車載單天線GPS/MEMS-SINS組合對準算法
2018-06-15 02:07:50
導航與控制 2018年3期
關鍵詞:系統
(華東師范大學空間信息與定位導航上海高校工程中心,上海200241)
0 引言
對于捷聯式慣性導航系統來說,高精度的慣性傳感器和導航解算算法是不可或缺的部分。高精度慣性器件如激光陀螺儀價格昂貴、體積較大,限制了捷聯式慣性導航系統的應用。而微機電系統(MEMS)技術的發展使得利用體積小、質量小、成本低、功耗小、可靠性高、易于集成的MEMS慣性傳感器來進行慣性導航解算成為現實。但是由于MEMS傳感器的精度較低,所以進行導航的初始對準是一項挑戰。
綜合緯度關系、地形地勢、季風以及洋流等多重因素影響,舟山全年呈現北亞熱帶南緣季風海洋型氣候特征,溫暖濕潤,冬暖夏涼,光照充足,但在夏季較易受臺風和雷電天氣侵襲,并時常伴有伏旱,冬季多濃霧和寒潮大風[1]。
捷聯式慣性導航系統的導航解算是在給定的初始狀態值的基礎上遞推運算進行的,所以初始狀態值的給定即初始對準的精度將直接決定導航系統的精度。進行對準的方法大體上可以分為3種:自對準、傳遞對準和組合對準。自對準算法有經典靜基座對準算法、基于頻域分離算子的自對準算法[1]、基于比力或速度量測的Kalman濾波對準算法[2]。但是自對準算法對慣性傳感器中陀螺儀的精度要求較高,一般的MEMS陀螺儀由于精度較低,無法敏感到地球自轉角速度,因而無法完成自對準。傳遞對準系統一般由精度較高的主慣導和待對準的子慣導組成,也有粗對準和精對準兩個過程。其中,粗對準階段需要主慣導系統給出姿態、速度、位置信息來讓子慣導完成裝訂;裝訂完成后的精對準階段,傳遞對準濾波器對子慣導系統的誤差參數進行估計后,再將估計出的誤差量反饋給子慣導系統進行修正,完成初始對準[3]。這種對準方法要求主慣導系統有較高的精度,成本比較高。組合對準一般利用外部量測信息在組合濾波器中完成對慣性系統的誤差參數估計和校正,實現對準。常見的對準方式有磁力計組合對準和多天線GNSS組合對準。其中,磁力計組合對準受磁場強度影響較大,系統工作穩定性不佳;而多天線對準系統結構復雜,安裝難度大,各個天線之間也存在較大的接收延遲。
本文提出了一種車載低動態單天線GPS與MEMS慣性導航系統組合對準的算法。在動態情況下,單天線GPS可以提供精度可用的航向角信息;而在勻速直線或近似勻速直線運動情況下,MEMS加速度計的零偏優于1mg,相應的俯仰角和橫滾角誤差在0.1°以內,所以也能由加速度計計算載體的俯仰角和橫滾角。以此作為粗對準的姿態信息,再在精對準階段利用單天線GPS提供的航向角、位置和速度信息作為觀測量,利用Kalman濾波對捷聯慣導系統誤差參數進行估計和反饋,完成對準過程。仿真分析和車載試驗驗證了對準算法的實用性和可行性。
1 組合對準
1.1 單天線GPS測姿
載體的姿態信息一般是由載體坐標系相對于當地地理坐標系的Euler角:航向角Ψ、俯仰角θ、橫滾角φ來描述的。單天線測姿方法一般是在載體進行穩定協調運動時利用GPS輸出的速度測量進行姿態解算,解算出的姿態實際上是載體的速度矢量相對于地理坐標系的旋轉角度,與Euler姿態角存在著側滑角和攻角的差異,因而被稱為偽姿態角。當載體進行協調運動時,偽姿態角與姿態角性能相當,所以可以利用偽姿態角作為初始姿態角對捷聯慣導系統進行對準。假設GPS輸出的地理坐標系下載體速度分量為VE、VN和VU,則偽姿態角中航向角ψ′和俯仰角θ′為[4]:
“1959年,我與石魯奉調北京創作革命歷史畫。我們一起住在雨兒胡同白石老人的故居。當時我接到的創作題目是《毛澤東同志在廣州農民運動講習所》,他接到的題目是《轉戰陜北》。開始創作時,我就遇到技術上的問題,農講所頂樓的大塊瓦片怎么才能表現出層次?石魯告訴我,不要考慮那么多西洋畫的透視觀念,他讓我用傳統國畫的方法,一層層地按照瓦片的結構畫。為此他還給我示范,邊講邊畫,畫了農講所,還畫了石頭、竹子等南方景觀,我于是受到啟發。至今他為我畫的這幅草稿還藏在我家里。”
1.2 對準方案
組合對準過程分為兩個階段,粗對準階段在動態情況下給出初始的位置速度信息和姿態信息。其中,由單天線GPS接收機給出位置、速度和航向角信息;在勻速直線或近似勻速直線運動情況下,可由MEMS加速度計根據式(3)、式(4)獲得相應的橫滾角和俯仰角[7],從而獲得粗略的姿態矩陣。
為及時準確反映企業材料領、用、存狀況,正確核算材料成本,從2006年起,財務部門充分利用財務軟件的管理功能,與材料管理部門實現數據聯網,對庫存材料的領、用、存情況做到實時反映;委托軟件開發商增強財務數據合并匯總功能,實現了從財務數據庫中進行材料、配件的跨年度分種類合并匯總,大大提高了工程決算的速度和準確性;同時加強對工程決算階段甲供材料領用的核對,堵塞了工程材料的領用漏洞,降低了庫存材料所占用的資金,提高了企業的經濟利益.
