深海多功能浮標(biāo)設(shè)計
2018-06-14 01:24:56,,,
船海工程 2018年3期
關(guān)鍵詞:設(shè)備
,,,
(中國船舶科學(xué)研究中心 深海載人裝備國家重點實驗室,江蘇 無錫 214082)
目前“蛟龍?zhí)枴薄吧詈S率俊钡壬詈]d人平臺主要依靠水面支持母船,實現(xiàn)深海高精度定位,以及與岸基之間的遠(yuǎn)距離通信。但隨著深海載人平臺續(xù)航能力的提升,對其自主能力提出了更高的要求,不再依賴水面母船的支持。因此,深海載人平臺獨(dú)自在深海長時間航行作業(yè)期間,如何獲取高精度的位置信息和實現(xiàn)與外界信息的遠(yuǎn)距離交互,成為深海載人平臺的迫切需求。
為此,國外相繼發(fā)展了多種體制的多功能浮標(biāo)技術(shù)和裝備,基本途徑是在水下釋放搭載導(dǎo)航定位、通信、光電探測等多種傳感器的浮體,上浮出水面快速執(zhí)行任務(wù)后立即回收或拋棄。按照浮標(biāo)是否可重復(fù)使用,可分為消耗型浮標(biāo)和可回收型浮標(biāo);按浮標(biāo)的連接方式,可分為有纜浮標(biāo)和無纜浮標(biāo)2種;按使用方式分主要有拋棄式浮標(biāo)、拖曳式浮標(biāo)和系留式浮標(biāo)3種[1],見表1。
國外多功能浮標(biāo)在設(shè)計時,為提高深海載人平臺的隱蔽性,未采用聲學(xué)定位的方式進(jìn)行水下位置的精確校準(zhǔn),因此浮標(biāo)雖能夠?qū)崿F(xiàn)自身高精度定位,但深海載人平臺無法獲得更為精確的水下位置。針對深海載人平臺的迫切需求,提出一種深海多功能浮標(biāo)的總體技術(shù)方案,以期實現(xiàn)深海載人平臺水下絕對位置的精確校準(zhǔn),遠(yuǎn)距離的語音和數(shù)據(jù)通信。

表1 國外多功能浮標(biāo)技術(shù)特點[2-4]
1 深海多功能浮標(biāo)技術(shù)指標(biāo)對比
1.1 多功能浮標(biāo)主要技術(shù)指標(biāo)要求
多功能浮標(biāo)主要技術(shù)指標(biāo)見表2。
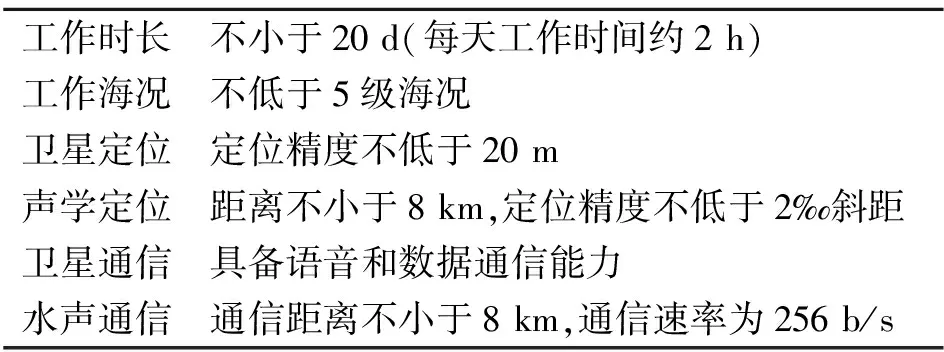
表2 多功能浮標(biāo)主要技術(shù)指標(biāo)[5]
1.2 有纜浮標(biāo)與無纜浮標(biāo)方案對比
有纜浮標(biāo)與無纜浮標(biāo)區(qū)別主要在于:深海載人平臺與多功能浮標(biāo)之間的數(shù)據(jù)傳輸及供電。
有纜浮標(biāo)優(yōu)點是深海載人平臺與多功能浮標(biāo)之間數(shù)據(jù)傳輸可靠,深海載人平臺能夠為多功能浮標(biāo)提供能源供給,能有效地減小多功能浮標(biāo)的重量和體積。其缺點是在深海載人平臺上需要增加收放多功能浮標(biāo)的絞車和電纜等設(shè)備,并且,由于多功能浮標(biāo)工作時,距離深海載人平臺有數(shù)千米的距離,多功能浮標(biāo)與深海載人平臺之間的電纜可能會對深海載人平臺的水下安全產(chǎn)生影響,同時浮標(biāo)也可能無法正常工作。
