螺旋升運式谷物產量傳感器試驗研究
2018-06-06 08:01:11黃操軍劉金明韓東來
農機化研究 2018年5期
關鍵詞:產量
趙 晨,黃操軍,劉金明,韓東來
(1.黑龍江八一農墾大學 信息技術學院,黑龍江 大慶 163319;2.黑龍江省八五九農場,黑龍江 佳木斯 156326)
0 引言
自動化的谷物產量測量是實行精準農業收獲階段的重要組成部分,且產量的高低同樣能夠集中體現谷物的生長和管理狀況,而收獲機械的實時產量的測量一直是農業生產中的難點。所以,獲取準確的產量空間分布信息是實施精準農業的關鍵[1]。國內外許多研究學者提出了許多產量監測方法和谷物產量模型,但測產的精度及模型的通用性及實用性由于受到各種各樣因素的影響,目前還不能完全適用于生產和農戶應用。在國外,一些知名公司(如Ag Leader、Micro Track、CASE IH)的收獲機上都裝有自行研制的測產系統。周俊、胡均萬、陳樹人等[2-4]設計了一種以平行梁結構的沖量式谷物流量傳感器作為測產核心的產量監測系統,并在其后進行了改進研究。雖然沖量式傳感器價格低廉、安裝方便;但測量谷物產量時,受機車、升運器振動及機車傾斜角度影響較為嚴重,測產誤差也較高。馬朝興、付興蘭[5-6]提出采用光反射原理的傳感器進行谷物層厚度測量,同時通過谷物容重和輸送速度來進行測產;其缺點在于傳感器容易受到谷物厚度影響,且升運形式為刮板式,傳感器在升運器底部進行測量,而到達頂端時由于機身抖動,一部分谷物則會落回糧倉內,致使測量精度降低。張小超等[7]設計了稱重式谷物流量傳感器,對產量信號進行處理以后,達到一定的測產要求,但同樣容易受到機車振動的影響。
上述所介紹的谷物測產方法研究一定程度上能夠滿足生產要求,但仍然不盡如人意。通用的局限性、設備安裝的繁瑣程度及谷物流量傳感器的設計成本,約束了各類測產監測系統在實際應用中的發展[8]。為此,本文對筒腔內的谷物進行了一般動力學和穩定輸送情況下的動力學分析,建立了一套根據輸送電機參數計算谷物產量的研究方法。同時,設計出一種基于螺旋輸送機的谷物測產監測系統,通過采集電機的電壓、電流及轉速等實時參數計算輸送谷物的瞬時質量。
1 總體設計
