聲納主動工況下攔截彈作戰模型與能力研究
2018-06-13 08:20:30李文哲
火力與指揮控制 2018年5期
任 磊,賈 躍,李文哲
(海軍大連艦艇學院,遼寧 大連 116018)
0 引言
懸浮式攔截彈是水面艦艇防御來襲魚雷的一型硬殺傷武器。由于硬殺傷相比軟對抗作用范圍有限,所以為了提高其作戰能力,需進一步提高對目標魚雷的定位精度[1]。這就需要依靠專用的魚雷報警聲納對來襲魚雷進行檢測和定位。魚雷報警聲納具有主、被動兩種工況,其中被動工況下懸浮式攔截彈的作戰模型已有較為深入的研究[2-3],但對于聲納主動工況下其作戰模型的研究在國內公開發表的文獻中還未見到。相比之下,魚雷報警聲納在主動工況時的探測距離較近,但其能夠測量目標魚雷的方位和距離,這就為火控設備解算目標魚雷的航向航速提供了條件。但是,魚雷報警聲納主動工況所具備的特點也給懸浮式攔截彈的布陣帶來了3個方面的問題:一是武器布放時機的確定問題。這里的武器布放時機主要考慮目標航向航速的解算時間,其中也包括了探測獲取解算需要的目標位置點的時間。解算時間越長,解算精度越高;但是由于魚雷報警聲納主動工況的探測距離較近,如果解算時間過長,目標與艦艇距離將更近,這就可能導致武器受到最小射程的限制而無法布放;二是攔截提前量的確定問題。為了確保對來襲魚雷的有效攔截,懸浮式攔截彈入水時應位于魚雷航路前方且與魚雷相距足夠的距離,即保證足夠的攔截提前量[4]。但是,同樣由于武器最小射程的限制使得攔截提前量也不能過大;三是武器布放間隔的優化問題。由于能夠測量目標的距離,對目標的定位精度較高。這種情況下布放一定數量的懸浮式攔截彈已能覆蓋來襲魚雷的可能航向范圍,這就需要確定適當的布放間隔,盡量避免由于落點誤差使來襲魚雷從相鄰武器的間隙中突破。因此,武器的布放間隔需要進行優化。然而,布放時機、攔截提前量和布放間隔三者之間又存在相互聯系,一般的解析方法難以解決以上問題。因此,這里通過建模和仿真,對魚雷報警聲納主動工況下懸浮式攔截彈的作戰能力問題展開研究。
1 武器作戰模型
1.1 作戰過程概述

圖1 作戰過程示意圖
由于魚雷報警聲納一般先由被動工況在較遠距離檢測到目標,然后再在其主動工況下對目標實施精確定位[5]。所以認為聲納可在主動工況的最遠作用范圍探測到目標,此時來襲魚雷一般還未發現水面艦艇,仍處于直航搜索階段。
如圖1所示,假設水面艦艇于W0點通過魚雷報警聲納主動工況發現目標魚雷位于T0點,目標方位和距離分別為B0、D0。聲納按照一定的時間周期將目標的觀測位置送給火控設備,火控設備通過濾波開始解算目標的航向CT和航速VT。當解算時間到達一定值t解算時,火控設備根據目標的航向航速解算得到武器的射擊諸元,此時目標魚雷航行至T1點,艦艇航行至W1點并發射懸浮式攔截彈。假設武器的最大射程為Smax,最小射程為Smin,發射數量為N。經過飛行時間tf后入水,其入水位置以目標魚雷航向線上的P點為中心,按照一定方向和間隔對稱分布。此時目標魚雷航行至T2點。當懸浮式攔截彈檢測到魚雷經過時迅速引爆并毀傷魚雷。這里將P點叫做武器的布放基準點。P點與武器入水時刻目標位置點T2之間的距離即“攔截提前量”,用Dtq表示。
1.2 目標運動參數解算模型
目標運動參數通常可采用最小二乘法濾波進行計算,具體步驟如下:1.2.1 計算中間變量a、b
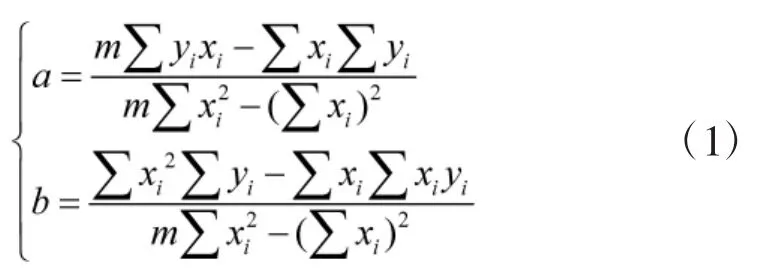
其中,xi,yi為魚雷報警聲納主動工況探測到的目標位置點的橫、縱坐標。
1.2.2 計算目標航向
根據目標觀測位置的縱坐標隨時間增大或減小,判斷目標航向按照式(2)或式(3)解算。