其中,
國家局提出數據中心建設,歸根到底是要為行業發展和企業決策提供及時、準確、系統的信息支撐,因此,對數據進行統一管理顯得尤為重要。一是要保證信息數據源頭的質量,即各應用系統的數據是嚴格按照相應的規范采集的,是依法、依規、依標準的可加工和交換的數據;二是要建立數據質量的控制體系,數據的加工、存儲、交換的過程嚴謹有序,不出差錯,以保證數據中心的數據質量;三是要按照“授權訪問,各取所需”的規則發布數據,避免信息發布的失控,做到“數入一庫,數出一門”;四是要采用專業的統計分析技術,對數據中心海量的數據信息進行深度的挖掘和分析,將數據資源提煉為決策資源,以提高信息資源的增值服務。
1.3 濾波模型
(1)系統狀態方程
運用現代媒體,提高教學生動效果。一方面,教師可以借助多媒體手段更好的進行課堂導入,如播放與課堂有關的教學視頻,用音樂來增添課堂的氛圍,自主設計教學課件,從而使教學活動更加貼近學生的身心特點,讓學生更好的融入課堂;另一方面,教師還可以借助多媒體,引導學生鑒賞經典作品,拓展學生的美術視野,提高其審美意識。為學生創造力的培養奠定基礎。
資產評估從業人員在經過了前15年的飛速增加后,開始逐漸趨于平緩,這和資產評估行業的快速發展是相背離的。除了在人才培養方面的一些劣勢,人才流失嚴重也是很重要的因素,尤其在小型資產評估企業更為突出。究其原因大部分是薪酬方面設置不公,許多資產評估機構內部激勵機制不完善,使資產評估人員對于資產評估行業的前景不看好,紛紛跳槽到其他行業,使得最近幾年資產評估行業專業人才增長緩慢,從業人員緊缺,無法滿足資產評估市場的需求,阻礙資產評估行業的進一步發展。
系統選取東北天坐標系(n系)為導航坐標系,并選取SINS的姿態角誤差、速度誤差、位置誤差、載體系(b系)陀螺等效零偏、載體系加速度計等效零偏等共15維狀態變量,用X表示為:

狀態方程為:

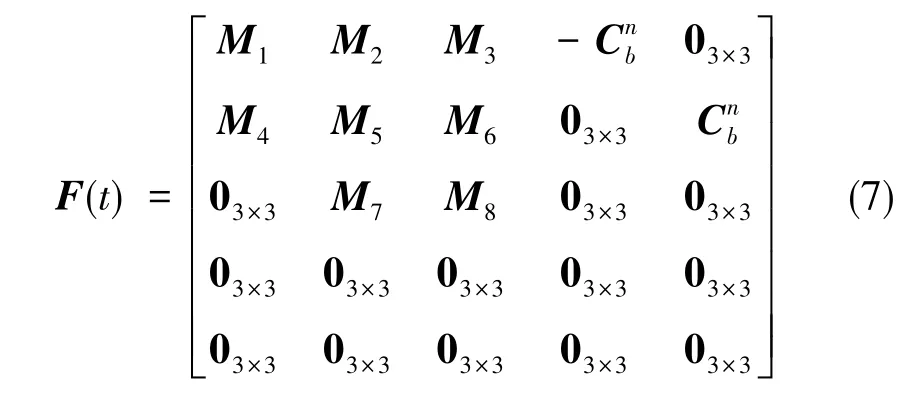
其中,w(t)是系統噪聲矩陣。經由捷聯慣導系統的誤差模型[8]可得狀態轉移矩陣,可以表示為:
在學校教學當中,護士在進行護理理論知識的學習過程當中,對醫院感染相關知識只做了部分學習,并沒有將其作為一門學科來進行系統的學習,這就導致低年資護士在工作中,對醫院感染的重視程度不高。所以要對全體醫護人員開展醫院感染相關知識的培訓工作,通過采用多樣化的培訓形式,將醫院感染知識印刷成冊進行發放,有計劃、有目標地制定學習計劃與考核方案。不斷地對醫院感染防控意識進行強化,促進院感管理工作能夠順利開展。并且在新護士的崗前培訓中增加醫院感染知識內容,對護理的操作流程進行規范,從點滴做起,狠抓基本功,不斷提高新護士的無菌觀念、感控意識與綜合素質。