本文旨在研究和設計谷物產量實時監測系統,整體硬件系統如圖1所示。該系統由下位機和上位機共同完成:下位機部分與螺旋輸送機一起工作,通過設置PWM的占空比調節傳動電機進行了閉環調速,能夠對系統傳動電機的電流、轉速信息進行實時采集,并通過OLED液晶屏顯示,設計了一組人機交互按鍵,操作簡單、清晰明了;上位機部分由PC機和無線接收模塊組成。傳動電機的相關參數經過MCU處理后,通過無線通信模塊發送給上位機,串口助手對數據進行存儲,并對傳輸數據進行分析。

圖1 硬件系統框圖Fig.1 The block diagram of hardware system
2 谷物在螺旋升運器中的動力學分析
2.1 谷物在絞龍輸送過程中的一般動力學分析
設絞龍螺旋的中軸直徑為2r1,葉片外徑為2r2,螺距為l。以距離葉片中軸線距離為r的谷物顆粒m為分析對象,絞龍轉軸的旋轉運動為牽引運動,m相對于螺旋的運動為相對運動,建立了ox′y′z′作為運動參考坐標系對谷物m進行動力學分析,如圖 2所示[9]。
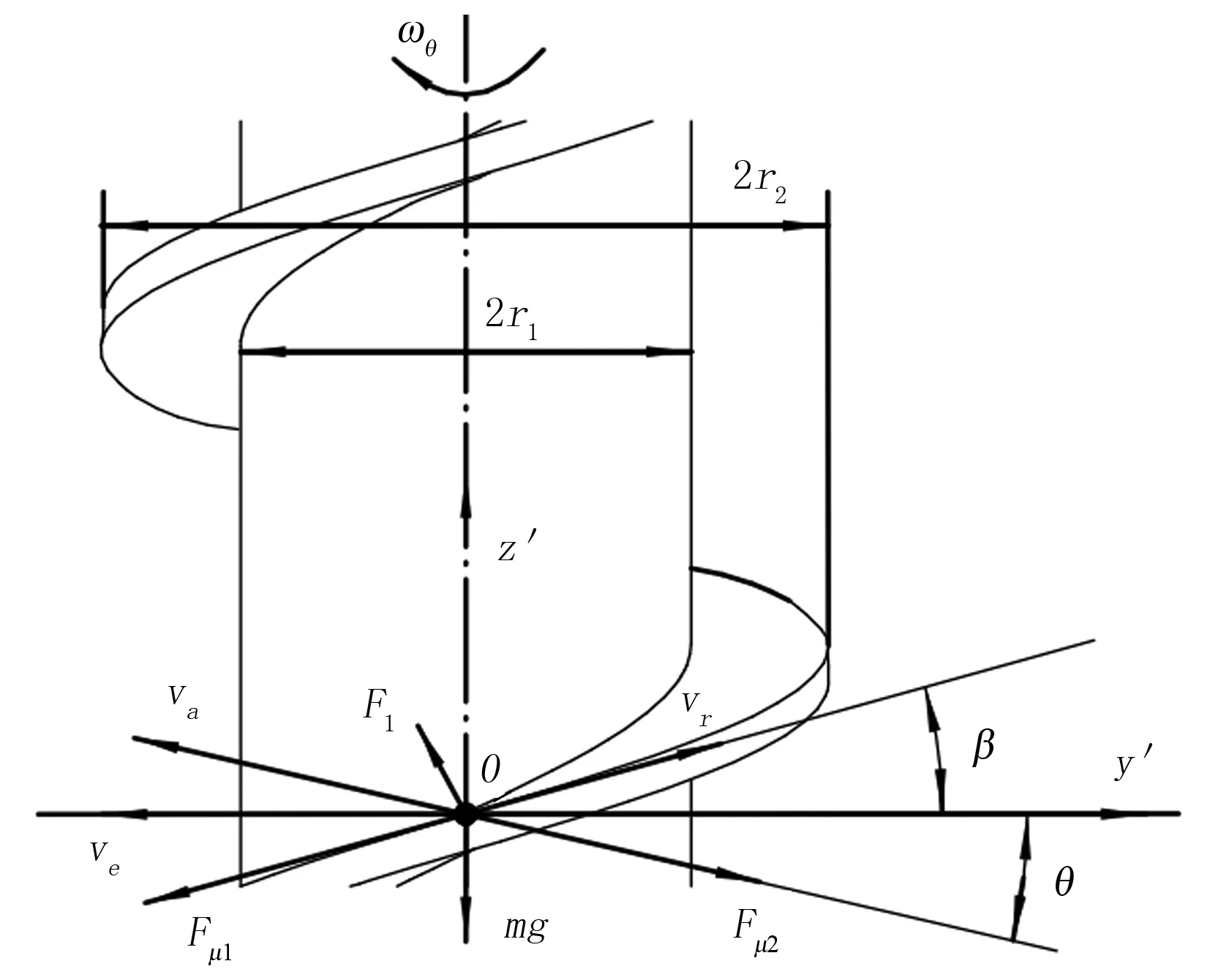
(a) 沿-x′軸方向

(b) 沿-y′軸方向圖2 谷物顆粒m的動力學分析Fig.2 The kinetic analysis of cereal grain m
假設谷物與葉片之間的動、 靜摩擦因數相同,圖2中的各個物理量的意義如下:mg為重力;μ1為谷物顆粒與絞龍葉片之間的摩擦因數;μ2為谷物顆粒的內摩擦因數;F1為絞龍葉片的法向力;Fμ1為葉片的切向摩擦力;F2為外側物料的徑向支撐力;Fμ2為外側谷物的切向摩擦力;g(r)為絞龍的轉速;Ve為顆粒在m點處的牽引運動線速度;vr為相對運動的線速度;va為谷物顆粒m的絕對線速度;Fge為牽引慣性力;FgC為科氏慣性力;β為絞龍葉片的升角;θ為谷物顆粒絕對運動的升角。
2.2 絞龍在穩定輸送過程中的動力學分析
對谷物顆粒沿著鉆桿穩定輸送狀態下進行分析。在絞龍輸送過程中,緊貼旋轉葉片的谷物由于慣性不會脫離葉片,其與葉片的相對運動為沿著葉片的螺旋線向上運動,絕對運動為螺旋上升運動[10]。與臨界狀態相比,物料的動力學變化還有:①科氏加速度、科氏慣性力值不為 0;②筒壁對物料的摩擦力改向,與物料的絕對運動速度方向相反。若將物料螺旋運動分解為繞鉆桿軸線的轉動和沿鉆桿軸線的直線運動,則其轉速和軸向直線運動速度的值均穩定不變。穩定輸送時物料顆粒m的各力的方向情況為:mg為z′軸負向;F1為葉片法向;Fμ1=μ1F1為相對速度的反向;F2為x′軸負向;Fμ2=μ2F2為與谷物顆粒m運動方向相反;Fge為x′軸正向;FgC=2mrωeωr為x′軸負向。