因此,為保證深海載人平臺水下航向作業(yè)的安全,以及減輕深海載人平臺總體負(fù)擔(dān),初步考慮采用無纜浮標(biāo)的方案。
2 多功能浮標(biāo)總體技術(shù)方案
2.1 多功能浮標(biāo)組成
多功能浮標(biāo)主要由控制主機(jī)、衛(wèi)星通信系統(tǒng)、衛(wèi)星定位系統(tǒng)、聲學(xué)應(yīng)答器、能源供應(yīng)系統(tǒng)、測量傳感器、設(shè)備艙、安裝固定裝置等組成[6],見圖1。
1)系統(tǒng)控制主機(jī)。系統(tǒng)控制主機(jī)用于深海載人平臺遙控多功能浮標(biāo)中各設(shè)備的啟停,以降低多功能浮標(biāo)各設(shè)備的功耗,控制主機(jī)平時處于休眠狀態(tài),通過用聲學(xué)應(yīng)答器對其喚醒開始工作。它通過聲學(xué)應(yīng)答器接收深海載人平臺發(fā)送的遙控指令及發(fā)送相關(guān)信息到深海載人平臺。
2)衛(wèi)星通信定位設(shè)備及天線。衛(wèi)星通信定位設(shè)備及天線用于深海載人平臺水下作業(yè)時與支持母船或岸基之間的數(shù)據(jù)傳輸,以及接收全球定位數(shù)據(jù)以確定多功能浮標(biāo)的絕對定位坐標(biāo)。天線安裝在多功能浮標(biāo)上,工作時要求浮在水面以上;收發(fā)主機(jī)則安裝在設(shè)備艙內(nèi),二者之間通過水密電纜相連實現(xiàn)微波通信。衛(wèi)星通信系統(tǒng)的啟停由控制主機(jī)控制。
3)聲學(xué)應(yīng)答器。聲學(xué)應(yīng)答器主要建立多功能浮標(biāo)與深海載人平臺之間的通信,同時確定多功能浮標(biāo)相對于水下深海載人平臺的相對位置。聲學(xué)應(yīng)答器包括控制主機(jī)和換能器兩部分。
4)高性能鋰電池。高性能鋰電池主要為多功能浮標(biāo)上的設(shè)備進(jìn)行供電。蓄電池量應(yīng)不小于60 Ah,因此選用軟包裝的24 V、20 Ah動力鋰電池三組并聯(lián)使用。
鋰電池組統(tǒng)一或單獨(dú)安裝在設(shè)備艙內(nèi),鋰電池組使用過程中的狀態(tài)通過多功能浮標(biāo)主機(jī)進(jìn)行監(jiān)控,并把相關(guān)數(shù)據(jù)發(fā)送到水下深海載人平臺。
5)其他設(shè)備。其他設(shè)備為可選設(shè)備,主要包括物化傳感器和CTD傳感器。主要用于在多功能浮標(biāo)的上浮過程中,對海洋物理化學(xué)參數(shù)進(jìn)行剖面測量。
2.2 多功能浮標(biāo)工作原理
