能量均衡的低功耗有損網絡路由協議
2018-06-20 06:17:04何王吉馬皛源唐瑋圣
計算機應用 2018年4期
何王吉,馬皛源,李 鑫,唐瑋圣
(1.中國科學院 上海高等研究院,上海 201210; 2.中國科學院大學,北京 100049;3.上海科技大學 信息科學與技術學院,上海 201210)(*通信作者電子郵箱maxy@sari.ac.cn)
0 引言
近年來,低功耗有損網絡(Low-power and Lossy Network,LLN)在醫療健康、環境監測、智能家居、智能電網[1-4]等領域均有廣泛的應用。由于傳感器節點的處理能力、存儲空間和能量都十分有限,且節點間通過不穩定的無線鏈路相連,LLN具有拓撲不穩定、丟包率較高的特點。在LLN實際的應用中,由于傳感器節點數量眾多以及環境條件的限制,不可能頻繁更換節點的電池,需要盡力延長網絡的生存時間,即網絡中最先死亡的節點的生存時間。
2008年,國際互聯網工程任務組成立了ROLL(Routing Over Low-power and Lossy network)工作組,對低功耗有損網絡制定了IPv6路由協議標準低功耗有損網絡路由協議(Routing Protocol for Low-power and lossy network, RPL)[5]。RPL是一種距離矢量路由協議,通過使用目標函數(Objective Function,OF)和路由度量指導節點選擇一條到根節點的最佳路徑,來構造導向目的地的有向無環圖(Destination Oriented Directed Acyclic Graph, DODAG)。路由協議需要周期性地廣播拓撲信息,以維護網絡拓撲。為了減少控制包數量,RPL采用“Trickle”定時器機制維護網絡拓撲[6],它會根據網絡狀況動態地調整控制包發送頻率。當網絡穩定時,控制包間隔會成倍遞增,造成網絡后期控制包更新不及時。
官方已制定了兩種目標函數(Objective Function, OF):零目標函數(Objective Function Zero, OF0)[7]與帶有遲滯性的最小深度目標函數(Minimum Rank with Hysteresis Objective Function, MRHOF)[8]。OF0以跳數作為路由度量,MRHOF以期望傳輸次數(Expected Transmission Count, ETX)[9]作為路由度量。這些路由度量都僅考慮了單一方面,會造成部分節點數據量增多,提前耗盡能量。
目前,已有一些研究對RPL性能進行了分析比較。文獻[10]中顯示,在數據采集網絡中,相對于CTP(Collection Tree Protocol),RPL具有更好的收包率與低功耗特性。文獻[11]對比分析了RPL與LOADng(Lightweight On-demand Ad hoc Distance-vector routing protocol-next generation)協議性能,實驗顯示,相對于LOADng協議,RPL的時延更小,控制包開銷與所需存儲空間也更少。
關于RPL優化的研究中,文獻[12]中提出了一種最小化節點到root時延的路由度量,能有效降低RPL的端到端時延;文獻[13]中針對突發事件中的大數據流所導致的擁塞問題,提出了一種復合多種路由度量的多路徑負載均衡路由算法。根據不同鏈路分配的權值,將連續的大流量數據分發給不同的鏈路進行傳輸,緩解了網絡擁塞,并且能夠均衡網絡負載。