將加速度投影到x′、y′、z′軸上,有
(1)
(2)
(3)
將ωr表示為谷物顆粒與螺旋葉片的相對轉速,則谷物顆粒的絕對轉速為:ωa=ωe-ωr。谷物顆粒絕對速度va沿圓周方向的分量和沿軸向的分量大小為
va-y=r·ωa=r(ωe-ωr)
(4)
(5)
谷物相對于螺旋葉片做穩定運動時,3個軸方向的相對加速度分量大小為
ar-x′=mrωr2
(6)
ar-y′=ar-z′=0
(7)
將式(1)至式(7)合并,有
用葉片螺旋升角的三角函數以半徑和螺距代替,綜上可得,絕對角速度與牽引角速度滿足以下關系,即
=9.8
(8)
當螺旋絞龍的參數及谷物顆粒性質確定時,式(8)可表示為
f(ωe,ωa,r)=
(9)
式(9)是對谷物在單頭螺旋穩定輸送狀態下進行相對運動動力學分析得到的結果,表達了谷物顆粒的絕對轉速與螺旋轉速及物料顆粒距離軸心距離r之間的數學關系[11]。當螺旋的轉速ωe確定時,谷物顆粒dm沿軸向運動的線速度是r的函數,以g(r)表示。
絞龍輸送的截面示意圖如圖3所示。輸送是一個連續不斷的過程,距離軸線r處的所有谷物顆粒的運動參數一致,即圖2中微小寬度dr的環形區域內谷物的速度大小相同。對于軸心半徑為r1、螺旋外徑為r2的螺旋,則單位時間下整個螺旋輸送截面區域內輸送的谷物體積為

(10)
其中,g(r)為谷物軸向速度與距軸心之間距離r的函數;r1為螺旋中心轉軸半徑;r2為螺旋葉片外徑。
式(10)反映了單位時間內截面區域內的輸送的谷物體積,若谷物收獲時的含水率已知(即谷物密度ρ已知),則單位時間內的截面區域的谷物質量△m可得,由此推算出絞龍在輸送谷物時的做功,即
(11)
其中,M為螺旋升運器單位時間內輸送的總質量;Vi為單位時間內螺旋截面的輸送體積;s為螺旋升運器的螺距;N為螺旋輸送器中的螺距個數;mi為單位時間下螺旋輸送截面區域內輸送的谷物質量;g為重力加速度;l為絞龍輸送的長度;θ為輸送絞龍與水平面的夾角;U為絞龍輸送電機的電壓;Ii為單位時間絞龍輸送電機的瞬時電流;t為絞龍輸送過程中做功的單位時間,分為n份。