按照對多功能浮標(biāo)的功能需求,與多功能浮標(biāo)相關(guān)的整個系統(tǒng)分為多功能浮標(biāo)、深海載人平臺和母船或岸基三部分,其工作原理如圖2所示。多功能浮標(biāo)與深海載人平臺不通過電纜連接,二者之間主要使用水聲信號進(jìn)行數(shù)據(jù)通信,工作時多功能浮標(biāo)由深海載人平臺水下釋放,多功能浮標(biāo)被釋放后依靠自身浮力浮到海面后開始建立通信鏈路,多功能浮標(biāo)把所接收到的水聲信號變成微波信號。通過通信衛(wèi)星實現(xiàn)與母船或岸基之間的通信,還可以接收定位衛(wèi)星信號以確定其在水面位置,然后深海載人平臺通過水聲定位或位置推算的方法在水下對其導(dǎo)航定位位置進(jìn)行校準(zhǔn)。多功能浮標(biāo)工作完成后水面母船或深海載人平臺通過作業(yè)潛器等方式回收。
3 浮標(biāo)橫搖性能分析
3.1 浮標(biāo)在靜水中的自由橫搖
假設(shè)浮標(biāo)在靜水中自由橫搖,忽略其阻尼力矩,只考慮慣性力矩和恢復(fù)力矩,則可計算浮標(biāo)自由橫搖的近似固有頻率nφ
(1)
式中:D為浮標(biāo)排水量;h為浮標(biāo)初穩(wěn)心高;Jφφ為浮標(biāo)轉(zhuǎn)動慣量;ΔJφφ為浮標(biāo)附加轉(zhuǎn)動慣量。
由式(1)可得浮標(biāo)自由橫搖的近似固有周期Tφ為
(2)
由式(2)可見,浮標(biāo)作小角度橫搖時,其橫搖固有周期同橫搖角的大小及持續(xù)時間無關(guān),僅僅取決于浮標(biāo)的排水量,初穩(wěn)心高及轉(zhuǎn)動慣量。
實踐表明轉(zhuǎn)動慣量對橫搖固有周期不很敏感,因此通常采用杜埃爾公式[7-9]進(jìn)行估算。
(3)
式中:g為重力加速度;B為浮標(biāo)直徑;zg為浮標(biāo)重心距基線的高度。當(dāng)h>0.15 m時,依據(jù)式(2)、式(3)可得
(4)
當(dāng)h<0.05 m時,
(5)
式中:φmax為最大橫搖角;r為橫穩(wěn)心半徑。
當(dāng)0.05≤h≤0.15 m時,可取式(4)、式(5)兩式計算結(jié)果的平均值。
3.2 浮標(biāo)在規(guī)則波中的橫搖運(yùn)動
浮標(biāo)在波浪上的橫搖運(yùn)動,歸結(jié)為分析計算浮標(biāo)在波浪上橫搖運(yùn)動的受力,并建立和求解的橫搖運(yùn)動方程。
浮標(biāo)橫搖主擾動力矩的計算,可根據(jù)傅汝德關(guān)于船在正橫波中的橫搖經(jīng)典理論[9-11],假定:
1)作用于浮標(biāo)上的規(guī)則波是穩(wěn)定的平面進(jìn)行波。
2)浮標(biāo)的存在不影響波浪質(zhì)點運(yùn)動。
3)浮標(biāo)處在正橫波上,其直徑、吃水與波長比較是很小的。
4)不考慮阻尼及附加質(zhì)量影響。
如圖3所示,假設(shè)浮標(biāo)在正橫波中的一個瞬時狀態(tài),它傾斜一個角度φ,水的作用力矩為
(6)
式中:α為波面角;h為初穩(wěn)心高。
假設(shè)附加質(zhì)量和阻尼力矩很小,可以忽略[12],且在小角度橫搖時,
