基于WirelessHART的半密閉船艙人員定位系統(tǒng)設(shè)計(jì)
2018-06-14 07:15:20楊國良
軟件 2018年5期
關(guān)鍵詞:實(shí)驗(yàn)
楊國良
(上海理工大學(xué) 光電信息與計(jì)算機(jī)工程學(xué)院,上海 200093)
0 引言
裝有貨物的半密閉船艙內(nèi)部環(huán)境十分惡劣,建立用于半密閉船艙的人員定位系統(tǒng),對(duì)于預(yù)防事故的發(fā)生與人員的搜救都有著極為重要的意義。類似于船艙等特殊的工作場(chǎng)景,因其結(jié)構(gòu)復(fù)雜,信號(hào)傳輸率低等特點(diǎn),目前沒有一個(gè)很好的定位解決方案。因此,設(shè)計(jì)一套定位精準(zhǔn),低功耗,可靠傳輸?shù)娜藛T定位系統(tǒng)意義重大。
本文將DecaWave公司的DWM1000模塊集成到WirelessHART網(wǎng)絡(luò)中。采用最新的UWB技術(shù),利用脈沖信號(hào)到達(dá)的時(shí)間差來測(cè)量節(jié)點(diǎn)間的距離,進(jìn)而對(duì)節(jié)點(diǎn)進(jìn)行定位。相對(duì)于其他的一些無線通信技術(shù)而言,UWB有著發(fā)射功率較低,傳輸速率塊,穿透能力強(qiáng)并且是基于極窄脈沖的無線技術(shù),無載波等優(yōu)點(diǎn)[1]。結(jié)合WirelessHART網(wǎng)絡(luò)的低功耗和可靠的良好特性,該系統(tǒng)能很好地部署在半密閉船艙的環(huán)境中并完成工作人員的定位。
1 W irelessHART技術(shù)
WirelessHART(Wireless Highway Addressable Remote Transducer)是HART通訊基金會(huì)為工業(yè)過程控制研制的一個(gè)開放標(biāo)準(zhǔn)的無線網(wǎng)絡(luò)技術(shù),也是第一個(gè)用于過程控制的國際無線標(biāo)準(zhǔn)(IEC 62591),支持 IEEE 802.15.4標(biāo)準(zhǔn)的 2.4GHz ISM 頻段[2]。WirelessHART是一種具有時(shí)鐘同步、自組織和可治愈的網(wǎng)狀網(wǎng)絡(luò)結(jié)構(gòu),擁有低成本、低功耗、高可靠性等優(yōu)點(diǎn),其能夠快速兼容現(xiàn)有有線設(shè)備工具和系統(tǒng)[3]。WirelessHARTTM技術(shù)進(jìn)一步促進(jìn)了無線技術(shù)在工業(yè)自動(dòng)化領(lǐng)域的廣泛應(yīng)用[4]。
2 定位系統(tǒng)的整體框架
系統(tǒng)的構(gòu)架如圖1所示,定位系統(tǒng)由硬件平臺(tái)與上位機(jī)軟件組成。硬件系統(tǒng)是由網(wǎng)關(guān),基站和標(biāo)簽節(jié)點(diǎn)三部分組成。網(wǎng)關(guān)通過以太網(wǎng)接收上位機(jī)發(fā)送來的命令,進(jìn)行WirelessHART網(wǎng)絡(luò)的組網(wǎng),初始化設(shè)置以及對(duì)該網(wǎng)絡(luò)區(qū)域中的各個(gè)節(jié)點(diǎn)進(jìn)行時(shí)鐘同步與管理。