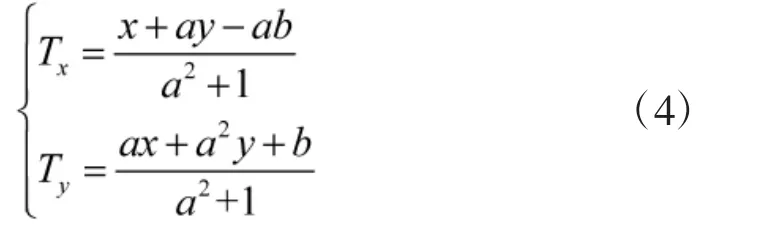
1.2.3 計算中間變量Tx、Ty
1.2.4 計算目標航速
將解算時間內魚雷報警聲納探測的第一個和最后一個目標位置點的橫、縱坐標分別x、y作為代入到式(4),分別得到 Tx',Ty'和 Tx',Ty'',則目標的航速可由式(5)得到[6]。
1.3 布陣參數解算模型
1.3.1 布放基準點
如圖2所示,以武器發射時刻的艦艇位置W1為坐標原點,以艦艇航向CW為X軸正向建立直角坐標系。根據作戰過程所述,魚雷位于T1,其方位和距離分別為B1和D1,目標舷角為Qm1,射擊提前角為φ。經過飛行時間tf后,魚雷以航向CT、航速VT航行至T2,武器則以P點為基準布放入水。在△W1PT1中,可建立如式(6)所示的方程組。

其中,tf=f(DP)是根據武器射表擬合的飛行時間與射程之間的關系。由于式(6)是隱式方程組,需用迭代方法求解[7]。
計算出基準點P的距離DP和射擊提前角φ后即可根據式(7)確定基準點P。