圖3 絞龍輸送的截面圖Fig.3 The sectional drawing of auger transmission
3 硬件設計
3.1 電機驅動電路及電流監測模塊
圖4中,U4為線性光耦,PWM為低電平有效。由于MCU的IO口直接驅動MOSFET容易燒毀單片機,光耦導通后MOSFET的柵極和源極電壓達到MOSFET的導通條件,MOSFET的漏極和源極導通,電機導通。
電源監測模塊采用集成WHB20LSP5S2H型霍爾效應原理-閉環電流傳感器;WHB20LSP5S2H能在電隔離條件下測量直流、交流、脈沖,以及各種不規則波形的電流;單電源工作時由+5V DC供電,其具有高精度,良好的線性與響應時間、低功耗、良好的過載能力,以及很高的穩定性與極佳的抗干擾能力等優良特性。絞龍電機中電流流經WHB20LSP5S2,模塊輸出電壓信號經過RC濾波后送入單片機ADC進行計算,如圖4所示。
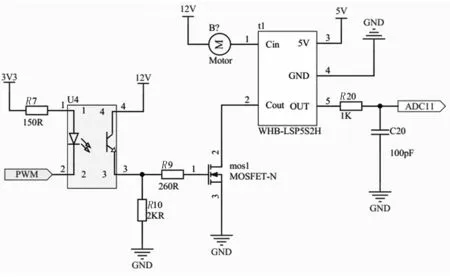
圖4 電機驅動電路及電流監測模塊Fig.4 The circuit of motor drive and current monitoring module
3.2 串口通信模塊
為了更精準地采集絞龍電機的電流及轉速情況,本設計設置了每100ms采集一次數據。由于設置采集間隔時間較短, 無法通過肉眼在液晶顯示屏上進行讀取,所以需要通過串口通信進行上傳和存儲數據[11]。串口與電腦USB通過虛擬串口芯片CH340通信,在串口模式下,CH340 提供常用的MODEM聯絡信號,用于為計算機擴展異步串口,或者將普通的串口設備直接升級到USB 總線。本文同時也設計無線通信通過MCU的RXD和TXD進行無線透傳,主要電路如圖5所示。
3.3 人機交互模塊
為了更好地顯示和設置螺旋升運器的轉速和電流狀態,設計了人機交互模塊(見圖6)來設置螺旋升運直流電機PWM百分比。按鍵IO設置為低電平觸發,IO模式為上拉輸入模式;OK按鍵設置為中斷觸發模式,只有按下OK按鍵時,進入設置模式,循環掃描其他按鍵輸入,進入人機設置界面。其中,KEY_0和KEY_1是OLED顯示屏上左右掃描按鍵,KEY_2和KEY_4是上下加減按鍵,KEY_5是設置OK按鍵,KEY_3是設置Cancel按鍵[12]。

圖5 串口通信模塊Fig.5 The serial communication module