SINS在粗對準給出的初始信息基礎上,進行導航解算。在精對準階段,利用單天線GPS給出的速度、位置、航向角信息建立Kalman濾波器,對SINS解算的姿態角誤差、速度誤差、位置誤差、陀螺零位誤差以及加速度計的零偏進行估計,然后對輸出的姿態、速度和位置進行反饋修正,完成對準。
而偽橫滾角的計算涉及由載體東北天速度求取地理坐標系下載體加速度的問題。文獻[5]給出了相應的解法,其中在求取相應橫滾角的過程中結合飛行器力學原理進行橫滾角的計算。但在車載和船載等低速運動的載體并且運動形式不符合飛行力學的情況下,很難獲得相對精確的橫滾角。文獻[6]對低動態情況下單天線測姿存在的誤差進行了分析,并且其車載實驗顯示,在靜止或者較低速(2m/s~3m/s以下)情況下, 單天線測姿的測量誤差較大,基本不可用。所以,組合對準要求載體的速度在3m/s以上。

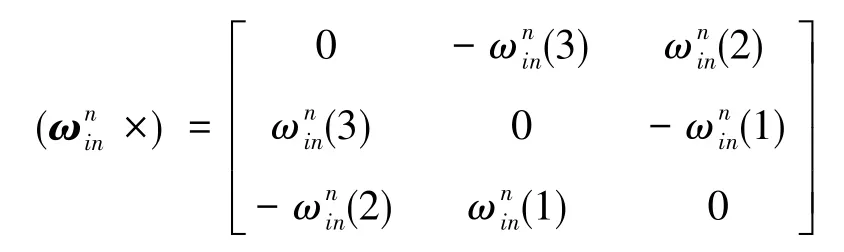
式中,表示導航系相對于慣性系的旋轉,它包含兩部分:地球自轉角速度在導航系的投影和載體相對地球表面運動帶來的角速度在導航系的投影,即有。表示由構成的反對稱矩陣,后面同理。
2)10s~20s,勻加速直線運動。航向為正北方向, 加速度大小為 1m/s2, 速度從 0m/s變為10m/s。

(2)系統量測方程
系統量測方程為:

對載體的速度進行計算,速度大于閾值3m/s時,,即采用單天線測姿的航向角與SINS解算得到的航向角之間的失準角以及兩個系統輸出的速度和位置差值作為觀測量。量測矩陣H7×15的非零元為H(1, 3)= H(2, 4)= H(3, 5)= H(4, 6)= H(5, 7)=H(6, 8)= H(7, 9)= 1,v(t)是量測噪聲矩陣。
2.2.5 穩定性試驗 按照“2.2.1”項下的方法制備供試品溶液,分別于0、2、4、6、8、12、24 h進樣,精密吸取供試品溶液10 uL,注入液相色譜儀,記錄葛根素的峰面積。結果平均峰面積為7 592 098.7,RSD值為0.25%,表明樣品在24 h內穩定。
速度小于閾值時,則僅采用速度和位置之差作為觀測量,相應的量測矩陣H6×15的非零元為H(1, 4)=H(2, 5)=H(3, 6)=H(4, 7)=H(5, 8)= H(6, 9)= 1。
其中,ax、ay、az分別是加速度計三軸的輸出。
綜上所述,污水處理廠想要做好節能降耗工作,需要從工藝、設備、管理以及能源等方面著手,多措并舉,在保證水質達標的前提下,降低能源的消耗,實現節能的目標。
