基于多步新息的機(jī)動檢測方法
2018-06-13 08:20:34王勇
火力與指揮控制 2018年5期
王 勇
(江蘇自動化研究所,江蘇 連云港 222061)
0 引言
機(jī)動目標(biāo)跟蹤主要包括觀測數(shù)據(jù)預(yù)處理、機(jī)動目標(biāo)模型、機(jī)動檢測與機(jī)動辨識、濾波與預(yù)測以及跟蹤坐標(biāo)系和濾波狀態(tài)變量(即目標(biāo)空間位置定位與描述)的選取等。其困難主要來源于兩個方面:一是目標(biāo)運動的不確定,二是觀測數(shù)據(jù)的噪聲。要解決此困難,一個重要的環(huán)節(jié)就是機(jī)動檢測[1-3]。
機(jī)動檢測的主要思想是根據(jù)觀測量Y(k)與狀態(tài)預(yù)測量()構(gòu)成的新息向量 d(k)=Y(k)-的變化情況,按照某一準(zhǔn)則或者邏輯進(jìn)行機(jī)動檢驗。基于機(jī)動檢測結(jié)果,自適應(yīng)調(diào)整系統(tǒng)狀態(tài)噪聲陣或濾波增益,對機(jī)動目標(biāo)的運動狀態(tài)進(jìn)行濾波估計和預(yù)測,從而實現(xiàn)對機(jī)動目標(biāo)的跟蹤功能。因此,可靠及時地檢測出目標(biāo)機(jī)動模式直接影響機(jī)動目標(biāo)跟蹤的性能。
進(jìn)入21世紀(jì)后,由于電子技術(shù)的快速發(fā)展,反艦導(dǎo)彈性能有了大幅度提高。末端防御系統(tǒng)為了提高對反艦導(dǎo)彈的處理能力,一種方法是提高火控系統(tǒng)數(shù)據(jù)率,以充分使用跟蹤器的目標(biāo)量測數(shù)據(jù),提高對超音速反艦導(dǎo)彈的解算處理能力。針對系統(tǒng)數(shù)據(jù)率提高,傳統(tǒng)的基于新息的機(jī)動檢測方法[4-7]不再適用。為此,本文提出了一種基于多步新息的機(jī)動檢測方法,可較好地提取出目標(biāo)機(jī)動信息,便于機(jī)動檢測,并通過仿真計算,對于給定虛警率,針對基于衰減記憶的機(jī)動檢測方法,給出最小機(jī)動檢測延遲與衰減系數(shù)的關(guān)系。
1 多步新息計算方法
目標(biāo)動態(tài)模型用來描述目標(biāo)狀態(tài)X關(guān)于時間的變化情況。常用的是狀態(tài)空間線性模型(連續(xù)時間模型)為:

或離散時間模型為:

以離散狀態(tài)方程為例,X(k)、Y(k)和 U(k)分別是目標(biāo)狀態(tài)、觀測和控制輸入在k時刻的向量;Φ(k+1,k)和H(k)分別是適當(dāng)維的系統(tǒng)狀態(tài)轉(zhuǎn)移矩陣和觀測矩陣;W(k)和V(k)分別是系統(tǒng)模型噪聲和觀測噪聲,且噪聲W(k)和V(k)為互不相關(guān)的高斯白噪聲序列,其統(tǒng)計特性為:

其中,Q、R分別為系統(tǒng)噪聲和觀測噪聲協(xié)方差矩陣[8-9]。
新息為觀測量與預(yù)測之間的差值,其公式表示為:

文獻(xiàn)[4]證明了以卡爾曼濾波與預(yù)測為載體的線性最優(yōu)濾波新息序列具有零均值高斯白噪聲特性。
多步新息是指利用觀測量Y(k)與狀態(tài)變量的T步預(yù)測量計算的差值{dT(k)}:

這里,T為系統(tǒng)運行周期的整數(shù)倍。如果目標(biāo)沒有作機(jī)動,對非機(jī)動目標(biāo)模型來說,dT(k)同樣具有零均值高斯白噪聲特性,本文所描述的機(jī)動檢測方法也是基于該特性。
2 機(jī)動檢測方法
檢測目標(biāo)是否機(jī)動是一個決策問題,可以公式化為假設(shè)檢驗問題:
H0:目標(biāo)非機(jī)動;H1:目標(biāo)機(jī)動
根據(jù)觀測殘差和控制輸入的特性,在機(jī)動目標(biāo)跟蹤中,很多機(jī)動檢測使用χ2檢驗或準(zhǔn)χ2檢驗,即在H0(檢測機(jī)動開始)條件下,檢測估計的統(tǒng)計量是否服從χ2分布。假設(shè)在H0條件下ε服從自由度為n 的 χ2分布(ε~χn2),且下式成立,則表明目標(biāo)開始機(jī)動。

這里1-α是置信度。
歸一化殘差平方為。
為減少虛警和漏警的概率發(fā)生,這里采用衰減記憶統(tǒng)計量方法進(jìn)行假設(shè)檢驗,記衰減記憶和為εkρ。

其中,ρ為衰減系數(shù),sρ為衰減記憶和的等效窗口長度。因為 εk服從自由度為 n 的 χ2分布(即(εk~χn2,n=dim(d))。作為高斯變量的加權(quán)和 εkρ并不服從 χ2分布,但通過權(quán)匹配可將它近似看作χ2變量,即近似認(rèn)為[10]