圖6 人機交互模塊Fig.6 The human computer interaction module
4 整體設計工作流程
本設計工作流程圖如圖7所示。上位機由PC端的串口助手和無線接收裝置組成,連接通信設備;設置串口波特率為115 200bps后,打開串口,上位機設置完成等待接收數據。下位機的產量采集器設置螺旋升運電機PWM百分比,以達到預設轉速。在升運器腔體中谷物質量發生改變而引起的轉速變化時,系統能夠進行閉環調節。當上位機和下位機都設置成功后,系統正常運轉并對升運電機的電流、轉速進行采集,通過無線模塊上傳到PC端進行計算,在下位機的OLED顯示屏和上位機的屏幕上顯示實時產量,在測量結束后顯示收獲總產量。

圖7 系統工作流程圖Fig.7 Working flow chart of the system
5 試驗與結論
5.1 谷物流量傳感器裝置
對于本研究涉及的谷物流量傳感器,需要通過試驗的驗證和理論的分析共同完成,因此設計了一種基于螺旋升運原理的谷物流量傳感器室內試驗臺,結構如圖8所示。該試驗臺主要由谷物螺旋升運器(絞龍)、螺旋輸送腔體、底座、入糧口、出糧口、直流電機和編碼器等組成。
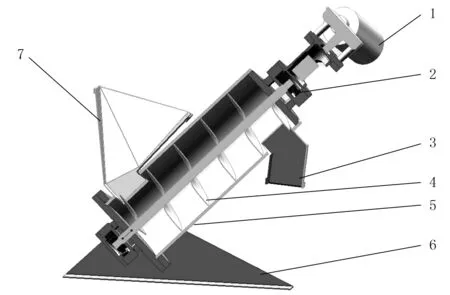
1.螺旋升運電機 2.螺旋輸送絞龍 3.出糧口 4.螺旋葉片 5.螺旋輸送腔體 6.底座 7.入糧口圖8 實驗臺整體結構圖Fig.8 The overall structure of the experimental platform
試驗臺以電機帶動螺旋升運器為谷物提升提供動力。驅動電機選用12V直流電機,額定轉速為130r/min,功率為80W。螺旋升運器提升長度為500mm,螺距為100mm,螺旋葉片直徑為100mm,鉆桿直徑22mm,底座升運角可調范圍為45°~90°。
5.2 谷物流量傳感器的靜態試驗
為了驗證該谷物產量傳感器的應用性,本文以玉米顆粒為研究對象進行了試驗。根據試驗需要,提前準備0~2kg的玉米進行試驗標定。每份玉米在進行實驗時,做5組并分別采集各組樣品數據,取其平均值通過串口上傳至上位機進行保存。谷物產量傳感器靜態擬合關系如圖9所示。
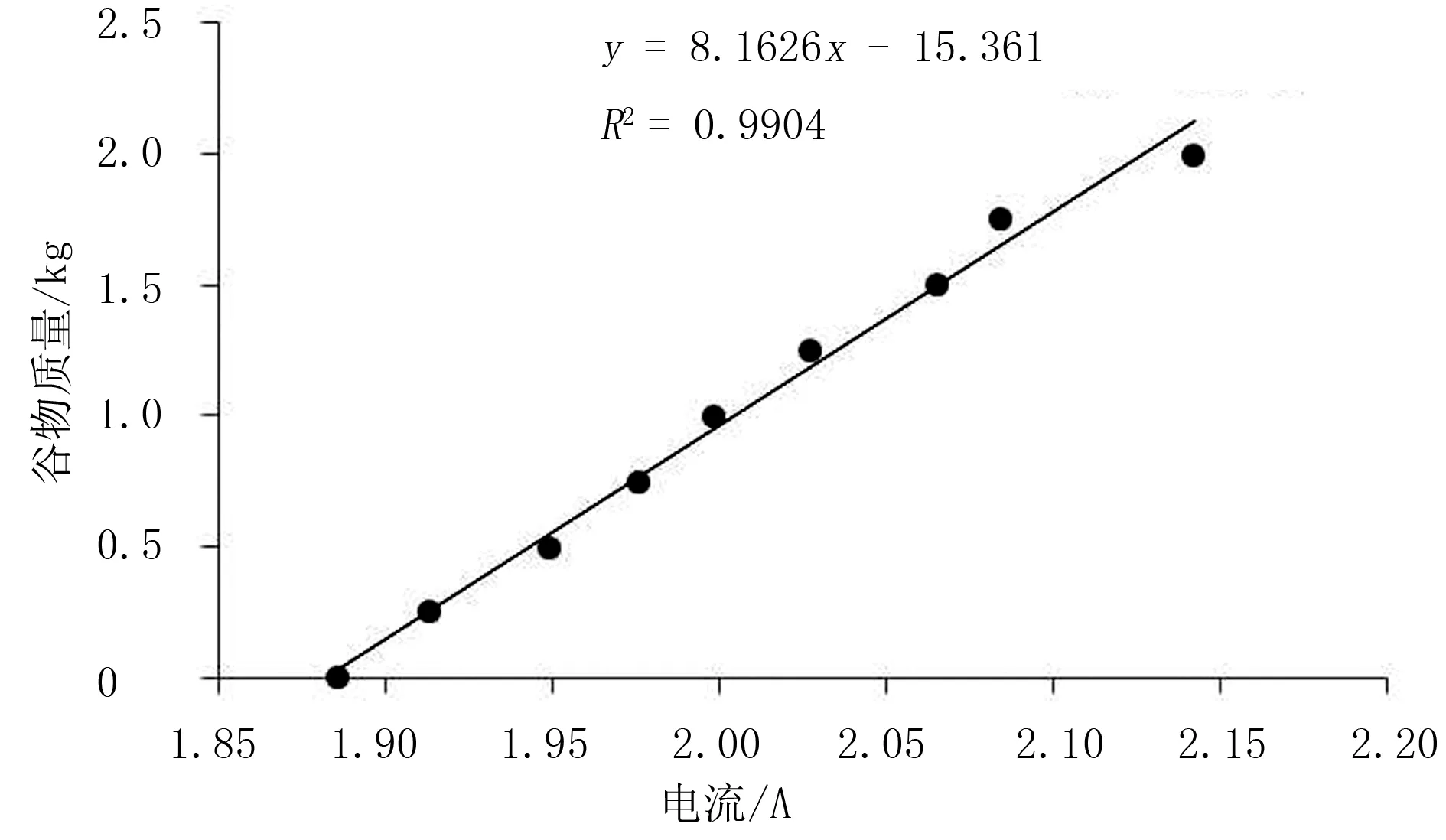