(7)
式中:Jθθ為浮標(biāo)本身轉(zhuǎn)動慣量;Dhφ為浮標(biāo)橫傾角φ引起的恢復(fù)力矩;Dhα為波浪主擾動力矩。
整理(7)可得
(8)
式中:Tφ為浮標(biāo)橫搖的近似固有周期;Tα為波浪周期。
當(dāng)自由阻尼橫搖振幅衰減為0時,浮標(biāo)最大橫搖角為
(10)
式中:H為波高;L為波長。
3.3 多功能浮標(biāo)橫搖仿真驗證
浮標(biāo)在波浪中的橫搖性能與浮標(biāo)橫搖的固有周期和波浪周期有關(guān)。
由式(4)可知,浮標(biāo)橫搖的固有周期與浮標(biāo)直徑B、浮標(biāo)重心距基線的高度zg以及浮標(biāo)初穩(wěn)性高h(yuǎn)有關(guān)。浮標(biāo)在設(shè)計時,可減小浮標(biāo)直徑,降低浮標(biāo)重心位置。
浮標(biāo)重心為
(11)
將表3中浮標(biāo)設(shè)備的重量及尺寸代入式(11)中,可得浮標(biāo)重心距基線的高度zg約為0.21 m。
多功能浮標(biāo)需要在5級海況正常工作,為保證其定位和通信質(zhì)量,要求其橫搖角不大于10°。
經(jīng)查閱海上標(biāo)準(zhǔn)可知,5級海況平均波高H
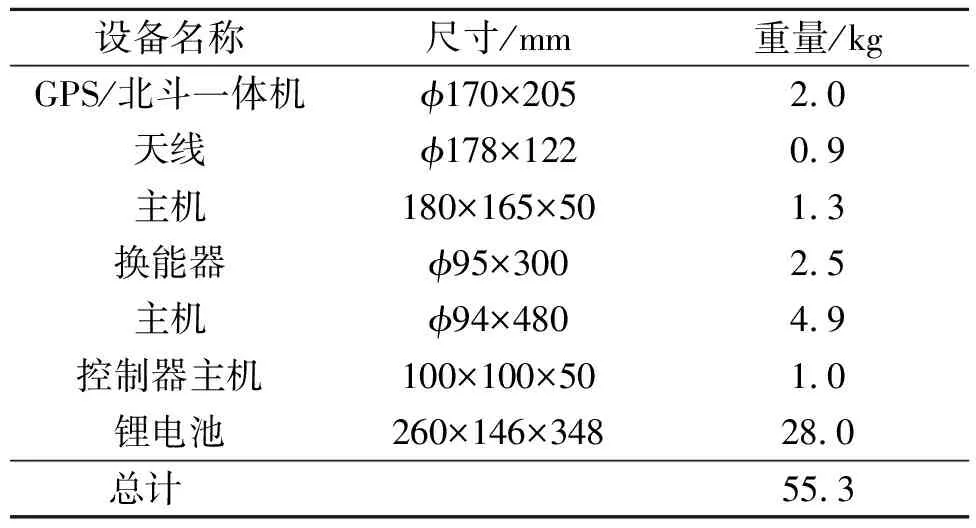
表3 多功能浮標(biāo)主要設(shè)備參數(shù)統(tǒng)計表
為1.311 m,平均波長L為30.18 m,波浪周期Tα為5.4 s,則多功能浮標(biāo)橫搖角度隨其固有周期的變化規(guī)律如圖4。
由圖4可見,為保證多功能浮標(biāo)具有較小的橫搖角度,則其固有周期應(yīng)盡量避開波浪周期。
多功能浮標(biāo)的總重量約為55.3 kg,則浮標(biāo)的排水體積D為0.054 m3,浮標(biāo)穩(wěn)心距基線的高度為zB,則橫穩(wěn)心半徑為
(12)
(13)
由式(4)、式(5)可繪制出多功能浮標(biāo)固有周期隨浮標(biāo)直徑的變化值,見圖5。
由圖5可見,多功能浮標(biāo)直徑選擇時,應(yīng)避開共振區(qū),即B應(yīng)盡量遠(yuǎn)離0.5~0.6 m。
綜合考慮多功能浮標(biāo)直徑為0.3 m,浮標(biāo)穩(wěn)心距基線的高度zB為0.38 m,初穩(wěn)心高h(yuǎn)為0.16 m,在5級海況的最大橫搖角φmax為8.29°,浮標(biāo)橫搖角符合設(shè)計要求。
4 結(jié)論
深海多功能浮標(biāo)具有體積小、重量輕、易搭載等特點,適合大部分深海載人平臺,有利于提高其水下高精度定位、遠(yuǎn)距離通信以及遇險救生通信的能力,為深海載人平臺水下導(dǎo)航和通信提供了新的手段。
后續(xù)將對圓柱形深海多功能浮標(biāo)在不規(guī)則波中的橫搖性能進(jìn)行分析和仿真,進(jìn)一步優(yōu)化深海多功能浮標(biāo)的直徑,并在水池中對設(shè)計結(jié)果進(jìn)行驗證,以使其在5級海況下具備最優(yōu)的橫搖性能。