以2005—2015年海南省初始數據為依據,計算海南省旅游經濟評價指數、生態環境評價指數、兩系統的綜合評價指數T、耦合度C及耦合協調度D。參照學術界的通用標準,劃分耦合協調度等級(見表2)。
GPS數據采樣頻率為1Hz,位置和速度噪聲均方差分別設置為1m和0.1m/s。為了模擬MEMS慣性器件,設置其采樣頻率為100Hz,陀螺儀的固定零偏值為0.1(°)/s,角度隨機游走系數設置為0.15(°)/h, 而加速度計零偏值設置為1mg, 速度隨機游走系數為0.1(m/s)/h。
將上述方程按采樣間隔T進行離散化,可得濾波模型為:
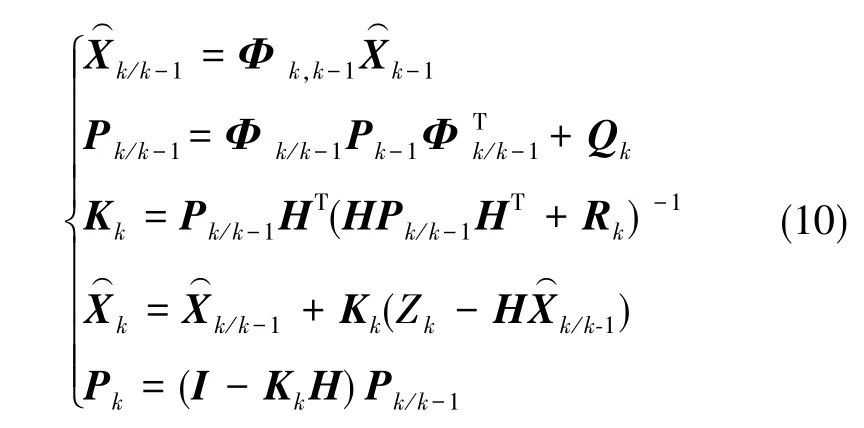
其中, Φk,k-1=I+F(t)T, I為單位矩陣。,分別是系統噪聲和量測噪聲序列的方差陣。
2 仿真分析
設置載體的初始位置為東經121.44916209°,北緯31.03375065°,高程為25m,初始姿態角都為0°。從第0s開始,設定運動狀態經過以下幾個階段:
墾區集團化、農場企業化改革進一步深化。16個整建制轉為省級農墾集團的墾區加大直屬企業和資源資產整合重組力度,共組建二級公司700余家,以資本為紐帶的母子公司管理體制和現代企業制度更加完善。全國農墾有450多家國有農場基本完成公司化改造。國有農場歸屬市縣管理的墾區積極爭取地方政府支持,努力整合區域內各類國有資源資產,壯大國有農業經濟實力,共組建區域集團公司55家、專業化農業產業公司202家,比上年末分別增加23家、95家。
1)0s~10s, 靜止。
式中,RM為子午圈曲率半徑,RN為卯酉圈曲率半徑,L、λ、h分別為載體位置的經度、緯度、高程。 β、 β1和 β2來自于正常重力公式[9]:
3)20s~30s,勻速直線運動。航向為正北方向,速度大小為10m/s。
4)30s~ 48s, 勻速角運動。 角速度為 5(°)/s,航向從正北(0°)變為正西(270°)。
5)48s~58s,勻速直線運動。航向為正西方向(270°), 速度為 10m/s。
6)58s~88s, 勻速角運動。 角速度為 15(°)/s,航向從正西(270°)變為正北(0°)。
7)88s~138s,勻速直線運動。航向為正北方向(0°), 速度為 10m/s。
8)138s~158s,勻減速直線運動。加速度為-0.5m/s2,航向為正北方向,速度從10m/s減為0m/s。
相應的軌跡圖如圖1所示。
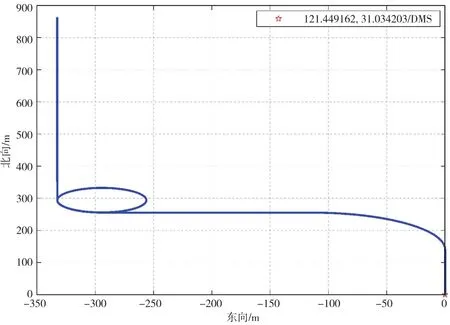
圖1 軌跡仿真圖Fig.1 Trajectory simulation
