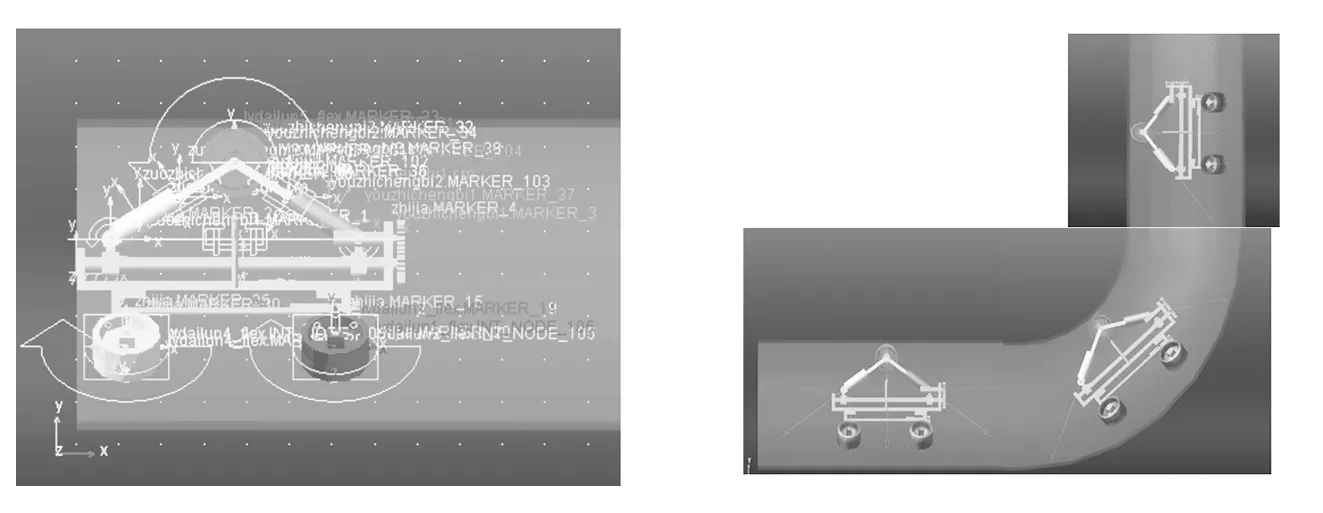
圖8 添加約束和力后的管道機器人 圖9 管道機器人在彎管內的運動仿真

圖10 管道機器人在彎管中運動時的X、Y、Z向位移曲線 圖11 管道機器人在彎管中運動時的X、Y、Z向速度曲線 圖12 管道機器人在彎管中運動時的X、Y、Z向加速度曲線
管道機器人在彎管內運動時的接觸力、扭矩和驅動力曲線如圖13~圖17所示。

圖13 管道機器人在彎管中運動時履帶輪1X、Y、Z向接觸力曲線 圖14 管道機器人在彎管中運動時履帶輪5的X、Y、Z向接觸力曲線 圖15 管道機器人在彎管中運動時履帶輪1的 X、Y、Z向扭矩曲線
2 仿真結果驗證
由于轉彎時機器人的內外側履帶輪的速度不同,因此可以將機器人簡化為如圖18所示[8]。圖18中,O為轉動中心,v1、v2分別為兩邊履帶的速度矢量,vG為機器人重心的速度矢量,R為機器人所在管道的彎曲半徑,h為機器人高度,d為機器人中心與頂部的距離,由相似三角形理論[9]可得:
(1)
(2)
將上、下履帶輪及機器人質心的速度放在一起對比,如圖19所示。
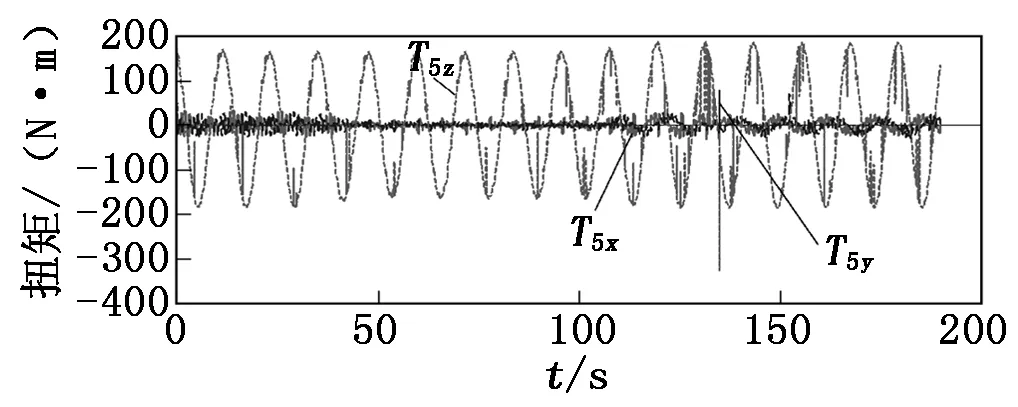
圖16 管道機器人在彎管中運動時履帶輪5的X、Y、Z向扭矩曲線
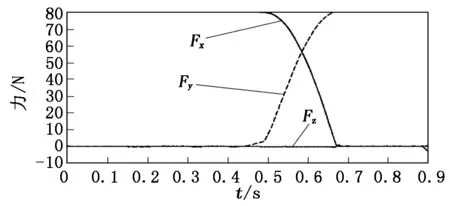
圖17 管道機器人在彎管中運動時的X、Y、Z向驅動力曲線
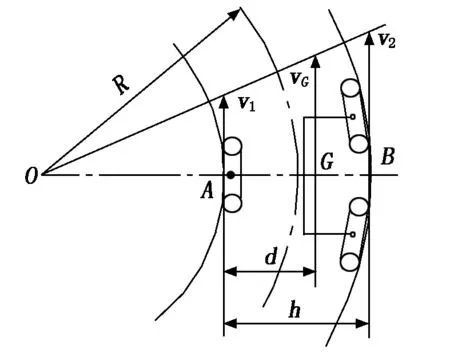
圖18 機器人轉彎示意圖
由式(1)、式(2)計算出v1、v2的值,將運動仿真值與計算值進行對比,如表1所示。從對比結果可以看出,仿真結果與計算值相近,從而證明了仿真過程的正確性。
3 仿真結果分析
通過對底盤機構和支撐機構的運動仿真分析,可得出該自動變位履帶式管道內檢測機器人在自適應管徑的調整過程中運動平穩,符合設計要求。
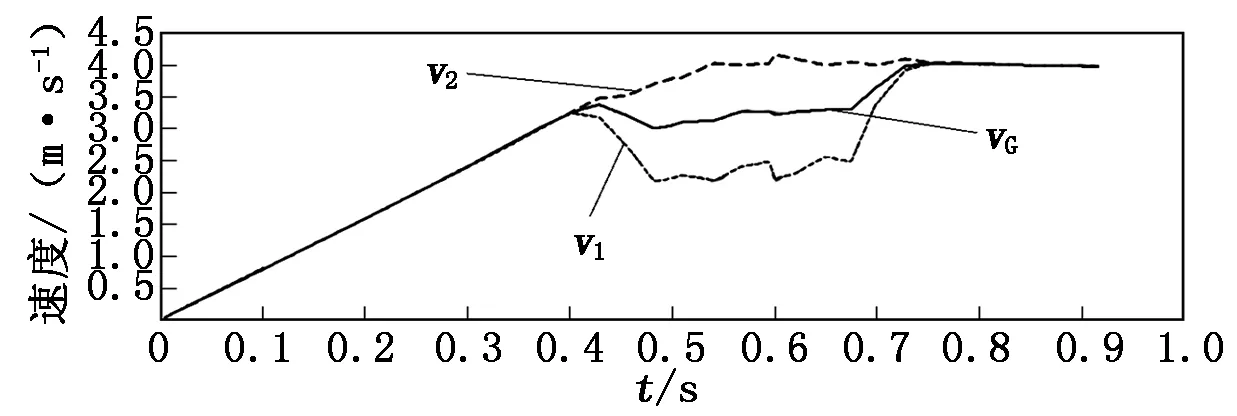
圖19 轉彎時上、下組輪及質心的速度