基站節(jié)點(diǎn)主要負(fù)責(zé)對(duì) UWB脈沖信號(hào)TOA數(shù)據(jù)進(jìn)行采集與傳輸,將WirelessHART網(wǎng)絡(luò)中的數(shù)據(jù)傳送給網(wǎng)關(guān),網(wǎng)關(guān)將接收到的數(shù)據(jù)發(fā)送到上位機(jī)。上位機(jī)軟件負(fù)責(zé)處理TOA數(shù)據(jù),調(diào)用定位算法將標(biāo)簽的位置以圖形化和坐標(biāo)的形式顯示。
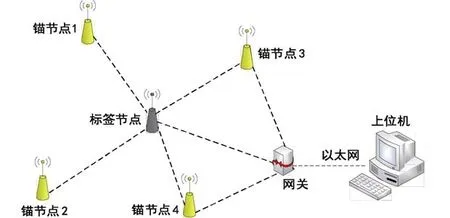
圖1 系統(tǒng)框架Fig.1 Sy stem framework
3 系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)
3.1 WirelessHART網(wǎng)絡(luò)部署
WirelessHART網(wǎng)絡(luò)節(jié)點(diǎn)集成DecaWave公司開發(fā)的DW1000芯片,其兼容IEEE802.15.4-2011協(xié)議的超寬帶無線收發(fā)芯,在實(shí)時(shí)定位系統(tǒng)中用于物體的定位,精度高達(dá)厘米級(jí)別[5]。本系統(tǒng)中一個(gè)定位區(qū)域內(nèi)部署1個(gè)網(wǎng)關(guān)和4個(gè)錨節(jié)點(diǎn)以及一個(gè)標(biāo)簽節(jié)點(diǎn)。網(wǎng)關(guān)負(fù)責(zé)網(wǎng)絡(luò)的組網(wǎng)細(xì)節(jié)。錨節(jié)點(diǎn)是坐標(biāo)位置已知的固定節(jié)點(diǎn),它的存在是為了給移動(dòng)的標(biāo)簽節(jié)點(diǎn)計(jì)算坐標(biāo)提供數(shù)據(jù)支持的。標(biāo)簽節(jié)點(diǎn)則是船艙工作者隨身攜帶的移動(dòng)節(jié)點(diǎn),其位置通過調(diào)用定位算法得出。節(jié)點(diǎn)部署完成后,網(wǎng)關(guān)會(huì)和定位區(qū)域中的各個(gè)錨節(jié)點(diǎn)通信,完成網(wǎng)絡(luò)的初始化和組網(wǎng)工作。
3.2 克拉美羅下界
克拉美羅下界(Cramer-Rao Lower Bound, CRLB)是TOA估計(jì)算法在理論上的一個(gè)界限值[6],文獻(xiàn)[7-8]對(duì)于單一路徑的加性高斯白噪聲信道,通過數(shù)學(xué)理論證明從 TOA估計(jì)中獲取的能夠?qū)崿F(xiàn)的最佳精度的距離估計(jì)滿足下列不等式

(1)式中,C為光速,SNR為信道信噪比,β為有效信號(hào)帶寬,其定義為:
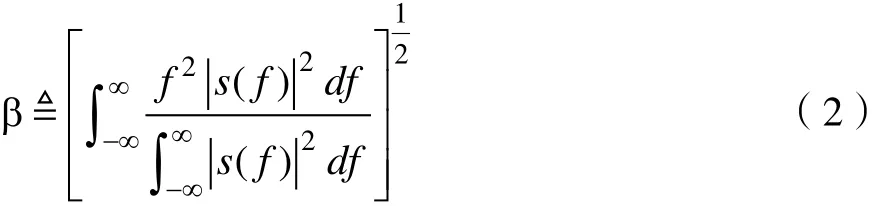
其中,S(f)為發(fā)送信號(hào)的傅里葉變換。
由(1)(2)兩式可以得出,提高信噪比或者加大有效帶寬都可以有效的提高TOA估計(jì)的精度,由于UWB具有相當(dāng)大的帶寬,所以基于TOA的定位技術(shù)可以充分利用 UWB高帶寬的特性實(shí)現(xiàn)精準(zhǔn)可靠的定位。
3.3 DS 測(cè)距(Double-sided Two-way Ranging)