1.3.2 布放間隔
武器布放間隔Djg由其毀傷半徑d毀傷,魚雷航向CT,基準點P的方位BP及間隔系數k決定,如式(8)所示。

1.3.3 布放位置
確定基準點P和布放間隔Djg后,各枚武器以點P為中心,沿著P點方位BP的法線方向布放,具體位置可由式(9)計算得到。

其中,i=1,2,…,N。
2 作戰能力仿真與分析
2.1 作戰仿真模型
2.1.1 魚雷運動觀測模型
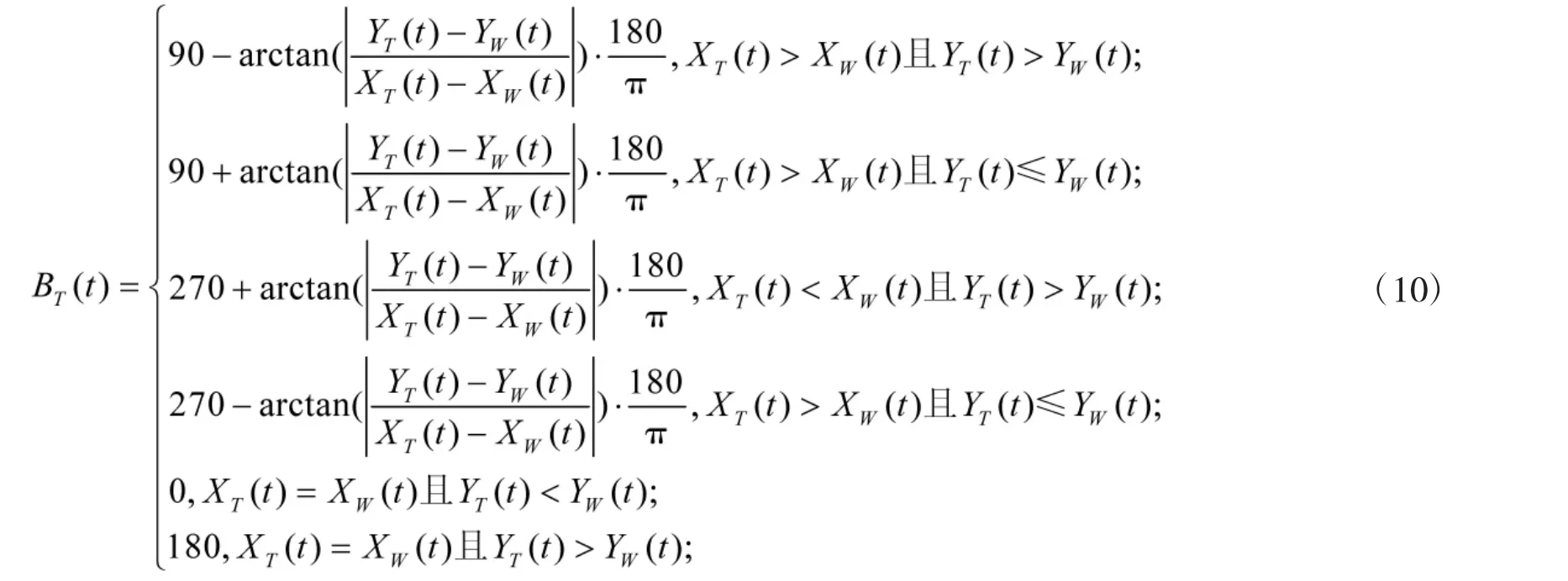
由于不考慮艦艇規避機動且魚雷處于直航搜索階段,兩者均作勻速直線運動,故任意時刻t魚雷相對艦艇的真實方位和距離可按式(10)[8]和式(11)計算。

假設魚雷報警聲納主動工況探測和處理各個目標位置點的周期為t送數,則艦艇觀測的魚雷位置點的坐標由式(12)計算。
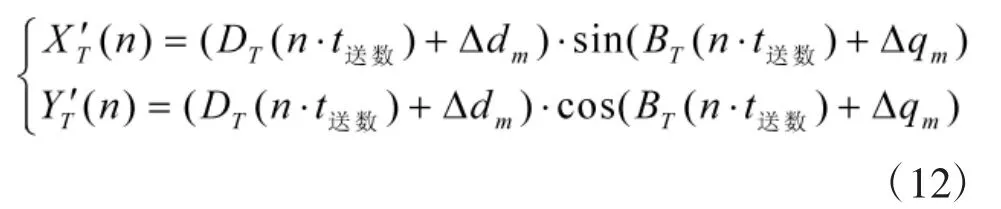
其中,n為聲納探測的目標位置點數;△qm和△dm分別為測向和測距的偏差量。
2.1.2 武器布放位置仿真模型
各枚武器的實際入水點的方位和落點距離由式(13)計算。

式中,△dHP(i)、dZP(i)分別為武器橫向和縱向的散布誤差。武器的布放位置由式(14)計算。

2.1.3 魚雷攔截成功判斷模型
任意t時刻各枚武器與魚雷的距離由式(15)計算[9]。

當存在di(t)<d毀傷即可判斷攔截成功。
2.1.4 攔截概率計算模型
仿真次數為5000次,假設其中攔截成功的次數為n成功,則攔截概率p攔截由式(16)計算得到。

2.2 仿真條件
魚雷報警聲納對目標方位、距離的測量誤差均方差分別為σB,σD。火控設備對目標方位、距離的解算誤差均方差分別為 σB',σD'。
艦艇航速為20kn。目標魚雷類型為線導+聲自導魚雷,初始距離為3000 m,航速為50kn。武器落點縱、橫向誤差均方差 σZ、σH均為其射程的 1/130[10-11]。
2.3 仿真結果及分析
2.3.1 目標位置解算誤差
表1~表3分別為不同目標初始舷角Qm0和不同解算時間的目標位置解算精度。