在對RPL進行能量優化的研究中,文獻[14]中提出了一種期望壽命(Expected Life Time,ELT)路由度量用于估算網絡中瓶頸節點的生存時間,以此構建網絡拓撲,并依據最大最小(Max-Min)原則選擇父節點。與RPL相比,改進后ELT-RPL實現了能量均衡與網絡壽命的延長,但在收包率上性能下降,因為該協議增加了控制包的數量造成包的碰撞概率增加。文獻[15]通過節點的能量分級和調節通信半徑的方法,改進了RPL中的目標函數,并通過實驗結果說明改進后的算法能均衡網絡負載,延長整個網絡的生命周期,但會增加跳數,并且存在網絡抖動現象。在文獻[16]中,基于簇父集協作通信的RPL(Cluster parent set based RPL, CRPL)中沒有均衡節點能耗與最大化網絡生存時間的問題,提出了一種高效的CRPL(High-Efficient CEPL, HE-CEPL)。選擇簇父節點時,同時考慮通信可靠性與節點可用能量,并引入期望壽命ELT進行最優簇父集選擇。文獻[17]將鏈路質量與節點消耗能量相結合,提出了一種能量感知的RPL,與RPL相比,延長了網絡生存壽命。
上述工作雖然延長了一定的網絡生存時間,但都沒有解決網絡后期控制包發送頻率降低所造成的父節點狀態信息更新不及時的問題,該問題的存在會使節點作出錯誤的路由決策,加速瓶頸節點的死亡。
本文在RPL的基礎上,綜合考慮鏈路可靠性和節點生存時間,設計了一種能量均衡的EB-RPL(Energy Balancing-RPL)。本文的工作主要有以下兩方面:
1)提出了一種復合期望傳輸次數和節點剩余能量的路由度量EB-ETX(Energy Balancing-Expected Transmission Count),前期優先選擇可靠性高的鏈路,后期節點剩余能量減少,通過機制設計使其在路由度量中的比重升高,節點能自適應地調整網絡拓撲,優先選擇能量更多的節點為父節點。
2)設計了一種基于能量消耗速率的父節點電量估算算法,以解決RPL中“Trickle”定時器機制所導致的父節點狀態信息更新不及時的問題。
1 問題描述
在RPL中,僅選定一種節點或鏈路屬性作為路由度量,并根據該度量建立DODAG,這會使部分節點能耗增加,提前死亡。例如,在圖1所示的拓撲中,采用ETX作為路由度量,q反映鏈路質量,其數值等于鏈路的期望傳輸次數,數值越小表示其路徑的傳輸質量越高;以節點距離根節點(root)的跳數表征節點的Rank等級,Rank越小表示節點距離root更近。為了避免產生路由環路,節點只能選擇Rank比自己小的節點作為父節點。以節點5為例,其到兩個父節點2、3的路由開銷(Path Cost)分別為5和3,因此節點5的最佳父節點為節點3。顯然在圖1的DODAG中,節點3為瓶頸節點,由于子樹中節點眾多,其能耗顯著高于同級節點,會成為網絡中最先死亡的節點。
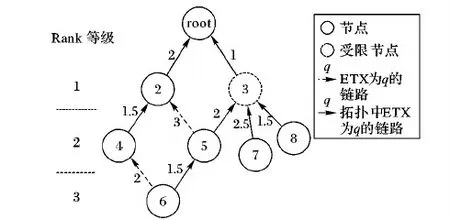
圖1 以ETX為路由度量構造的DODAG
因此,要延長網絡生存時間就要延長網絡中瓶頸節點的生存時間,并實現網絡中同級節點間的能量均衡,即相同Rank值的節點間的能量均衡,例如圖1中的節點2與節點3。網絡中不同位置的節點發揮著不同的作用,因此不能要求在root附近的關鍵節點與處于拓撲樹底端的葉子節點之間能量均衡,因為前者的能耗必然是顯著高于后者的。此外,在實現能量均衡的同時要保證一定的鏈路可靠性,以滿足實際應用需求。
為了解決上述問題,本文提出了能量均衡的EB-RPL。在網絡初期能量充足時,節點會優先選擇鏈路質量最好的父節點構成最優路徑,以保證網絡的可靠傳輸;根據本文的機制設計,隨著節點能量的降低,節點剩余能量在路由開銷中的比重會逐漸增大,當剩余能量下降到一定程度時,節點會優先選擇剩余能量最多的節點為最佳父節點,以避免鏈路質量最優的父節點成為網絡中的瓶頸節點,最先耗盡能量。
2 能量均衡的RPL
2.1 復合路由度量EB-ETX
路由度量是指選擇父節點時用于計算路由開銷時的鏈路或節點特征,常見的節點性質有:跳數、剩余能量,鏈路性質有:吞吐量、時延、期望傳輸次數。