實際應(yīng)用中,在球坐標(biāo)系下跟蹤時n=3。至此,可根據(jù)式(7)來檢測機(jī)動起始,其中 ε=εkρ。
3 機(jī)動檢測延遲時間
通常對假設(shè)檢驗問題希望獲取盡可能多的測量值來提高檢測概率。但對機(jī)動檢測問題來說,希望盡可能快地獲得判定,即獲得判定的延遲最小。這樣就面對兩種互為矛盾的目標(biāo),即為增加檢測概率而試圖延遲判定,與此同時試圖減小延遲來避免跟蹤滯后。所以,在固定虛警率下能夠準(zhǔn)確地獲取機(jī)動檢測延遲時間是至關(guān)重要的。
根據(jù)式(7),可以看出εkρ的計算值與機(jī)動幅度(新息值)和窗口長度(sρ)有關(guān),即基于 χ2檢驗的機(jī)動檢測延遲時間是系統(tǒng)機(jī)動模型、機(jī)動幅度、門限值(α)和窗口長度(等價于衰減系數(shù)ρ的大小)的函數(shù)。基于多步新息的機(jī)動檢測延遲時間則是系統(tǒng)機(jī)動模型、機(jī)動幅度(與步長也有關(guān)系)、置信度和窗口長度的函數(shù)。
置信度是根據(jù)系統(tǒng)要求給定的,如果選取α值較小,即置信度較高,即判定目標(biāo)機(jī)動的門限值較高,因此,檢測機(jī)動的延遲就大。所以,α值與機(jī)動檢測延遲成反比關(guān)系。機(jī)動幅度也影響檢測延遲,大機(jī)動使得新息序列的值較大,于是統(tǒng)計值εkρ有較大的數(shù)值。對于固定的檢測門限,能更早地檢測到機(jī)動。實際應(yīng)用中,由于目標(biāo)是未知的,從而機(jī)動幅度也是事先未知的,不能用于系統(tǒng)優(yōu)化。當(dāng)窗口長度 sρ較大時,εkρ/sρ的隨機(jī)性很弱,檢測滯后較大;同時若多步新息的步長較大,同樣會帶來檢測滯后,所以多步新息的步長選擇,以及窗口長度(衰減系數(shù))的選擇能優(yōu)化系統(tǒng)。
4 仿真分析
考慮到最優(yōu)問題的復(fù)雜性,這里采用仿真計算的方法,以指導(dǎo)步長和衰減系數(shù)的選擇。
目標(biāo)仿真航路是從勻速直線過渡到以某個固定過載做勻加速運動,共仿真5條目標(biāo)航路,目標(biāo)過載能力從1.0 g到5.0 g。對每條航路選擇衰減系數(shù)從0.1到0.8不等。不同過載條件下,最小檢測延遲時間與衰減系數(shù)的關(guān)系如圖1所示。可以看出衰減系數(shù)越小,最小檢測延遲時間越長,這也與理論分析是一致的。
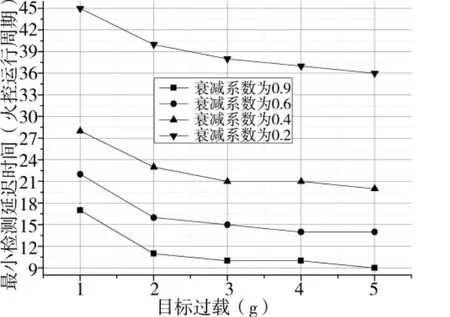
圖1 最小檢測延遲時間與衰減系數(shù)的關(guān)系
對以上每個航路在固定衰減系數(shù)時,將多步新息的步長從10設(shè)置到60(火控運行周期的倍數(shù))不等,并進(jìn)行仿真計算。仿真結(jié)果表明:對于有顯著機(jī)動的目標(biāo)航路(如本文設(shè)計的那樣),不同步長下的機(jī)動檢測延遲時間沒有變化,如表1所示;但可以顯著降低目標(biāo)機(jī)動檢測的虛警率,如圖2所示。
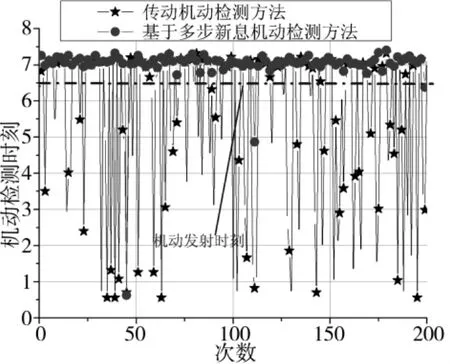
圖2 基于多步新息檢測方法與傳統(tǒng)機(jī)動檢測方法對比
在衰減系數(shù)為0.2時,不同航路、不同步長下的最小機(jī)動檢測延遲時間如表1所示。
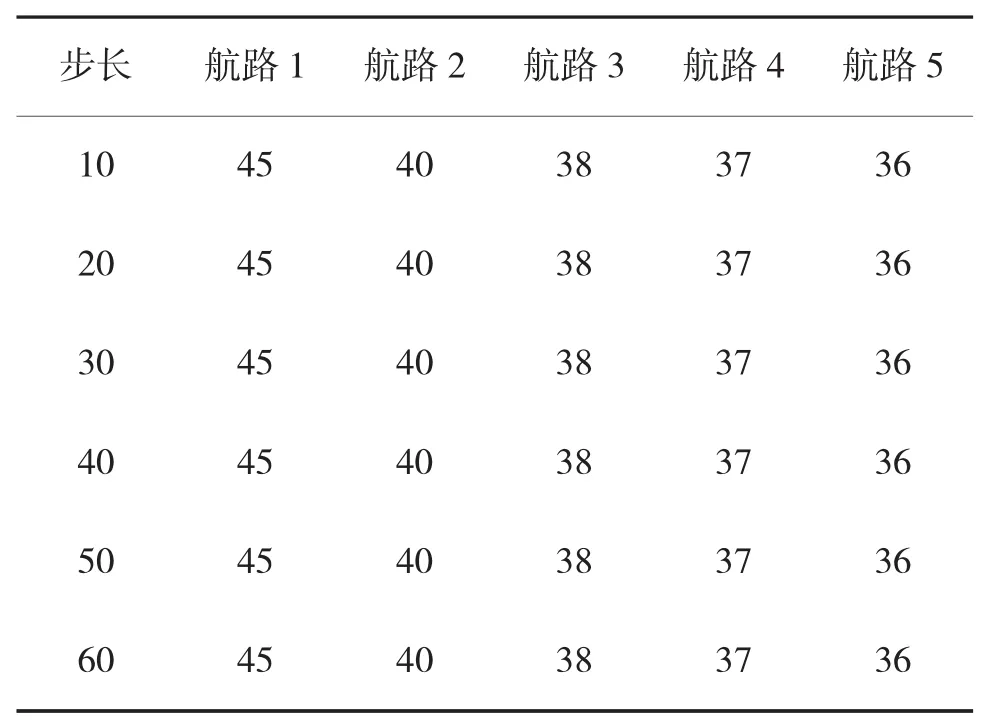