利用軌跡生成程序生成軌跡位置、速度和姿態的真值以及無誤差的慣性測量單元輸出值,在速度位置真值上加上Gauss噪聲即為GPS輸出的位置、速度值,在無誤差慣性測量單元輸出值上加固定零偏、隨機游走即可模擬真實慣性器件的輸出值。
(3)離散化的濾波模型
載體運動20s后進入勻速直線運動狀態時進行粗對準,所以對準過程中的0s~138s對應著載體運動狀態中的20s~158s。利用GPS數據速度信息計算得到初始航向角為4.5732°,利用加速度計信息獲得初始的俯仰角和橫滾角為 0.1078°和0.1325°。之后進入Kalman濾波的精對準過程,精對準過程的航向角與軌跡航向角真值誤差仿真結果如圖2、圖3所示。
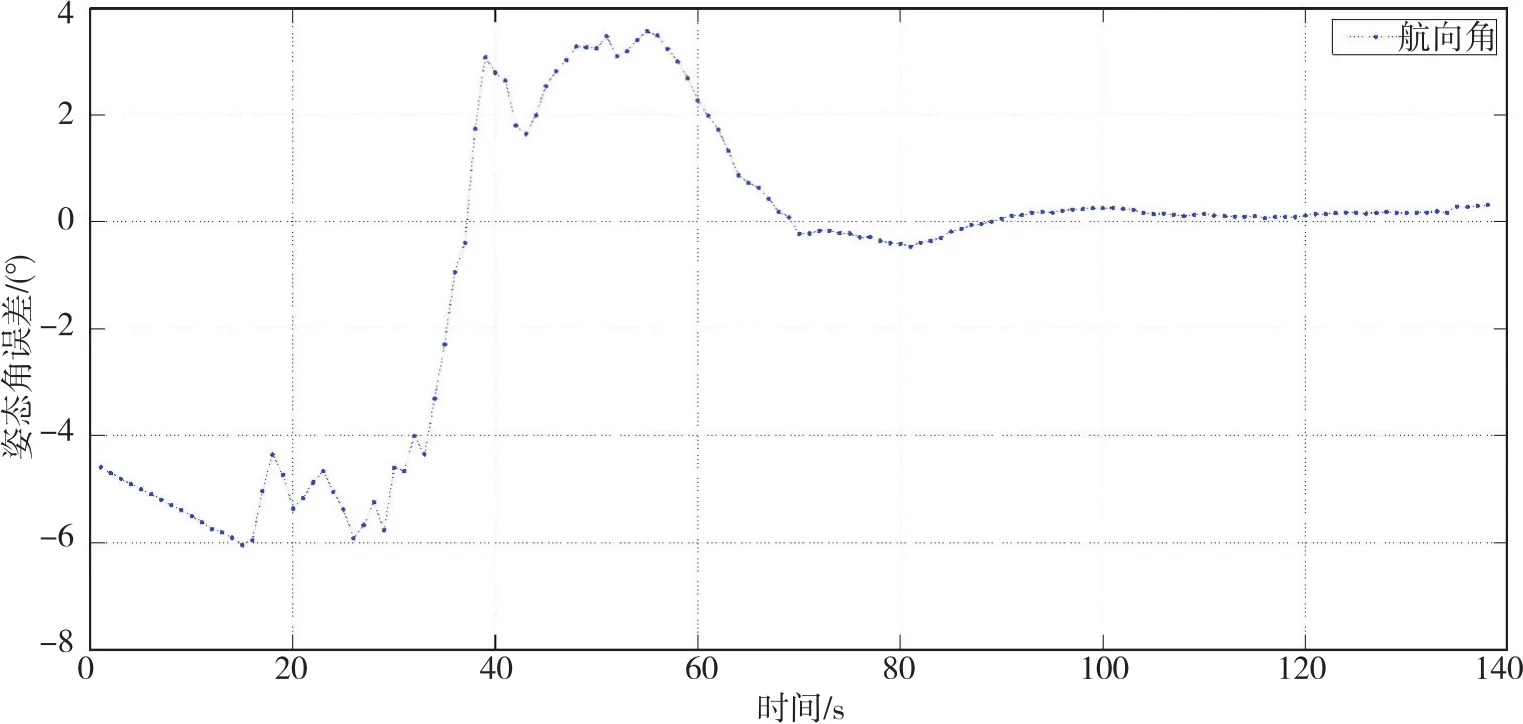
圖2 航向角誤差Fig.2 Error of azimuth
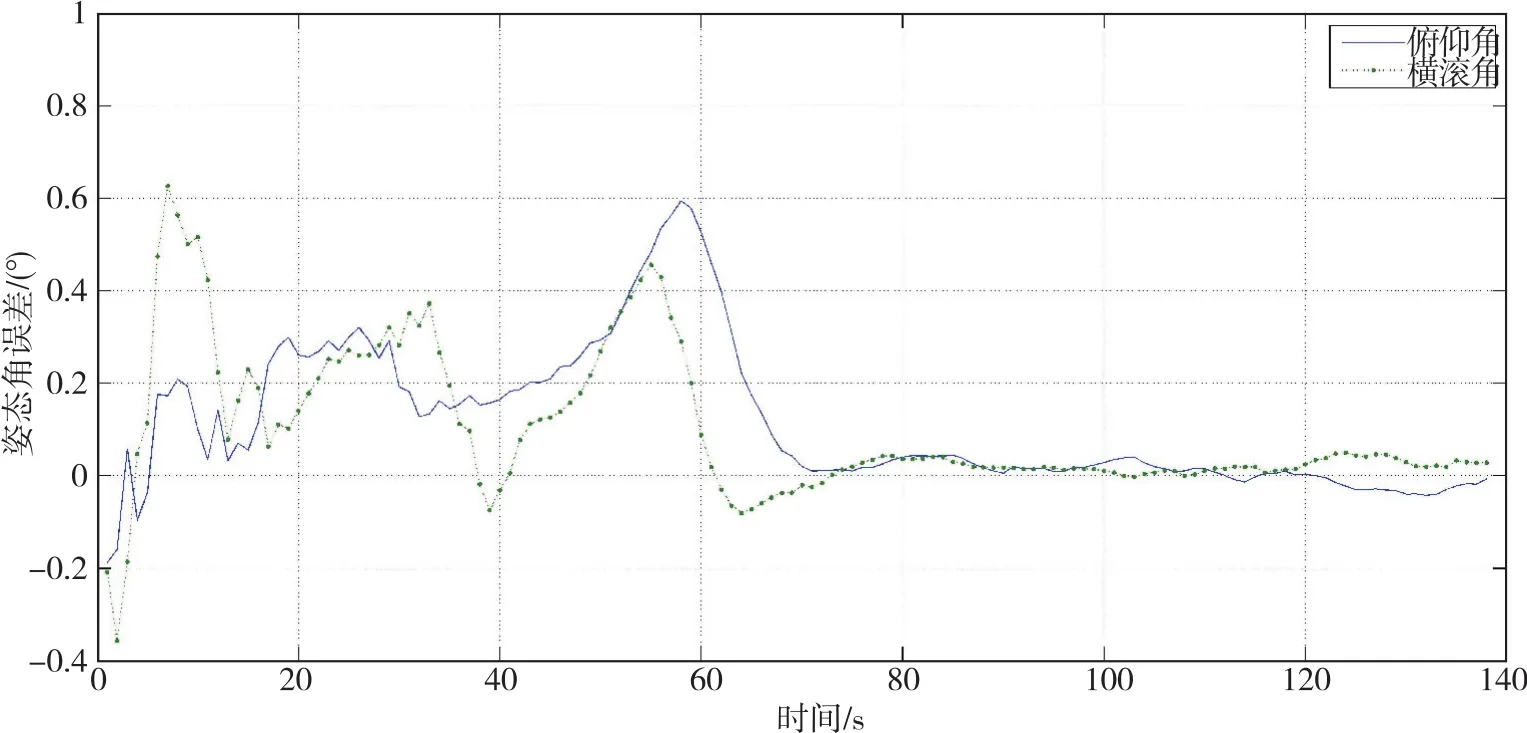
圖3 俯仰角、橫滾角誤差Fig.3 Errors of pitch and roll angle
相應的陀螺零位誤差估計如圖4所示。
(2)工程前后水位變化。裁彎工程實施以后,南夾江比降增大,分流量也增大,裁彎出口段受到長江干流來水的頂托,在82 400 m3/s流量下水位壅高幅度達0.06 m,其余河段水位均有所下降,下降幅度在0.01~0.05 m之間。
從圖4可以看出,80s后姿態角的誤差趨于穩定,且隨后俯仰角和橫滾角誤差最大值不超過300″,而航向角誤差最大值不超過25′,陀螺零位誤差在80s后也趨近于給定的0.1(°)/s。經計算,80s后姿態角的均方誤差如表1所示。
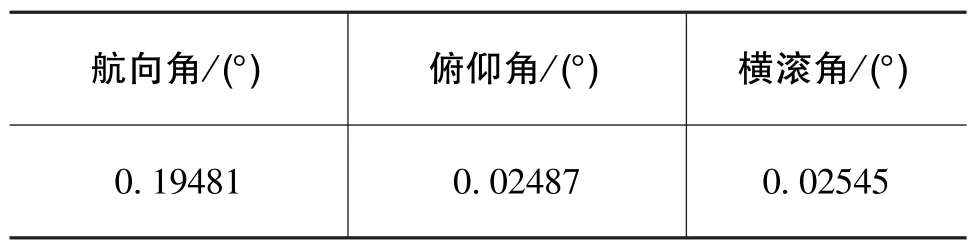
表1 80s后姿態角均方誤差Table 1 Mean square error of attitude angle after 80s
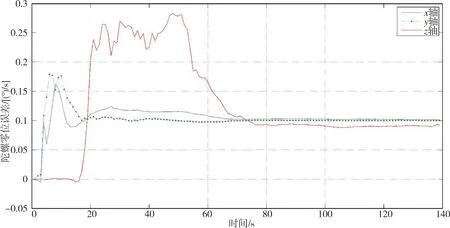
圖4 陀螺零位誤差估計Fig.4 Estimation of gyro bias
由表1可知,該方案能對陀螺零位誤差進行較好的估計,且在較短時間內完成對MEMS慣性系統的比較精確的對準。
3 車載試驗
為了進一步驗證本文提出對準算法的可行性與有效性,進行了一次車載試驗,試驗使用挪威Sensornor公司生產的MEMS慣性器件STIM300和單天線GPS組成對準系統。采用北斗星通公司生產的高精度光纖組合導航系統INS300作為對比,其在雙天線(1m基線)組合動態情況下的航向角精度為0.2°,俯仰角和橫滾角精度為0.05°;在后處理情況下航向精度為0.05°,俯仰角和橫滾角精度為0.015°,精度較高,可以作為試驗的真值說明問題。將STIM300和INS300主體的載體系對準后固聯在一起,INS300的兩個天線架設在車頂平行于車輛正前方,對準所需的單天線與其3點共線。車輛進入近似勻速直線行駛狀態后進行粗對準,粗對準完成后進入濾波精對準階段。試驗從粗對準開始到精對準結束,行駛軌跡如圖5所示。

