基于模糊神經(jīng)網(wǎng)絡的儲運發(fā)箱吊裝PID控制
2018-06-13 08:20:38曾令夢侯遠龍蔣夢琴
火力與指揮控制 2018年5期
關鍵詞:系統(tǒng)
曾令夢,高 強,侯遠龍,蔣夢琴,黃 京
(南京理工大學機械工程學院,南京 210094)
0 引言
當前,火箭炮普遍情況下使用箱式發(fā)射,能有效提高發(fā)射的火力密度。而儲運發(fā)箱的吊裝作業(yè)主要通過人力完成,存在效率較低、人員的工作環(huán)境差的現(xiàn)象[1]。采用儲運發(fā)箱的自動吊裝技術,可減少移動儲運發(fā)箱的時間,提高定位的精度。同時,儲運發(fā)箱的自動吊裝技術可以減短發(fā)射的預備周期,提高火箭炮的應急能力。但該自動吊裝系統(tǒng)具有非線性,且吊裝過程中容易受到擾動,傳統(tǒng)PID難以達到要求[2-3]。
模糊控制是以模糊邏輯推理為基礎的控制方法[4],具有較強的魯棒性,但模糊規(guī)則的調(diào)節(jié)主要依靠經(jīng)驗,不夠準確。神經(jīng)網(wǎng)絡具有較強的自學習功能,能夠逼近任何一個復雜的非線性系統(tǒng),還能學習和適應不確定系統(tǒng)的動態(tài)特性[5]。將這兩者結合用于吊裝系統(tǒng)定位的PID控制,可以發(fā)揮兩種控制的優(yōu)點,是解決該非線性系統(tǒng)的一種有效方法。
本文結合模糊控制和神經(jīng)網(wǎng)絡來實現(xiàn)自動吊裝系統(tǒng)的PID控制,使系統(tǒng)在保持經(jīng)典PID控制器優(yōu)勢的同時,也能繼承模糊神經(jīng)網(wǎng)絡的自學習和自適應能力。采用模糊神經(jīng)網(wǎng)絡整定的PID控制器,可以改善系統(tǒng)的可靠性,提高吊裝精度,縮短吊裝時間。
1 儲運發(fā)箱自動吊裝系統(tǒng)
1.1 自動吊裝的原理
1)選擇正北為參考基準線。慣導安裝在發(fā)射架上,可獲取發(fā)射架的北向角以及發(fā)射架對大地的縱、橫傾值。
2)裝填車和發(fā)射車上安裝激光測距儀,測量出發(fā)射車上的兩個已知基準點到裝填車上的兩個已知基準點的距離值,由距離值計算出裝填車與發(fā)射車的相對夾角θ,如圖1所示。
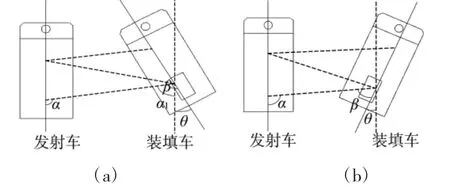
圖1 裝填車與發(fā)射車的相對夾角
3)根據(jù)裝填車與發(fā)射車的相對夾角,再結合發(fā)射架的北向角,計算出將儲運發(fā)箱調(diào)轉(zhuǎn)到發(fā)射架上方時,裝填車吊臂相對于裝填車的高低角和方向角。
4)利用控制算法將吊臂調(diào)轉(zhuǎn)至目標位置,以完成自動吊裝。
1.2 電液伺服系統(tǒng)的組成
該吊裝系統(tǒng)的結構主要由方位角伺服系統(tǒng)和高低角伺服系統(tǒng)組成,即回轉(zhuǎn)機構和變幅機構。回轉(zhuǎn)機構通過液壓馬達來控制吊臂方位角的變化。變幅機構控制吊臂高低角的變化,由吊臂架腹部的液壓缸實現(xiàn),用于改變吊臂架俯仰,實現(xiàn)高低角的控制[6]。電子伺服系統(tǒng)原理圖如圖2所示。
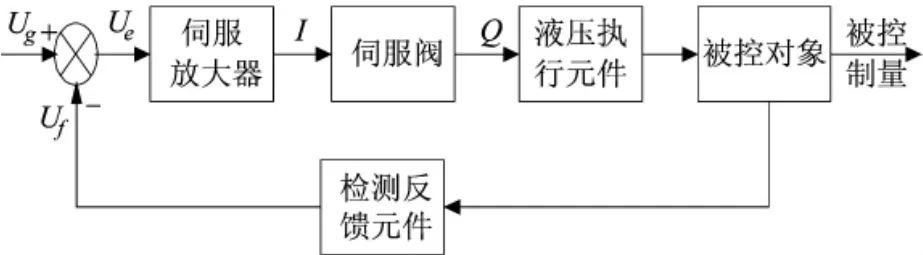
圖2 電液伺服系統(tǒng)原理圖
1.3 傳遞函數(shù)的推導
由于方位角和高低角伺服系統(tǒng)的控制原理相同,此處以高低角作為例子進行建模和仿真。
1.3.1 伺服放大器
由于其固有頻率高,可將放大器看作比例環(huán)節(jié)。