標(biāo)簽節(jié)點(diǎn)和錨節(jié)點(diǎn)間距離的測(cè)量是 TOA定位技術(shù)的關(guān)鍵,與單邊測(cè)距相比,雙邊測(cè)距在單邊測(cè)距的基礎(chǔ)上再增加一次通訊,兩次通訊的時(shí)間可以互相彌補(bǔ)因?yàn)闀r(shí)鐘偏移引入的誤差[9],其中測(cè)距過程如圖2所示。
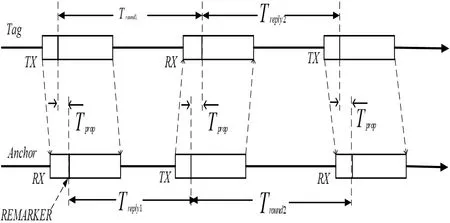
圖2 DS 測(cè)距示意圖Fig.2 DS range mapping
標(biāo)簽節(jié)點(diǎn)首先向錨節(jié)點(diǎn)發(fā)送POLL數(shù)據(jù)包,并記下發(fā)送時(shí)間T1,并在一段時(shí)間后打開RX。錨節(jié)點(diǎn)要提前打開接收,收到POLL數(shù)據(jù)包后,記錄時(shí)間 T2。錨節(jié)點(diǎn)在 T3(T3=T2+Treply1)時(shí)刻發(fā)送Response數(shù)據(jù)包,發(fā)送完成之后打開 RX。標(biāo)簽節(jié)點(diǎn)收到 Response數(shù)據(jù)包,記錄時(shí)間 T4,并在T5(T5=T4+ Treply2)發(fā)送Final數(shù)據(jù)包。錨節(jié)點(diǎn)收到Final數(shù)據(jù)包后,記錄時(shí)刻 T6。根據(jù) 6個(gè)時(shí)刻值可以推出一次雙邊通信中電磁波的飛行時(shí)間Tprop為

其中Tround1 = T4 - T1 Tround2 = T6 - T3 Treply1 = T3 - T2 Treply2 = T5 - T4
Tprop乘以光速則為標(biāo)簽節(jié)點(diǎn)到錨節(jié)點(diǎn)兩者之間的距離。標(biāo)簽移動(dòng)節(jié)點(diǎn)測(cè)量獲得到其與網(wǎng)絡(luò)中各個(gè)錨節(jié)點(diǎn)的距離后,將此數(shù)據(jù)經(jīng)由網(wǎng)關(guān)傳送給上位機(jī),上位機(jī)調(diào)用定位算法則可以計(jì)算出標(biāo)簽節(jié)點(diǎn)的位置。
3.4 極大似然估計(jì)法
TOA定位技術(shù)根據(jù)是信號(hào)到達(dá)時(shí)間差為理論基礎(chǔ)完成定位的。在立體空間中需要四個(gè)固定基站,在二維平面則需要三個(gè)基站。當(dāng)發(fā)射信號(hào)從標(biāo)簽節(jié)點(diǎn)到基站的時(shí)間為t,那么時(shí)間t乘以電磁波的傳播速度可以得到標(biāo)簽節(jié)點(diǎn)到參考基站的距離,同理,可以獲得此標(biāo)簽節(jié)點(diǎn)與其他基站的距離。以兩者的距離為半徑做圓,由幾何知識(shí)可知,三個(gè)圓的交點(diǎn)為標(biāo)簽節(jié)點(diǎn)的實(shí)際位置[10]。原理如圖3所示。
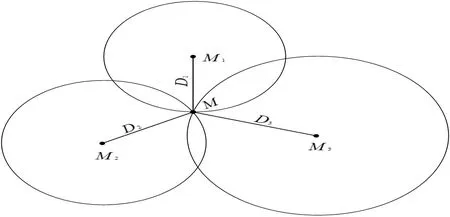
圖3 二維空間TOA定位原理圖Fig.3 T wo-dimensional space TOA positioning principle diagram