[1] 梁璐,馬文驕,茆琳.國外潛艇通信浮標(biāo)類型及技術(shù)分析[J].現(xiàn)代工業(yè)經(jīng)濟(jì)和信息化,2015(20):73-75.
[2] 嚴(yán)巍.兩種新型潛艇通信浮標(biāo)研究概況[J].艦船電子工程,2006,26(4):31-34.
[3] 孫東平,榮海洋,張靖康.衛(wèi)星浮標(biāo)天線技術(shù)及其在潛艇通信中的應(yīng)用[J].裝備環(huán)境工程,2009,10(6):54-56.
[4] 劉瑞海,徐文濤,張良.潛用拋棄式有線浮標(biāo)及其關(guān)鍵技術(shù)[J].艦船科學(xué)技術(shù),2017,39(2):137-140.
[5] 楊會金,王嘉鑫,姚武軍.基于聲學(xué)和無線電通訊的海洋中繼浮標(biāo)技術(shù)[J].艦船科學(xué)技術(shù),2011,33(5):137-140.
[6] 王浩.深海浮標(biāo)的總體設(shè)計與計算分析[D].哈爾濱:哈爾濱工程大學(xué),2012.
[7] 曲少春,鄭琨,王英民.圓柱形浮標(biāo)運(yùn)動分析與仿真[J].計算機(jī)仿真,2010,27(6):363-366.
[8] 唐超,盧樹軍,朱江.海浪搖擺下的浮標(biāo)衛(wèi)星通信系統(tǒng)性能分析半[J].通信技術(shù),2016,49(6):729-734.
[9] 李積德.船舶耐波性[Ml.哈爾濱:哈爾濱工程大學(xué)出版社,2007.
[10] 鄢文軍,劉衛(wèi)斌,劉云輝,等.一種浮標(biāo)自由上浮模型試驗換算方法[J].船海工程,2011,10(5):172-179.
[11] 李玉成,王鳳龍,康海貴.作用于小尺度圓柱上的波浪、水流力[J].海洋工程,1993(3):46-59.
[12] 楊瑞,劉寅東,顧群,等.海上溢油跟蹤定位浮標(biāo)參數(shù)分析及技術(shù)優(yōu)化研究[J].船海工程,2014,8(4):101-106.
猜你喜歡
中國特種設(shè)備安全(2022年6期)2022-09-20 02:52:28
當(dāng)代工人(2020年13期)2020-09-27 23:04:20
經(jīng)濟(jì)技術(shù)協(xié)作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年10期)2018-08-04 03:24:48
家庭影院技術(shù)(2017年11期)2017-12-20 08:10:57
工業(yè)設(shè)計(2016年12期)2016-04-16 02:52:00
IT時代周刊(2015年8期)2015-11-11 05:50:37
汽車維修與保養(yǎng)(2015年1期)2015-04-17 03:25:28
設(shè)備管理與維修(2015年12期)2015-04-09 06:57:00