為了構造能兼顧鏈路質量和節點剩余能量的路由度量,在計算路由開銷時,需要量化鏈路質量和節點的剩余能量(Residual Energy, RE),因此,本文提出以下公式來分別計算路由度量和路由開銷:
EB-ETXN→P=a·ETXN→P+b·RERN
(1)
PathCostN=PathCostP→root+EB-ETXN→P
(2)
其中:ETXN→P為期望傳輸次數,表示節點N與父節點P之間的鏈路質量;剩余能量率(Residual Energy Rate, RER)是反映節點能量的度量值,RERN表示節點N能量的剩余狀況;a與b分別為ETX與RER的權重系數;PathCostP→root則表示父節點到root的路由開銷。通過式(1)可求得從節點N到父節點P的EB-ETX值,其取決于節點之間的鏈路質量和節點N的剩余能量情況,并且可以根據不同的應用需求來調節a與b的取值,當a大于b時,表示鏈路質量在路由度量中的比重更大,適用于保證網絡高可靠性的應用;反之,則用于需要延長網絡生存時間的應用;當兩者相等時,適用于網絡生存時間和可靠性對其有著同等重要性的應用。在本文的仿真實驗中,為了在保證網絡可靠性的同時延長網絡生存時間,設定a為0.2,b為3。
式(2)表明了節點N到root的路由開銷由其到父節點的路由度量值與父節點到root的路由開銷組成。最終,節點到root的路由開銷由父節點到root的路由開銷、節點到父節點的鏈路質量和節點剩余能量狀況三部分組成。節點將選擇路由開銷最小的節點作為自己的最優父節點。
根據RFC 6551[18]中所給出的描述,鏈路的ETX值是指包從鏈路一端成功發送到另一端所需要傳輸的次數,它反映了雙向鏈路質量,ETX越小說明鏈路越可靠。ETX的計算需要涉及到鏈路的雙向包接收率(包接收率為接收節點收包數與發送節點發包數之比)。ETX計算公式如下:

(3)
其中:PN→P表示節點N的包接收率,即N收到的數據包數量占父節點發包總數的比率;PP→N表示父節點的包接收率。
為了實現隨著節點剩余能量的減少,自適應地增加剩余能量率在路由開銷中所占比重,本文設計了如下反比例公式:
RERN=E0/REN
(4)
其中:REN=E0-CEN;CEN表示節點N消耗的能量;E0表示節點初始的能量。因此節點的剩余能量率為節點初始能量與剩余能量的比值。
根據文獻[19],節點狀態主要分為cpu、lpm、listen和transmit,分別表示節點處于正常運行、低功耗、監聽和傳輸狀態。根據不同狀態的功率和運行時間,可以統計節點的能量消耗情況:
(5)
P=U·I
(6)
其中:Pi表示在上述四種狀態下節點對應的功率值;ti表示對應狀態下的運行時間。
設定電壓U為3 V,cpu、lpm、listen、transmit狀態下對應的電流I分別為1.8 mA、0.054 mA、17.7 mA、20 mA,代入式(6)即可求得各個狀態對應的功率值。同時,利用Contiki操作系統[20]中的Energest函數,可以得到節點在各個狀態下的運行時間。
圖2所展示的是RER隨著節點電量消耗CE/E0的變化趨勢:在電池電量較充足時(消耗電量低于50%),RER值并沒有明顯地增大,電量消耗從0%增至50%,RER值僅增加了1;隨著節點能量進一步降低,特別是在消耗80%的能量以后,RER值則會顯著增大。通過上述機制設計,使得節點在網絡初期優先選擇可靠鏈路,保證拓撲的穩定性和網絡傳輸的可靠性;而在后期網絡內節點能量受限時,優先選擇剩余能量最多的節點構成最優路徑,以延長網絡中瓶頸節點的生存時間。

圖2 RER值隨節點電量消耗的趨勢
以圖1中的網絡拓撲為例,當采用EB-RPL時,網絡初期,由于節點3提供更好的鏈路質量,節點5、7、8都選擇節點3作為最佳父節點;隨著網絡中節點剩余能量降低,節點5和6又分別選擇剩余能量更多的節點2和4作為自己的最佳父節點,如圖3所示。這種自適應調整拓撲的策略可以延長網絡中瓶頸節點的生存時間,并實現節點間能量均衡,從而延長網絡生存時間。