假設(shè)移動(dòng)標(biāo)簽節(jié)點(diǎn)得到其與三個(gè)以上并且不位于同一直線的基站節(jié)點(diǎn)之間的距離時(shí),
極大似然估計(jì)算法的基本思想可以描述為:
當(dāng)有n個(gè)參考節(jié)點(diǎn)1, 2, 3…n,設(shè)它們的坐標(biāo)分別為(x1,y1),(x2,y2),(x3,y3)…(xn,yn),位置未知的標(biāo)簽節(jié)點(diǎn)為 M,其坐標(biāo)為(x,y),標(biāo)簽節(jié)點(diǎn) M到各個(gè)錨節(jié)點(diǎn)的距離分別為d1,d2,d3…dn,則有
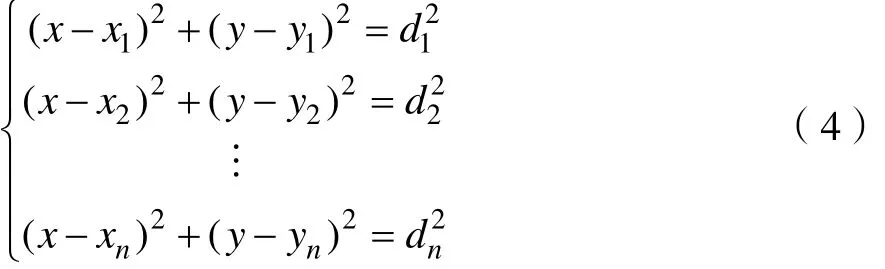
將方程組(4)整理成AX=b的形式,其中
通過最大似然估計(jì)方法,可以得到標(biāo)簽節(jié)點(diǎn)M的坐標(biāo)位置(x,y)[11]:

3.5 上位機(jī)軟件設(shè)計(jì)
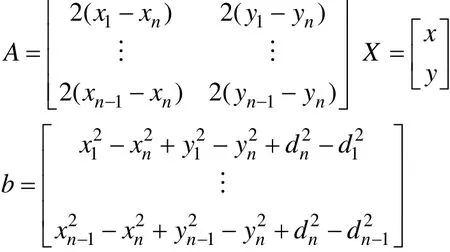
上位機(jī)軟件系統(tǒng)是基于 C++語言開發(fā)。按其功能可以分為數(shù)據(jù)獲取、定位計(jì)算和圖形界面顯示層三部分。數(shù)據(jù)獲取層完成與網(wǎng)關(guān)的通信,通過以太網(wǎng)將標(biāo)簽節(jié)點(diǎn)與每個(gè)基站之間的距離傳送給上位機(jī)。定位計(jì)算層對(duì)獲取的數(shù)據(jù)進(jìn)行處理,調(diào)用定位算法對(duì)標(biāo)簽節(jié)點(diǎn)的位置進(jìn)行定位。圖形界面提供定位顯示界面,支持地圖導(dǎo)入模式,將標(biāo)簽節(jié)點(diǎn)的位置實(shí)時(shí)的顯示在地圖上。
4 實(shí)驗(yàn)設(shè)計(jì)與數(shù)據(jù)分析
4.1 實(shí)驗(yàn)設(shè)計(jì)
本實(shí)驗(yàn)以學(xué)校工科實(shí)驗(yàn)室為實(shí)驗(yàn)場(chǎng)所進(jìn)行測(cè)試。該實(shí)驗(yàn)室長(zhǎng)10.4米,寬7.2米。實(shí)驗(yàn)室有各種實(shí)驗(yàn)儀器儀表,多張?jiān)囼?yàn)臺(tái),工作環(huán)境比較復(fù)雜,可以比較貼近的模擬船艙內(nèi)的工作環(huán)境。實(shí)驗(yàn)將 4個(gè)基站節(jié)點(diǎn)分別放在實(shí)驗(yàn)室的四個(gè)角的位置,網(wǎng)關(guān)安放在任意的的試驗(yàn)臺(tái)上。實(shí)驗(yàn)人員手持標(biāo)簽節(jié)點(diǎn)圍繞試驗(yàn)臺(tái)隨機(jī)的移動(dòng)。從上位機(jī)軟件可以觀察到操作人員的移動(dòng)軌跡。定位結(jié)束后,上位機(jī)軟件會(huì)自動(dòng)的保存標(biāo)簽節(jié)點(diǎn)在對(duì)應(yīng)時(shí)間點(diǎn)的位置坐標(biāo),從而達(dá)到定位跟蹤的作用。
4.2 實(shí)驗(yàn)數(shù)據(jù)分析
基站節(jié)點(diǎn)的實(shí)際位置如下表1所示。