表1 解算時間為10 s時的目標位置解算精度

表2 解算時間為25 s時的目標位置解算精度

表3 解算時間為40 s時的目標位置解算精度
2.3.2 目標運動參數解算精度
表4為不同解算時間的目標航向航速解算精度。

表4 目標運動參數解算精度
2.3.2 攔截概率計算
由表1和表4可知,解算時間為10 s時的目標位置和運動參數解算誤差很大,所以這里只考慮解算時間為25 s、40 s的情況,并將目標初始距離的聲納測距誤差和武器落點誤差的綜合誤差σ的不同倍數作為攔截提前量的取值。
1)解算時間為25 s時的攔截概率

圖3 解算時間為25 s時的攔截概率
2)解算時間為40 s時的攔截概率

圖4 解算時間為40 s的攔截概率
2.3.3 仿真結果分析
從圖3、圖4可以看到:
1)目標運動參數解算時間從25 s增加到40 s,其攔截概率增加了15%~20%。
2)攔截提前量從1σ增加到3σ,解算時間為25 s時其攔截概率增加了18%~20%;解算時間為40 s,其攔截概率增加幅度較小,在目標初始舷角小于50°時,其攔截概率還有所減小。
3)間隔系數從0.2增加到1.0,其攔截概率先增大后減小。當解算時間為25 s時,若目標初始舷角小于150°,間隔系數最優取0.6,否則取0.8;當解算時間為40 s時,若目標初始舷角小于150°,間隔系數最優取0.4,否則取0.6。
綜上所述,若聲納能夠在3000 m左右的距離檢測并跟蹤目標魚雷,則目標運動參數解算時間為40 s最佳。此時,針對舷角大于50°的目標,攔截提前量取3σ,布放間隔系數取0.4;否則攔截提前量取為2σ,布放間隔系數取0.6。
3 結論
魚雷報警聲納主動工況下懸浮式攔截彈的作戰模型及能力仿真研究建立了目標運動參數和武器射擊參數的解算模型,并采用蒙特卡洛法仿真計算了其作戰能力。結果表明以上模型正確可行,解決了布陣參數的確定問題,為指揮決策提供了理論依據。由于仿真中包括艦艇航速在內的其他因素對仿真結果亦存在影響,但主要考慮了布陣參數和目標初始舷角,所得結論亦未對所有情況進行全面驗證,這是下一步要研究的方向。
[1]張寶華,杜選民.水面艦艇魚雷防御系統綜述[J].船舶工程,2003,25(4):17-19.
[2]姚奉亮,賈躍,丁貝.懸浮式深彈攔截不確定型魚雷作戰模型研究[J].魚雷技術,2011,19(1):63-67.
[3]胡偉文,趙峰,姜禮平,等.懸浮式深彈攔截魚雷作戰仿真及效能分析[J].海軍工程大學學報,2013,25(4):6-10.
[4]徐梁,謝國新,趙志軍.懸浮式深彈攔截魚雷方法研究[J].水雷戰與艦船防護,2010,18(4):46-49.
[5]肖昌美,李恒,彭佩.國外水面艦艇魚雷防御系統發展現狀及趨勢[J].魚雷技術,2014,22(2):150-156.
[6]李啟華,吉海鵬.最小二乘法在測定目標運動要素中的應用研究[J]. 廣州航海高等專科學校學報,2008,16(1):5-7.
[7]楊福渠.火箭深彈射擊效率[M].北京:國防工業出版社,1992.
[8]賈躍,姚奉亮,丁貝.火箭助飛式聲干擾器和懸浮式深彈協同對抗線導魚雷建模與仿真[J].魚雷技術,2011,19(14):307-311.
[9]林賢杰,賈躍,趙學濤.艦艇使用懸浮式深彈對抗聲自導魚雷規避策略分析[J].魚雷技術,2008,16(4):51-53.
[10]姚奉亮,賈躍,丁貝.懸浮式深彈攔截線導+聲自導魚雷作戰模型研究 [J]. 指揮控制與仿真,2010,32(5):24-27.
[11]任磊,賈躍,李文哲.飛航式助飛魚雷指令修正時機仿真[J].火力與指揮控制,2016,41(6):28-32.