圖5 車載試驗對準過程軌跡圖Fig.5 Trajectory of vehicle during the aligning stage
對準過程中姿態角對比如圖6~圖8所示。
從圖6~圖8可以看出,粗對準進入精對準狀態時,由于初始姿態誤差的存在,加上對濾波狀態的估計未收斂,SINS解算得到的姿態角偏差較大,但300s后解算得到姿態角與真值基本符合。相應的姿態角誤差(航向角在超過360°時造成的突變誤差已經經過處理)如圖9、圖10所示。
經計算,300s后姿態角的均方誤差如表2所示。

表2 300s后姿態角均方誤差Table 2 Mean square error of attitude angle after 300s
對陀螺儀的零位誤差估計如圖11所示。
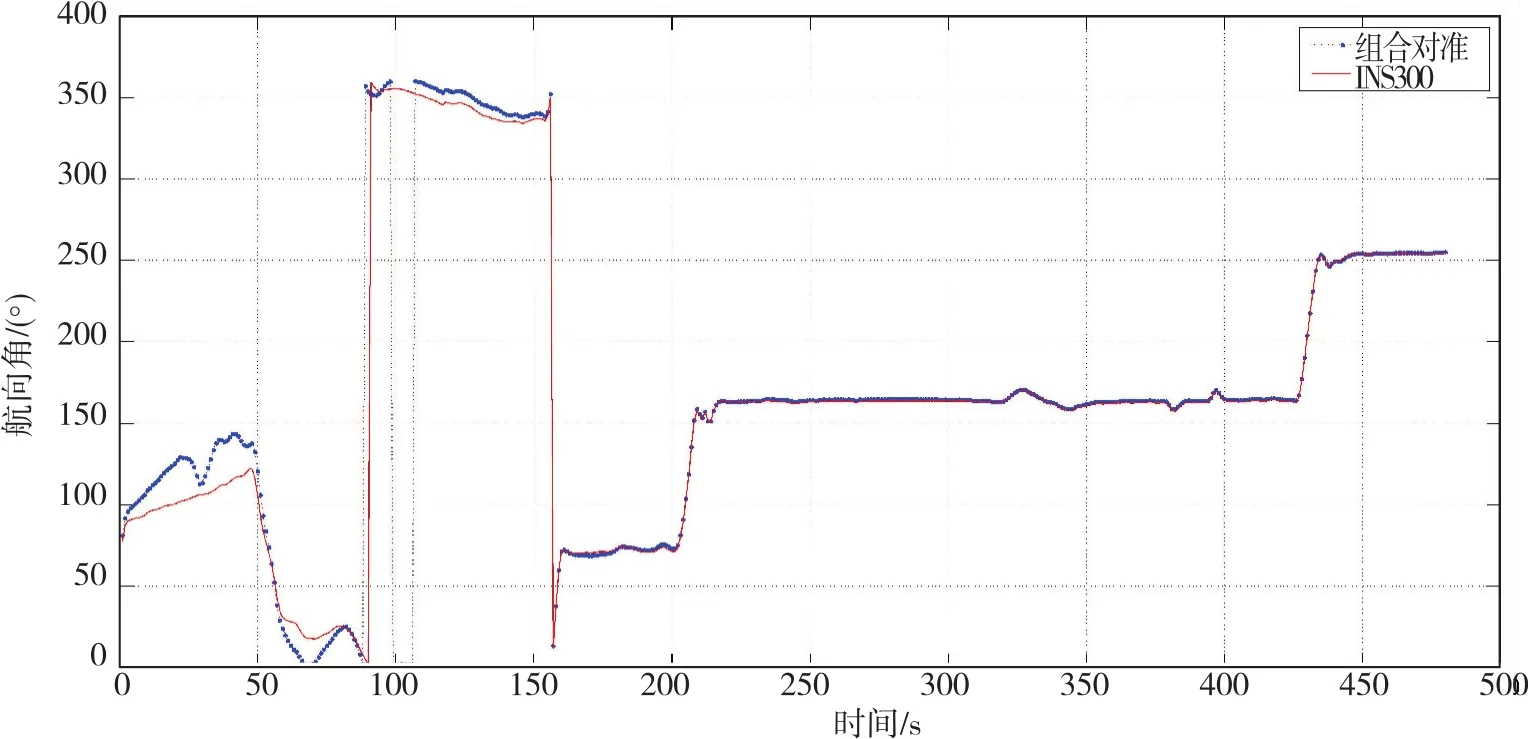
圖6 航向角對比Fig.6 Comparison of azimuth
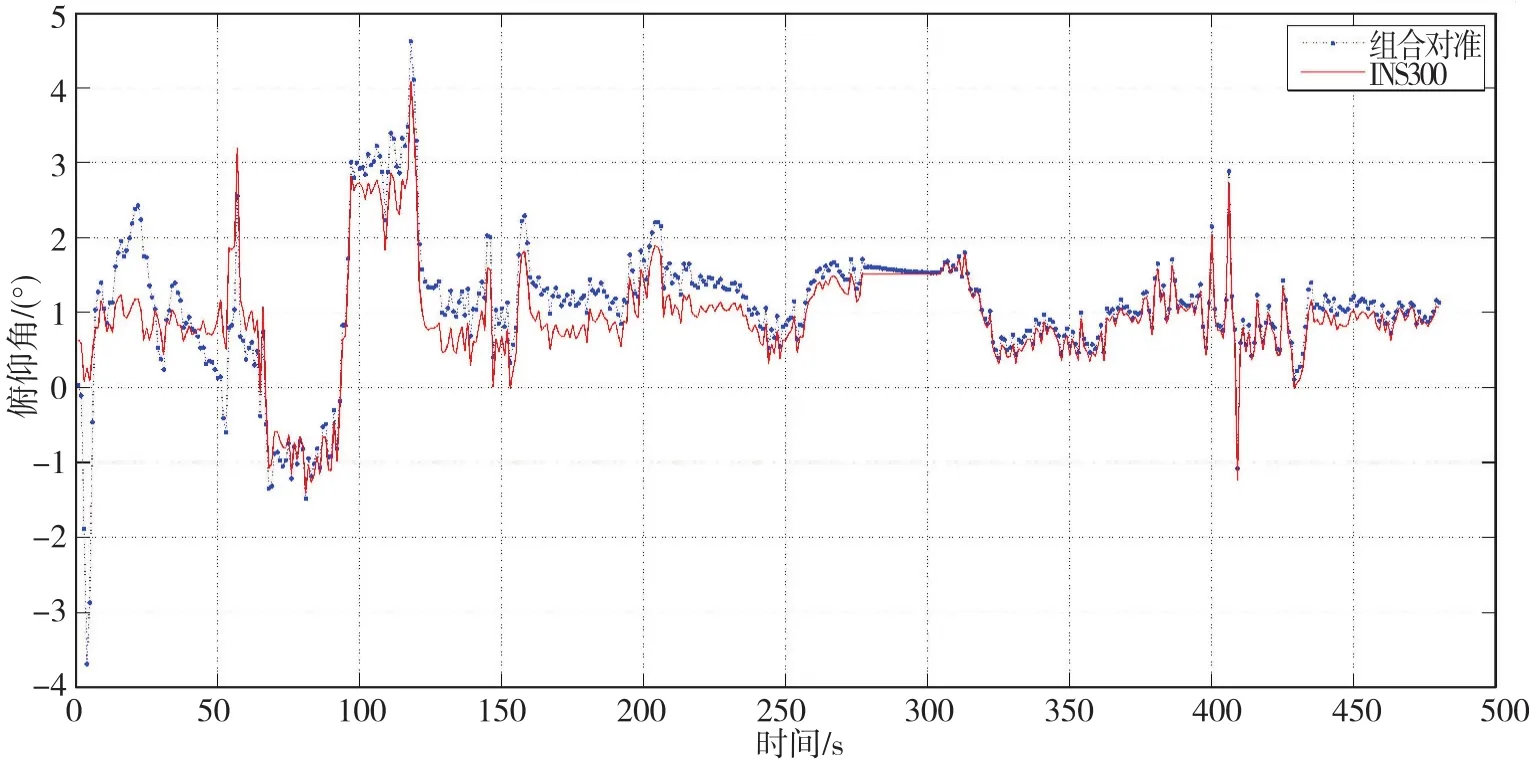
圖7 俯仰角對比Fig.7 Comparison of pitch angle
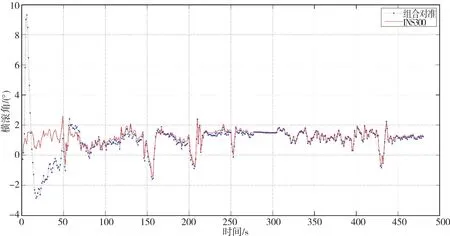
圖8 橫滾角對比Fig.8 Comparison of roll angle
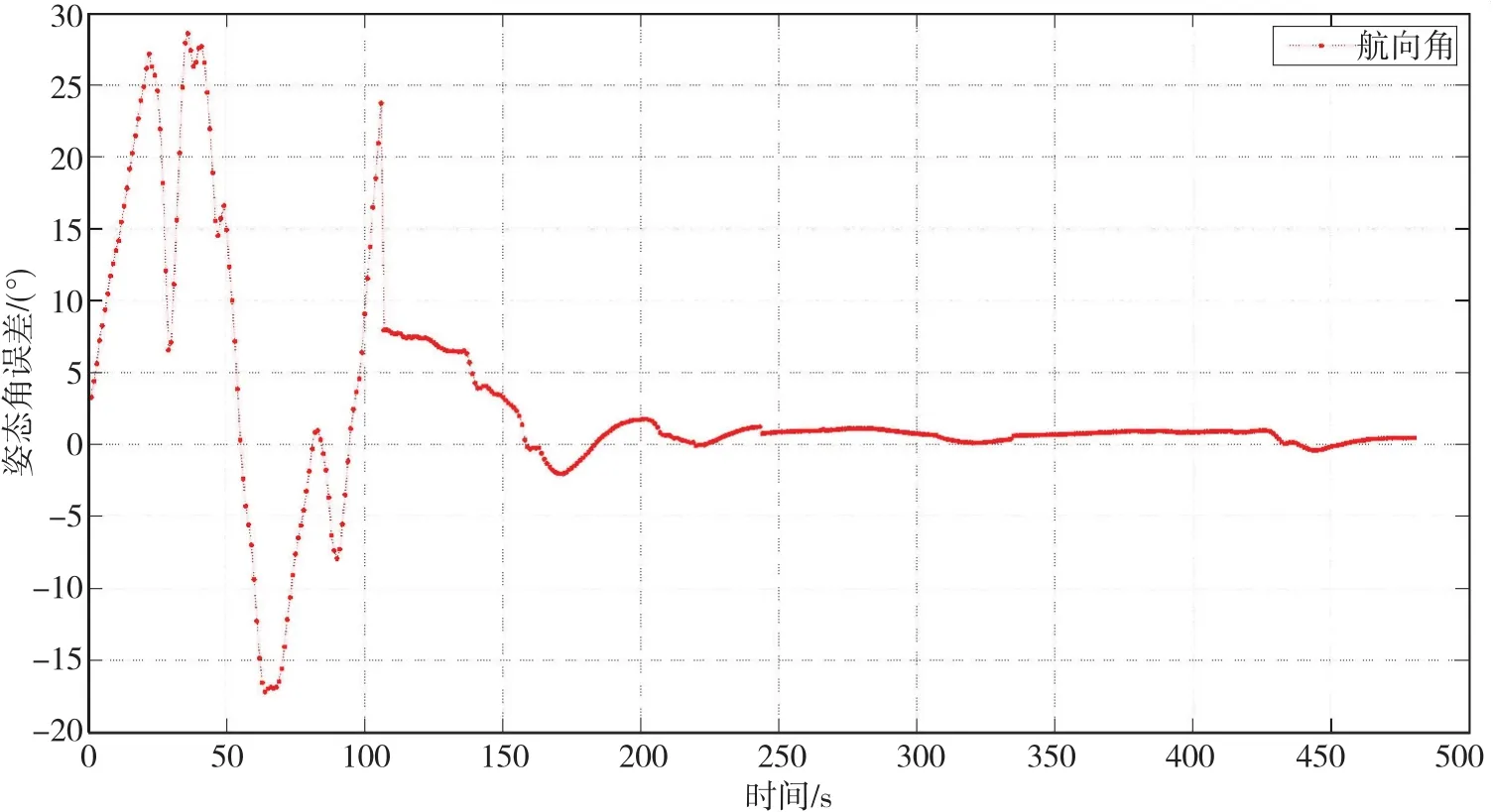
圖9 航向角誤差Fig.9 Error of azimuth
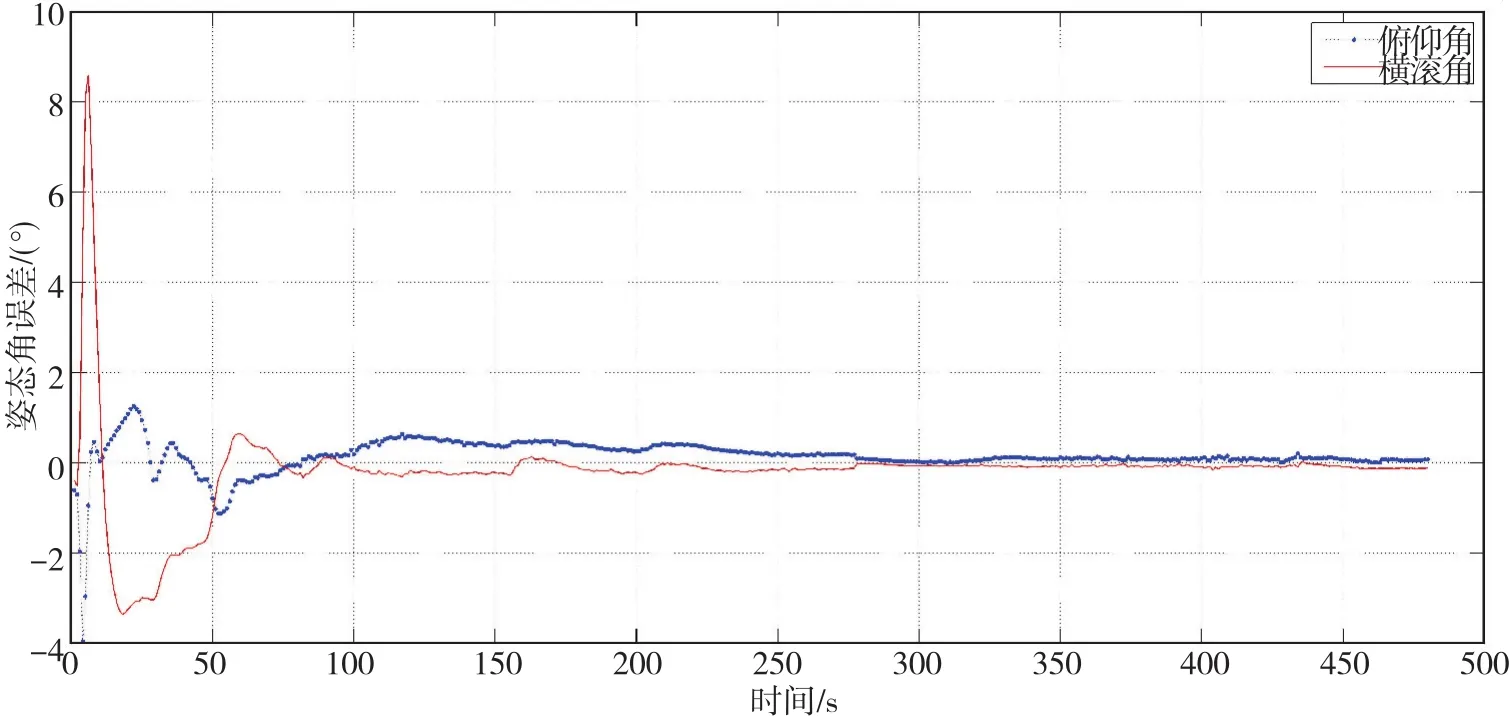
圖10 俯仰角、橫滾角誤差Fig.10 Errors of pitch and roll angle
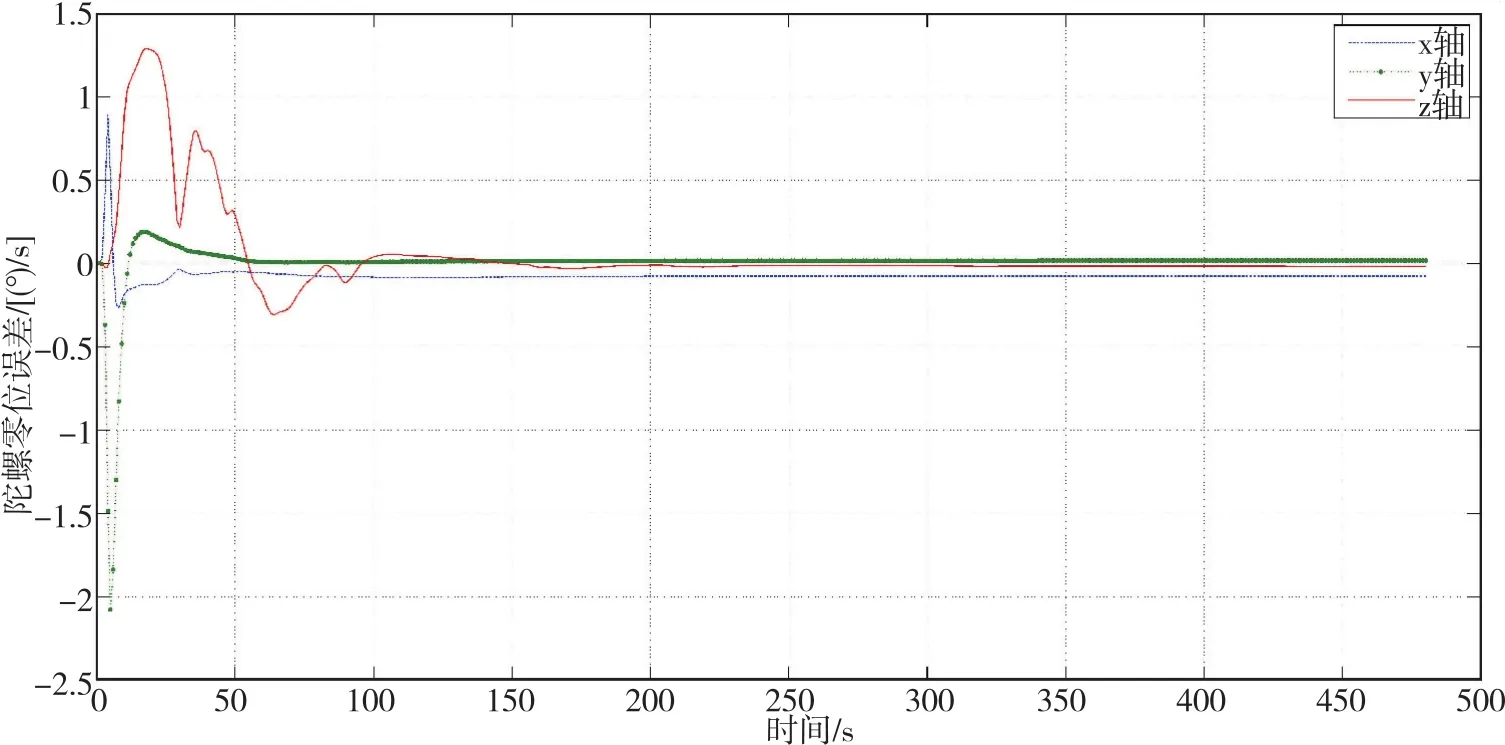
圖11 陀螺零位誤差估計Fig.11 Estimation of gyro bias
可以看出在試驗的動態情況下,GPS單天線測姿和由加速度計獲得的粗略姿態信息可以作為精對準的基礎,且精對準濾波過程在300s內即可收斂到一定精度,航向角均方誤差在0.5°以內,俯仰角和橫滾角均方誤差在0.1°以內。