通過對管道機器人在豎直彎管內的運動仿真分析,可知其質心處的位移、速度、加速度以及驅動力矩曲線變化平穩,符合設計要求;轉彎時上、下履帶輪的速度與理論計算結果一致,證明了運動仿真的正確性。
4 結語
本文實現了管道檢測機器人在豎直彎管內的運動仿真,分析了機器人的動態運動特性,驗證了理論分析的合理性,為原理樣機的結構設計提供了理論依據,大大縮短了管道檢測機器人的開發時間,提高了產品質量。
參考文獻:
[1] 常玉連, 邵守君, 高勝. 石油工業中管道機器人技術的發展與應用前景[J].石油機械,2006(9):122-126.
[2] 曹建樹,林立,李楊,等.輸氣管道機器人技術研發進展[J].油氣儲運,2013(1):1-7.
[3] 毛立民.通風管道清洗機器人專利技術研究與應用[J].清洗世界,2004,20(5):58-60.
[4] 唐鵬,石成江,劉占民,等.基于ADAMS的管道檢測機器人動力學分析及仿真[J].機械設計與制造,2012(7):150-152.
[5] 白麗平.基于ADAMS的機器人動力學仿真分析[J].機電工程,2007(7):74-77.
[6] 趙玉俠,狄杰建,高德文.基于ADAMS的微型管道機器人三維實體運動仿真[J].實驗室研究與探索,2011,30(1):26-29.
[7] Kwon Young-Sik,Yi Byung-Ju.Design and motion planning of a two-module collaborative indoor pipeline inspection robot[J].IEEE Transactions on Robotics,2012,28(3):681-696.
[8] 游世明,陳思忠,梁賀明.基于ADAMS的并聯機器人運動學和動力學仿真[J].計算機仿真,2005(8):181-185.
[9] 王濤.履帶式移動機器人虛擬樣機與動力學分析[D].南京:南京理工大學,2007:26-28.
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