式中,I(s)為輸出電流,U(s)為誤差電壓,Ka為放大器的增益。
1.3.2 電液伺服閥
電液伺服閥作為關鍵部件,通過將電流控制信號轉(zhuǎn)換為伺服閥閥芯的運動,產(chǎn)生節(jié)流口,從而輸出流量與液壓力,控制液壓執(zhí)行元件的速度、方向以及帶負載的動力[7],從而達到連接液壓元件和電氣元件的作用。電液伺服閥的優(yōu)劣指標將直接影響系統(tǒng)的響應速率和控制精度,從而影響可靠性。
電液伺服閥的傳遞函數(shù)如下:

由于在很多的電液系統(tǒng)中,液壓缸的動態(tài)響應比伺服閥更低。為了讓系統(tǒng)分析起來更簡便,則簡化了電液伺服閥的二階傳遞函數(shù):

式中,ωsv為伺服閥的固有頻率,ξsv為阻尼比。
1.3.3 閥控液壓缸
在不忽略各種影響因素的前提下,傳遞函數(shù)為:

K為液壓缸的增益:

式中,Ap為液壓缸的橫截面積。
1.3.4 位移傳感器
位移傳感器的響應速度比電液伺服閥高很多,所以位移傳感器可以當作比例環(huán)節(jié)。

式中,Y為傳感器測量的實際位移,Xp為液壓缸的位移。
1.3.5 高低角伺服系統(tǒng)傳遞函數(shù)
控制系統(tǒng)方塊圖如圖3所示。

圖3 吊裝高低角控制的系統(tǒng)框圖
則系統(tǒng)的開環(huán)傳遞函數(shù)為:

2 基于模糊神經(jīng)網(wǎng)絡的PID控制器
2.1 模糊神經(jīng)網(wǎng)絡PID控制器結構
由模糊神經(jīng)網(wǎng)絡參數(shù)調(diào)整器和PID控制器組成。該控制器是把誤差、誤差變化率和誤差累積量作為輸入,通過參數(shù)的自學習能力來調(diào)整模糊規(guī)則,以得到能夠達到期望控制效果的PID控制器參數(shù)[8]。該控制方法精度高,不會出現(xiàn)超調(diào)量大、易振蕩的現(xiàn)象。控制器的結構框圖如圖4所示:
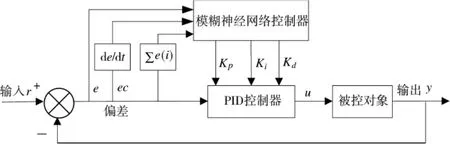
圖4 控制器結構圖
該控制系統(tǒng)主要由兩部分組成:
1)PID控制器:該控制器直接控制被控對象。
2)模糊神經(jīng)網(wǎng)絡參數(shù)調(diào)整器:利用神經(jīng)網(wǎng)絡的自學習調(diào)節(jié)網(wǎng)絡權系數(shù),從而使得輸出將會適用于某特定的控制函數(shù)中的PID控制器參數(shù)Kp、Ki、Kd。
本文采用傳統(tǒng)增量式PID控制,PID算法如下:
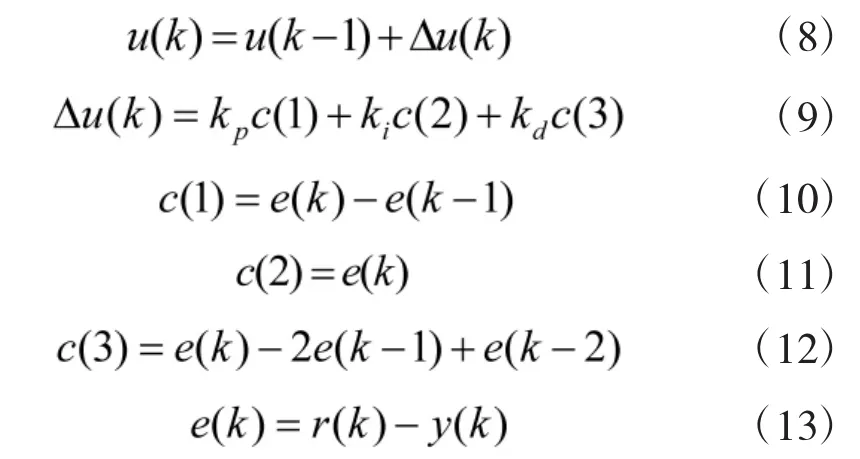
式中:u(k)為控制器的輸出,r(k)為理想輸出,y(k)為實際輸出,e(k)為兩者的偏差信號。
2.2 模糊神經(jīng)網(wǎng)絡結構
本文設計的神經(jīng)網(wǎng)絡有4層,包括輸入層、模糊層、模糊推理層和輸出層,其結構如圖5所示:

圖5 模糊神經(jīng)網(wǎng)絡結構
1)第1層為輸入層,該層中每個神經(jīng)元代表一個輸入量,并將輸入值傳遞到下一層。神經(jīng)網(wǎng)絡將系統(tǒng)誤差e、誤差變化率ec和誤差累積量作為輸入量。激活函數(shù)為:

該層的輸入為:。

2)第2層為模糊層。該層有7個神經(jīng)元,分別將3個輸入劃分到7個模糊集,進行模糊化。這7個節(jié)點分別表示模糊集中的 {NL,NM,NS,Z,PS,PM,PL}[9];分別表示負大、負中、負小、零、正小、正中、正大。根據(jù)系統(tǒng)的特點,使用高斯函數(shù)作為激活函數(shù),以此來計算模糊集中各輸入變量的隸屬度。該層的激活函數(shù)如下:

其中,i=1,2,3;j=1,2,3,4,5,6,7。mij是高斯函數(shù)中的第i個輸入量的第j個模糊集隸屬度函數(shù)的均差,σij為標準差。
3)第3層為模糊推理層。該層有7個神經(jīng)元,各節(jié)點對應一個模糊規(guī)則,作用是通過把模糊化以后的輸入量再進行兩兩相乘,可得到本層的輸出值。因此,該層的激活函數(shù)輸出為:

其中,。
4)第4層為輸出層。該層的輸出為PID控制器的3個參數(shù)Kp、Ki、Kd,與上一層連接有一個連接權矩陣ω。本層的輸出為:
2.3 學習算法
由于電液伺服系統(tǒng)具有很強的非線性,需要即時對網(wǎng)絡權系數(shù)進行整定,也就是調(diào)整模糊規(guī)則。取性能指標函數(shù)為:
其中,r(k)為理想輸出,y(k)為實際輸出。
按照梯度下降法調(diào)節(jié)神經(jīng)網(wǎng)絡權值,即按照E對權系數(shù)的負梯度方向搜索調(diào)整。同時,附加一個使搜索快速收斂的全局極小慣性項。△ωij(k)的學習算法為:

式中,η為學習速率,α為慣性系數(shù)。

由于未知,所以用近似的符號函數(shù)sign(),產(chǎn)生的誤差可通過調(diào)節(jié)學習速率來補償。
3 實驗仿真
3.1 建立仿真模型
該電液伺服系統(tǒng)的位置環(huán)通過本文設計的伺服控制器完成。在simulink中搭建仿真模型如圖6,其中,控制器和被控對象的部分寫進s函數(shù),用于描述復雜的動態(tài)系統(tǒng)[10]。