互質線陣是在均勻線陣的基礎上發展而來,陣元間距的增加,互耦效應得到了顯著降低.根據陣列信號處理的知識,當陣元間距大于半波長時,DOA估計會出現“偽峰”現象,并且“偽峰”的位置與陣元間距有關,若兩個均勻稀疏陣列陣元間距為半波長的整數倍,且“互質”,就能保證DOA估計空間譜中“真峰”位置重疊,而“偽峰”被去除掉.現給出互質陣的典型形式如圖2所示,設子陣1含有N個陣元,陣元間距為Md;子陣2含有2M個陣元,陣元間距為Nd,兩個子陣處于同一直線上,且第一個陣元重合,故整個陣列含有2M+N-1個陣元.
4 結論
本文提出了將單天線測姿方法運用到基于MEMS器件的SINS初始對準的組合對準算法。與傳統對準方法相比,成本低、體積小、安裝便利、算法也比較簡單,所需的動態環境在實際條件下也很容易達到。經過車載試驗驗證,在高于3m/s的勻速直線運動或近似勻速直線的初始條件下進行粗對準和后續的精對準濾波,對準完成后航向角均方誤差在0.5°以內,俯仰角和橫滾角均方誤差在0.1°以內。結果表明,本方案有一定的實際應用價值和可行性,可以滿足中低精度的慣性導航系統的初始對準要求。
[1]嚴恭敏,白亮,翁浚,等.基于頻域分離算子的SINS抗晃動干擾初始對準算法[J].宇航學報,2011,32(7): 1486-1490.YAN Gong-min, BAI Liang, WENG Jun, et al.SINS anti-rocking disturbance initial alignment based on frequency domain isolation operator[J].Journal of Astronautics, 2011, 32(7): 1486-1490.
[2]嚴恭敏,秦永元.捷聯慣導系統靜基座初始對準精度分析及仿真[J]. 計算機仿真, 2006, 23(10): 36-40.YAN Gong-min,QIN Yong-yuan.Initial alignment accuracy analysis and simulation of strapdown inertial navigation system on a stationary base[J].Computer Simulation, 2006, 23(10): 36-40.
[3]Chattaraj S, Mukherjee A, Chaudhuri S K.Transfer alignment problem: algorithms and design issues[J].Gyroscopy and Navigation, 2013, 4(3): 130-146.