圖9 谷物產量傳感器靜態擬合關系圖Fig.9 The static fitting relation diagram of grain yield sensor
5.3 室內試驗
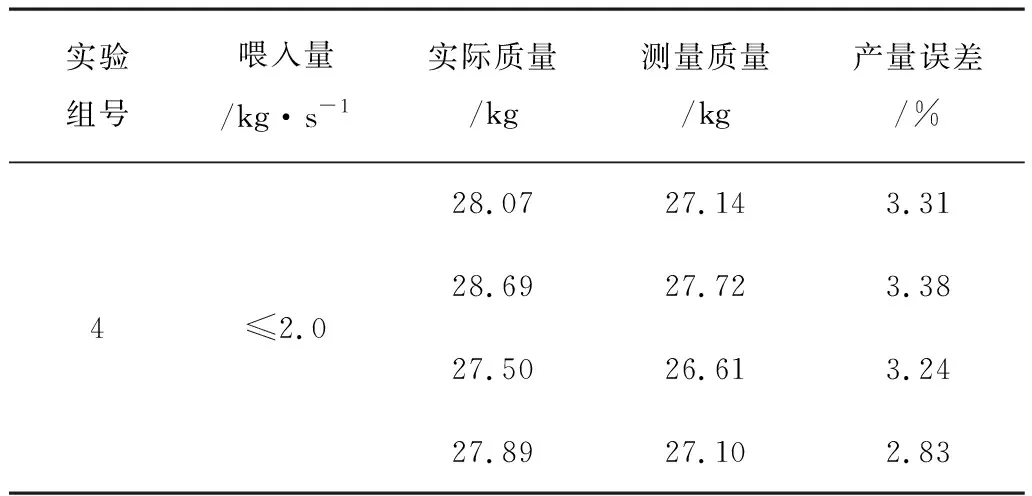
將事先準備好的一定質量的谷物倒進入糧口,接通電源,運轉試驗臺和谷物產量采集系統,完成一次谷物填充,減少填充時間誤差 。把喂入量設定為≤0.5、≤1.0、≤1.5和≤2.0kg/s進行試驗,如此進行4組并采集數據進行分析[13-14],結果如表1所示。

表1 谷物測產實驗臺試驗數據
續表1
由于谷物在經過螺旋升運器之后,在腔體中仍有殘余,導致測量質量比實際質量普遍偏小。室內試驗數據表明,該谷物產量試驗臺誤差≤3.56%,屬可接受范圍。
6 結論
1)對螺旋升運器在靜止和穩定輸送過程中的谷物進行了動力學分析,提出了一種通過檢測螺旋升運輸送電機參數估算谷物產量的方法。
2)對動力學分析后的谷物螺旋升運器量身設計了一套谷物產量監測系統,分為下位機和上位機監測部分,對螺旋升運器在輸送谷物過程中的各個參數進行了采集、上傳和存儲。
3)通過試驗對本谷物產量傳感器參數進行了標定,之后利用多組試驗驗證了該傳感器的可行性,在喂入量為0~2kg/s時,平均誤差3.11%,達到了測產要求。
參考文獻:
[1] 羅錫文,廖娟,胡煉,等.提高農業機械化水平促進農業可持續發展[J].農業工程學報,2016,32(1) :1-11.
[2] 周俊,苗玉彬,張鳳傳.平行梁沖量式谷物質量流量傳感器田間實驗[J].農業機械學報,2006,37(6): 102-105.
[3] 胡均萬,羅錫文,阮歡.雙板差分沖量式谷物流量傳感器設計[J].農業機械學報, 2009,40(4): 69-72.
[4] 陳樹人,李耀明,張西良.谷物聯合收割機測產系統研究現狀與展望[J].農業機械, 2008(8): 62-63.
[5] 馬朝興,李耀明,徐立章.聯合收割機谷物流量傳感器的現狀與分折[J].農機化研究,2008,30(7):74-76.
[6] 付興蘭,張兆國,安曉飛.光電漫反射式聯合收割機谷物產量計量系統研發與性能試驗[J].農業工程學報,2017,33(3):24-30.
[7] 張小超,胡小安,張愛國.基于稱重法的聯合收獲機測產方法[J].農業工程學報,2010,26(3):125-129.