圖3 使用EB-RPL時的網絡拓撲變化
2.2 父節點電量估算策略
當采用上述復合路由度量時,節點會定期廣播包含自身信息的控制包,用于子節點計算、更新路由開銷。由于LLN的低功耗特性,RPL采取了“Trickle”定時器機制管理控制包發送,它會根據網絡狀況自適應地調整控制包發送頻率。如果網絡穩定(沒有節點加入或死亡等),下一次發送間隔I會取當前間隔的2倍,直至I等于I_max。RPL中默認的I_max為220s,即在網絡后期最長的控制包間隔為17 min。這會導致節點無法正確獲知父節點的狀態變化,例如父節點實際能量已經接近耗盡,但子節點按照前一次收到的控制包中的狀態值來計算路由開銷,仍選擇該節點為最佳父節點。如果減小控制包的發包間隔又會導致網絡中控制包數量增多,增大包的碰撞概率和網絡能耗。
對此,本文提出了一種基于能量消耗速率的節點電量估算策略,該策略在不增加額外控制包開銷的同時,可以計算父節點剩余能量情況。
在電量估算策略中,節點會周期性地計算自己的剩余能量,并記錄下當前時間t1與對應的REt1;在下一時刻t2時,若計算得到的REt2≠REt1,便根據式(7)計算節點的能量消耗速率(Energy Consumption Rate, ECR)。
(7)
此外,利用EWMA(Exponentially Weighted Moving- Average)函數可以得到更平穩的ECR值:
ECRfinal=0.4ECRold+0.6ECRnew
(8)
式(8)表明最終的能量消耗速率ECRfinal是對上一次的ECRold與當前的ECRnew進行移動平均后得到的。因此,節點發送的控制包中將包含自身的EB-ETX、RE以及ECR值。
子節點收到控制包后,會在鄰居表中記錄父節點的狀態信息和收包時間,此后若等待時間Δt大于門限值t0(全網統一的等待門限,仿真實驗中設為50 s)時,仍未收到對應父節點的新的控制消息,則根據父節點上一次的剩余能量和能量消耗速率估算當前的剩余能量:

(9)
其中:REinitial為鄰居表中存儲的最新父節點剩余能量值;REest是對父節點當前剩余能量的估值;REest_last表示前一次計算的父節點剩余能量估值。式(9)的含義是,當第一次估算父節點剩余能量時,參照REinitial計算估值;此后,每次參照上次的估值REest_last估算當前的父節點剩余能量。
將得到的REest代入式(4)計算剩余能量率增量:
(10)
利用ΔRER即可更新當前父節點到root的路由開銷PathCostparent_est,將其代入式(2)便可得到當前節點到root的路由開銷:
(11)
其中:PathCostparent是最近一次控制包中包含的父節點到root的路由開銷。在每完成一輪計算后,子節點會在鄰居表中記錄當前時間、對應的父節點剩余能量估值REest與RER增量ΔRER,并按照上述步驟重新開始新一輪計算。當等待時間未達到門限值t0時,節點根據鄰居表中存儲的ΔRER仍按照式(11)計算路由開銷。
同時,為了避免由于長時間未收到控制包,出現對父節點能量估值不準確的情況,若子節點超過10 min未收到新的控制消息或REest≤REinitial/3,會向父節點發送控制包請求信息,父節點收到后則回復新的控制包。
通過上述父節點電量估算策略,可以在基本不增加額外的控制包的同時,實時更新父節點到root的路由開銷,使節點進行更正確的最佳父節點選擇。
3 性能評估
本章通過仿真實驗分別對父節點電量估算策略的正確性與EB-RPL性能進行了分析與驗證。
首先,為了驗證父節點電量估算策略的準確性,本文計算了電量估值與實際值間誤差的均值與方差。