表1 固定衰減系數(shù)下,不同航路、不同步長下的最小機(jī)動檢測延遲時間(火控運行時間)
針對弱機(jī)動航路,同樣是從勻速直線過渡到以某個固定過載做勻加速運動,但目標(biāo)過載只有0.2 g。在固定衰減系數(shù)條件下,最小檢測延遲時間與步長的關(guān)系如圖3所示。可以看出對于固定衰減系數(shù),存在最優(yōu)的預(yù)測步長。
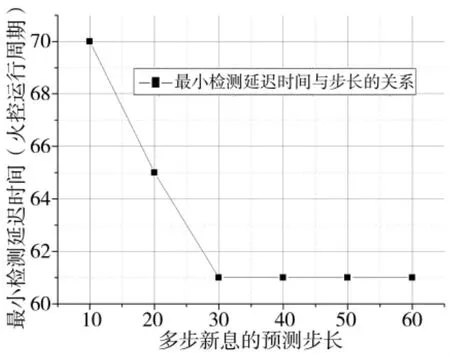
圖3 最小檢測延遲時間與多步新息預(yù)測步長的關(guān)系
5 結(jié)論
反艦導(dǎo)彈一個重要的發(fā)展方向是速度越來越快,留給末端防御系統(tǒng)的反應(yīng)時間越來越短。為提高對反艦導(dǎo)彈的處理能力,一個有效的方法是提高防御系統(tǒng)對跟蹤數(shù)據(jù)的使用率,即提高末端防御系統(tǒng)的數(shù)據(jù)率。但數(shù)據(jù)率的提高會降低傳統(tǒng)基于單步新息機(jī)動檢測窗口的信噪比。基于此,本文提出了基于多步新息的機(jī)動檢測方法,并采用基于衰減記憶的機(jī)動檢測方法。針對給定的機(jī)動檢測門限,通過分析和仿真表明:基于多步新息機(jī)動檢測方法可以顯著降低虛警率。針對仿真航路,同時給出了最小檢測延遲時間與衰減系數(shù),以及與預(yù)測步長的關(guān)系。
[1]徐國亮.機(jī)動目標(biāo)跟蹤算法[J].情報指揮控制系統(tǒng)與仿真技術(shù),2002,30(8):42-56.
[2]石章松,謝君.機(jī)動檢測算法特性分析仿真研究[J].計算機(jī)仿真,2007,24(9):90-94.
[3]高超,鄧曉波.高速機(jī)動目標(biāo)檢測算法研究[J].計算機(jī)仿真,2014,31(12):1-5.
[4]姚洪利,高效,田科鈺.基于衰減記憶n次新息的目標(biāo)機(jī)動檢測和排飛點[J].情報指揮控制系統(tǒng)與仿真技術(shù),2004,26(5):25-29.
[5]宋驪平,姬紅兵,高新波.基于高階累積量的目標(biāo)機(jī)動檢測新方法[J].電子學(xué)報,2004,32(1):154-156.
[6]李海,吳仁彪,王小寒.基于非線性最小二乘的空中機(jī)動目標(biāo)檢測方法 [J].電子與信息學(xué)報,2012,34(9):2143-2147.
[7]尚海燕,張雅斌,蘇洪濤,等.長觀測時間內(nèi)機(jī)動目標(biāo)檢測方法 [J].系統(tǒng)工程與電子技術(shù) ,2006,28(12):1779-1782.
[8]張蕊,史麗楠.基于擴(kuò)展卡爾曼濾波的機(jī)動目標(biāo)跟蹤研究[J].航天控制,2012,30(3):12-17.
[9]岳帥,孔令講,楊建宇,等.卡爾曼動態(tài)規(guī)劃機(jī)動目標(biāo)檢測前跟蹤方法[J].現(xiàn)代雷達(dá),2011,33(6):58-63.
[10]徐國亮,鄧雅娟.機(jī)動目標(biāo)建模及機(jī)動檢測算法[J].情報指揮控制系統(tǒng)與仿真技術(shù),2005,27(4):81-83.
猜你喜歡
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
兒童故事畫報(2019年5期)2019-05-26 14:26:14
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