[8] P R M B,R H.A review of combine sensors for precision farming[J]. Precision Agriculture,2002,3(2):385-392.
[9] 林愉,張曉東,雷萍.圓管漿體螺旋流中顆粒的運動分析和仿真[J]. 礦山機械, 2012,40(12): 50-53.
[10] 趙滿全.物料顆粒在立式螺旋輸送機中的運動分析[J].內蒙古農牧學院學報,1992,13(3): 77-84.
[11] 丁應生,佘開海.螺旋面斜向扭轉振動的傳動和物料運動分析[J].武漢工業學院學報, 2001,20(3): 55-57.
[12] A A M,C T S.Verification of yield monitor performance for on-the-go measurement of yield with an in-board electronic scale[J].Journal of Electronic Packaging, 2000,4(43): 801-807.
[13] 仇華錚,陳樹人,張林林.谷物產量智能測產監測器的設計與試驗[J],農機化研究,2013,35(2):130-133.
[14] 李新成.谷物聯合收割機遠程測產系統開發及降噪試驗[J].農業工程學報, 2014,30(2): 1-8.
猜你喜歡
礦山安全信息(2022年40期)2022-04-07 02:16:52
當代水產(2021年10期)2021-12-05 16:31:48
今日農業(2021年14期)2021-11-25 23:57:29
今日農業(2021年13期)2021-08-14 01:37:56
石油與天然氣地質(2021年1期)2021-02-22 14:14:44
今日農業(2020年20期)2020-11-26 06:09:10
中國果業信息(2019年10期)2019-11-13 01:21:34
中國化肥信息(2019年2期)2019-01-18 15:24:35
中國化肥信息(2019年1期)2019-01-17 21:31:12
中國化肥信息(2019年4期)2019-01-17 18:47:06