圖6 simulink仿真模型
3.2 結果分析
為了比較3種控制器的性能:PID控制器、RBF神經(jīng)網(wǎng)絡控制器和模糊RBF神經(jīng)網(wǎng)絡的PID控制器,在Simulink進行了仿真實驗,用plot函數(shù)繪出階躍響應信號仿真曲線,進行對比。PID控制器參數(shù)為 Kp=4,Ki=2,Kd=1.6。
在階躍輸入下,該系統(tǒng)采用模糊神經(jīng)網(wǎng)絡PID控制器的位置響應與其他兩種控制器的對比曲線如圖7所示。仿真結果表明,該系統(tǒng)在模糊神經(jīng)網(wǎng)絡PID控制器的作用下,超調(diào)量和調(diào)整時間明顯得到了改善。
另外,在t=6 s時給系統(tǒng)一個擾動,在各控制器的作用下,階躍響應曲線如圖8所示。對比發(fā)現(xiàn),當采用模糊RBF神經(jīng)網(wǎng)絡PID控制器時,受到負載干擾的影響較小,具有更好的性能。
4 結論
針對儲運發(fā)箱自動吊裝系統(tǒng)中存在的非線性,為克服PID控制器難以實現(xiàn)理想控制的缺點,設計了一種基于神經(jīng)網(wǎng)絡的模糊PID控制器。將模糊控制、神經(jīng)網(wǎng)絡與PID控制相結合,利用神經(jīng)網(wǎng)絡的自學習能力,實時調(diào)整網(wǎng)絡的權值,即調(diào)整模糊規(guī)則,從而得到一組適用于自動吊裝系統(tǒng)的Kp、Ki、Kd參數(shù)。該控制器能有效改善傳統(tǒng)PID控制中參數(shù)的自適應能力差和魯棒性差的缺陷,實現(xiàn)儲運發(fā)箱自動吊裝控制的自適應能力。仿真結果表明,采用RBF神經(jīng)網(wǎng)絡對模糊控制的規(guī)則進行優(yōu)化,整定PID控制參數(shù),可以提高該伺服系統(tǒng)的控制精度和抗干擾能力,體現(xiàn)出傳統(tǒng)單一的方法不具備的優(yōu)勢。
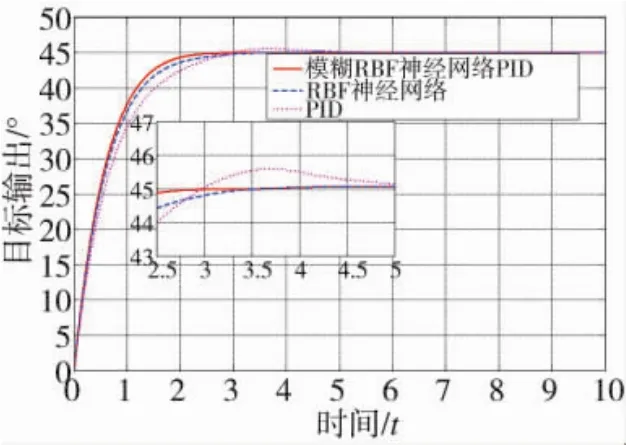
圖7 目標輸出角度為45°時的階躍響應曲線
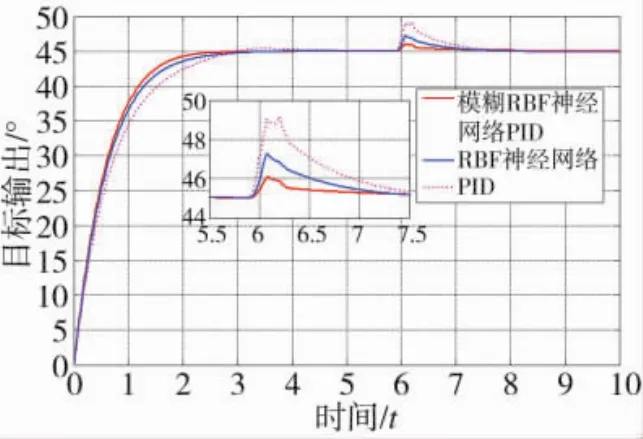
圖8 發(fā)生擾動時的階躍響應曲線
[1]何曉暉,王強,曾繁琦,等.基于無人化技術的軍用工程機械吊裝作業(yè)研究[J].裝備制造技術,2016,44(1):195-198.
[2]朱玉川,李志剛,馬大為,等.某箱式多管火箭炮自動裝填裝置設計[J].彈箭與制導學報,2006,26(1):97-99.
[3]魯霄光,李軍,張震,等.某儲運發(fā)射箱滿載吊裝響應分析[J].火炮發(fā)射與控制學報,2014,36(1):53-57.
[4]CHEN S Y,Hung Y H,Gong S S.Speed control of vane-type air motor servo system using proportional-integral-derivative-based fuzzy neural network[J].International Journal of Fuzzy Systems,2016,18(6):1065-1079.
[5]王天輝,李陽,王峰.基于模糊神經(jīng)網(wǎng)絡的伺服系統(tǒng)PID控制[J].火力與指揮控制,2014,39(4):153-156.
[6]胡永攀,陳循,陶利民,等.主動式波浪補償起重機液壓伺服系統(tǒng)數(shù)學建模與優(yōu)化[J].機床與液壓,2010,38(9):80-84.
[7]李拓彬.電液伺服系統(tǒng)神經(jīng)網(wǎng)絡控制策略研究與應用[D].長沙:中南大學,2013.
[8]張金龍,徐慧,劉京南,等.基于模糊神經(jīng)網(wǎng)絡的精密角度定位 PID 控制[J].儀器儀表學報,2012,33(3):549-554.
[9] WU Y M,CUI G Z,ZHANG X C.Fuzzy RBF neural PID control to simulation turntable servo system [J].Communications in Computer and Information Science,2014,472(2014):478-482.
[10]劉金琨.先進PID控制MATLAB仿真[M].北京:電子工業(yè)出版社,2016.
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