隨機(jī)的在實(shí)驗(yàn)區(qū)域選取 5個(gè)點(diǎn)作為定位測(cè)試點(diǎn),每個(gè)點(diǎn)均測(cè)試10次取其平均值作為實(shí)驗(yàn)值。具體的實(shí)驗(yàn)結(jié)果見下表2。
通過實(shí)驗(yàn)數(shù)據(jù)可以看出該定位系統(tǒng)在隨機(jī)的 5個(gè)測(cè)試點(diǎn)中,定位最精準(zhǔn)的測(cè)量誤差為 8.6 cm,最大的定位誤差僅為14.5 cm,平均誤差為10.96 cm。相比于Zigbee,Wifi與RFID等傳統(tǒng)的定位模式,結(jié)合WirelessHART與UWB的定位系統(tǒng)具有更高的定位精度。本文的實(shí)驗(yàn)場(chǎng)景的選擇具有一定的代表性,實(shí)驗(yàn)定位也有著較高的精度,所以該方案具有一定的實(shí)用性。
5 結(jié)論
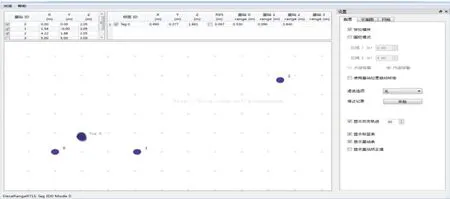
圖4 上位機(jī)軟件界面Fig.4 Host computer software interface
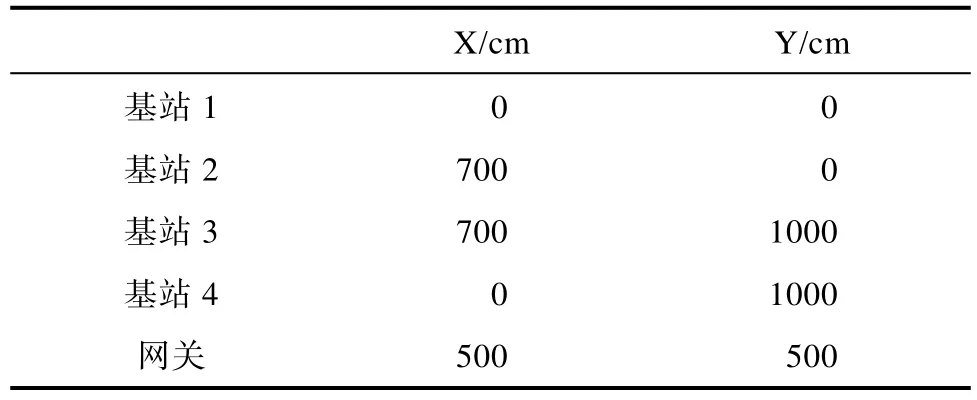
表1 實(shí)際位置坐標(biāo)Tab.1 Actual position coordinates
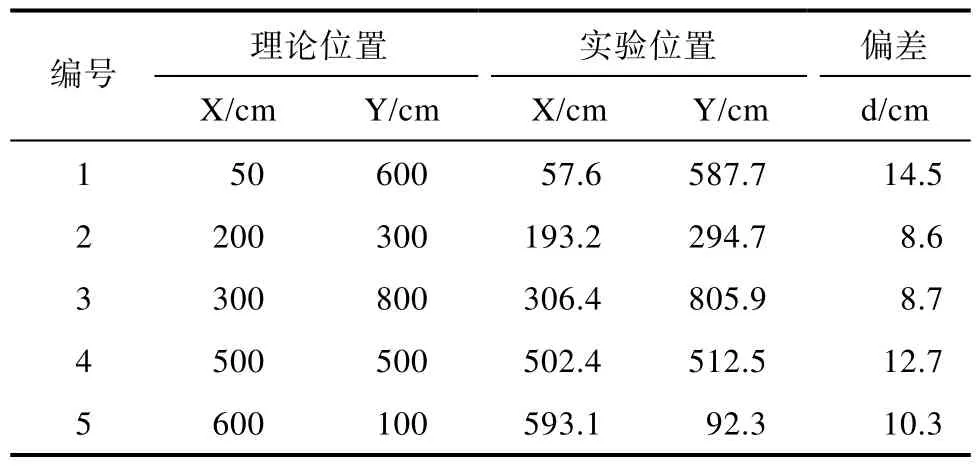
表2 實(shí)驗(yàn)位置坐標(biāo)Tab.2 Expe rimental position coordinates
本文研究并設(shè)計(jì)了一套適用于半密閉船艙等特殊場(chǎng)景的定位系統(tǒng)。該系統(tǒng)完成了 WirelessHART與DWM1000模塊的集成,利用UWB與DS測(cè)距技術(shù)實(shí)現(xiàn)了TOA數(shù)據(jù)的采集,通過WirelessHART網(wǎng)絡(luò)的傳輸與極大似然估計(jì)算法完成了比較精確的定位。實(shí)驗(yàn)結(jié)果顯示該定位系統(tǒng)可以部署在實(shí)際的應(yīng)用場(chǎng)景,并且定位精度可以達(dá)到10 cm以內(nèi)。本實(shí)驗(yàn)僅在定位系統(tǒng)中只存在單個(gè)標(biāo)簽的環(huán)境下進(jìn)行,當(dāng)有多個(gè)移動(dòng)標(biāo)簽加入網(wǎng)絡(luò)時(shí)避免標(biāo)簽彼此之間的干擾同時(shí)達(dá)到更高的定位精度是下一步的研究工作。
[1] 曹福成, 王樹勛, 孫曉穎. 基于子空間的DS-UWB系統(tǒng)高分辨率低復(fù)雜度時(shí)延估計(jì)[J]. 吉林大學(xué)學(xué)報(bào)(工學(xué)版),2008, 38(2): 471-475.
[2] 彭瑜. 無線HART協(xié)議— 一種真正意義上的工業(yè)無線短程網(wǎng) 協(xié)議的概述和比較[J]. 儀器儀表標(biāo)準(zhǔn)化與計(jì)量, 2007. 5:31-37.
[3] HART Network Management Specification (HCF_SPEC -085,Revision 1.0)[S]. 2007. 4.