然后,本文對EB-RPL與RPL分別作了仿真分析,并對比了兩者的協議性能,以驗證EB-RPL能實現能量均衡并延長網絡生存時間,其中RPL使用ETX為路由度量。本文使用的仿真平臺是Contiki 2.7操作系統,仿真工具是Cooja仿真器。
本文主要采用下列三種性能指標進行協議的對比分析:
1)網絡生存時間。以網絡中第一個死亡的節點生存時間作為網絡的生存時間,為模擬真實場景中的通信系統,當節點剩余能量僅為初始能量的10%時,視為該節點死亡。
2)能量均衡。以Rank值為1的節點功率的標準差來表征網絡中的能量均衡性能,數值越小說明節點間能量越均衡。
3)收包率。定義為根節點成功收包數與網絡中發包總數的比率,收包率越高說明網絡越可靠。
3.1 仿真環境
本文的仿真場景由21個Exp5438節點組成,其中節點1為根節點(通常使用電源供電,默認其能量充足,子節點始終視其為滿電狀態),其余均為傳感器節點,如圖4所示。
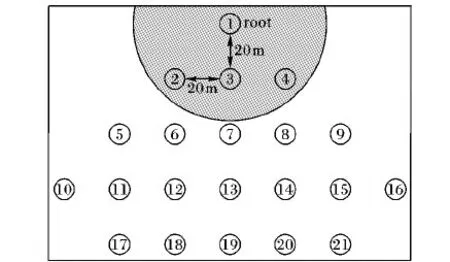
圖4 仿真場景
為了模擬現實場景,本文的相關參數設置如表1所示。其中關于初始能量的參數設置,考慮如下:實際應用中,節點通過干電池供電,通常干電池電壓為1.5 V,電池容量約為1 200 mAh,計算可得其能量為6 500 J。為了便于在仿真平臺上進行多次重復驗證,實驗將節點的初始能量設為6.5 J。

表1 仿真環境與參數設置
3.2 父節點電量估算策略的準確性分析
為了分析驗證父節點電量估算策略的準確性,本文利用圖4中的仿真場景,設定發包間隔為5 s,路由層運行EB-RPL。根據第2章中所述,子節點會計算經過不同父節點到根節點的路由開銷,并選擇其中開銷最小的父節點為最佳父節點。以節點14為例,在圖4所示的拓撲中,節點14的子節點19、20、21在計算路由開銷時都需估算節點14的實時電量,通過記錄子節點的電量估值與對應時刻節點14的實際電量,根據式(12)可求得此次估值誤差ΔE(t):
ΔE(t)=|REest(t)-REreal(t)|
(12)
其中:REest(t)表示t時刻子節點對父節點的電量估值;REreal(t)表示t時刻該父節點的實際電量。根據上述過程,可得到網絡生存周期內不同時刻,節點19、20、21對父節點14電量估值的誤差分布情況,如圖5所示。圖5顯示節點14的相鄰子節點19、20、21對其電量估值的誤差范圍為0%~3%。

圖5 節點14的子節點電量估值誤差分布
同時,可以進一步算出節點14的子節點對其電量估值誤差的均值為0.5,方差為0.3。通過統計網絡生存周期內,所有節點的子節點對其電量估值的誤差,并計算誤差的均值與方差,最終可得到表2。由于節點1始終被視為滿電狀態,節點17~21是網絡中的葉子節點,沒有相應的子節點,故均不在表中。表2中所有節點的電量估值誤差的均值范圍為0.5%~2.8%,方差范圍為0.4~5.6,說明在網絡生存周期內,本文所提出的父節點電量估算策略均能達到較高的準確性。

表2 節點的子節點對其電量估值的誤差
3.3 網絡生存時間
在圖4所示的仿真場景中,設定發包間隔為5 s,路由層分別運行RPL與EB-RPL。在兩種協議的網絡拓撲中,節點3均為瓶頸節點,其剩余能量隨仿真時間變化如圖6所示。隨著實驗的進行,節點3的剩余能量逐漸減少,與RPL相比,EB-RPL中節點能量的消耗速率更低,并且網絡后期的下降速率變慢。最終,在RPL與EB-RPL中,網絡的生存時間分別為1 334 s和2 200 s,改進后的網絡生存時間延長了65%。