[4]Kornfeld R P,John H R, Deyst J J.Single-antenna GPS-based aircraft attitude determination[J].Navigation, 1998,45(1): 51-60.
[5]盧鴻謙,賀杰,黃顯林,等.單天線GPS/加速度計組合測姿方法研究[J].哈爾濱工程大學學報,2006,27(6): 854-857.LU Hong-qian, HE Jie, HUANG Xian-lin, et al.Study of single-antenna GPS/accelerometer integrated attitude determination method[J].Journal of Harbin Engineering University, 2006, 27(6): 854-857.
[6]Chen W,Yu C,Cai M M,et al.Single-antenna attitude determination using GNSS for low-dynamic carrier[C].China Satellite Navigation Conference,2017.
[7]馬福成,劉保良,滕擁軍,等.基于加速度計的載體姿態測量模型設計與實現[J].現代電子技術,2008,31(13): 61-63.MA Fu-cheng, LIU Bao-liang, TENG Yong-jun, et al.Design and realization of accelerometers-based carrier attitude determination model[J].Modern Electronics Technique, 2008, 31(13): 61-63.
[8]秦永元.慣性導航(第二版)[M].北京: 科學出版社,2014.QIN Yong-yuan.Initial navigation (2nd)[M].Beijing:Science Press,2014.
[9]楊亞斌,韓革命.區域重力調查中正常重力公式對比[J]. 物探與化探, 2012, 36 (1): 45-47+53.YANG Ya-bin,HAN Ge-ming.A comparision study of normal gravity formalae in regional gravitational survey[J].Geophysical and Geochemical Exploration, 2012, 36(1): 45-47+53.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32