[4] Le-Trung Q, Taherkordi A, Skeie T, Pham H N, Engelstad P E. Information Storage, Reduction and Dissemination in Sensor Networks: A Survey [C]. IEEE Consumer Communications and Networking Conference, 2009: 1-6.
[5] 王保云, 物聯(lián)網(wǎng)技術(shù)研究綜述[J]. 電子測(cè)量與儀器學(xué)報(bào),2009, 23(12): 1-7.
[6] Aftanas M, Rovnakova J, Drutarovsky M, et al. Efficient method of TOA estimation for through wall imaging by UWB radar[A]. Proc. of International Conference on Ultra-Wideband, ICUWB' 08[C]. Hannover, Germany, 2008,2. 101104.
[7] Alavi B, Pahlavan K. Modeling of the TOA-based distance measurement error using UWB indoor radio measurements[J].IEEE Communications Letters, 2006, 10(4): 275-277.
[8] 吳紹華, 張乃通. 基于UWB的無線傳感器網(wǎng)絡(luò)中的兩步TOA估計(jì)法[J]. 軟件學(xué)報(bào). 2007, 18(5): 1164-1172.
[9] 賀晶晶, 姜平, 馮曉榮. 基于UWB的無人運(yùn)輸車的導(dǎo) 20航定位算法研究[J]. 電子測(cè)量與儀器學(xué)報(bào), 2016, 30(11):17431749.
[10] 張?jiān)孪? 陶小峰, 張平. 超寬帶通信系統(tǒng)加權(quán)移動(dòng)三角形到達(dá)時(shí)間精確定位算法[J]. 吉林大學(xué)學(xué)報(bào): 工學(xué)版, 2010,40(1): 266-270.
[11] Roy S, Foerster J R, Somayazulu V S. Ultrawideband radio design: The promise of high-speed short-range wireless connectivity[J]. IEEE Proceedings, 2004, 92(2): 295-311.
猜你喜歡
作文·小學(xué)低年級(jí)(2025年2期)2025-02-13 00:00:00
小雪花·小學(xué)生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學(xué)低年級(jí)(2024年2期)2024-04-29 00:00:00
作文·小學(xué)低年級(jí)(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(bào)(2022年4期)2022-08-09 08:52:06
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