這是因為在RPL中,只采用ETX為路由度量,網絡拓撲一旦建立,只要網絡穩定,其拓撲將不再發生變化。即子節點一旦選定父節點,便會始終向它發包,不會再更換父節點,直至該父節點死亡。在這種情況下,類似節點3這種數據量大、鏈路質量突出的節點的能耗往往會顯著高于其他節點,成為網絡中的瓶頸節點。而在EB-RPL中,采用復合ETX和節點剩余能量的EB-ETX作為路由度量,并且根據本文的機制設計,隨著節點剩余能量的降低,其在路由度量中所占比重會顯著升高。即在后期網絡內節點能量受限時,會自適應地調整網絡拓撲,優先選擇剩余能量最多的父節點構成最優路徑。因此,改進后的EB-RPL能夠有效延長網絡生存時間。
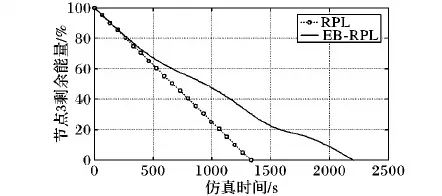
圖6 瓶頸節點生存時間比較
考慮到不同數據流量的LLN應用需求,在圖4的仿真場景中比較了不同發包間隔時兩種路由協議的網絡生存時間,結果如圖7(a)所示。實驗結果顯示,在不同的發包間隔下,EB-RPL比RPL平均延長了29.4%的網絡生存時間。
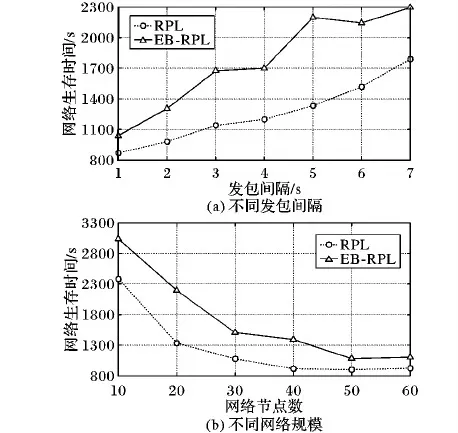
圖7 不同發包間隔和網絡規模中網絡的生存時間比較
為了驗證在不同的網絡規模下EB-RPL均有穩定的性能,設定發包間隔為5 s,在仿真區域內均勻部署10~60個節點,并對比了兩種路由協議在不同規模的網絡中的生存時間,結果如圖7(b)所示。在不同的網絡規模下,EB-RPL的網絡生存時間均顯著優于RPL,比RPL平均延長網絡生存時間達37.4%。
發包間隔變小和網絡規模增大對網絡的影響是類似的,網絡中數據流量都會隨之增大,導致網絡生存時間變短。在RPL中,只要網絡狀態穩定,節點到root的最優路徑始終是不變的,這會導致瓶頸節點提前死亡,特別是在網絡流量大的情況下,這一問題更加凸顯。而在EB-RPL中,隨著節點剩余能量的減少,會自適應地調整網絡拓撲,提升網絡生存時間。
3.4 能量均衡
網絡中的能量均衡也是比較路由協議性能的重要指標之一,但這并非指全網中所有節點間的能量均衡,因為只有同級節點間才有進行能耗比較的意義。
本文中采用Rank值為1的節點功率的標準差作為評判能量均衡的指標。在圖4的仿真場景中,根節點的一跳鄰居分別是節點2、3、4,為了證明EB-RPL能實現節點間能量均衡,本文比較了在不同發包間隔時,這三個節點功率的分布情況。由圖8可知,當發包間隔變大時,網絡總流量變小,節點的功耗隨之降低,同時在不同的發包間隔下,EX-RPL中節點功率的標準差都顯著低于RPL。這是因為EX-RPL中的自適應拓撲調整策略,在網絡的不同時期,節點會調整最佳路徑,從而避免了網絡中瓶頸節點的產生。

圖8 不同發包間隔時Rank值為1的節點功率分布情況
3.5 收包率
上述實驗表明EB-RPL能均衡網絡能量,延長網絡生存時間,本文進一步對網絡的可靠性進行驗證。固定發包間隔為5 s,在仿真區域內均勻部署10~60個節點,比較在不同網絡規模中采用兩種協議的網絡收包率。
根據圖9的仿真結果,當網絡規模增大時,網絡中包的數量和碰撞概率也隨之升高,導致網絡擁塞,造成更多的數據包丟失。采用RPL時,節點始終選擇鏈路質量最好的父節點為最佳父節點,導致這些節點產生嚴重的網絡擁塞現象,造成丟包。改進后的EB-RPL在網絡后期會重新調整拓撲,減小了出現嚴重擁塞現象的概率。因此,在不同網絡規模下,采用EB-RPL的網絡收包率均高于RPL,且隨著網絡規模增大,這種優勢會逐漸增大,當節點數量為60時,收包率較RPL提升了20%。
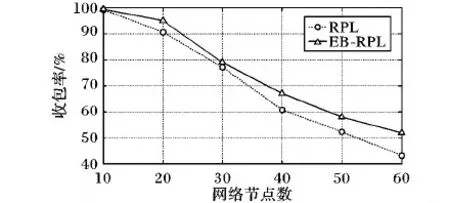
圖9 不同網絡規模下網絡的收包率比較
4 結語
針對RPL中存在瓶頸節點能耗突出、網絡生存時間短的問題,本文提出了一種兼顧鏈路可靠性和網絡生存時間的EB-RPL。該協議在RPL基礎上進行優化,提出了一種復合期望傳輸次數和節點剩余能量的路由度量EB-ETX;并在此基礎上設計了一種基于能量消耗速率的父節點電量估算策略,以解決RPL中“Trickle”定時器機制導致的父節點狀態信息更新不及時的問題。EB-RPL利用父節點估算電量可以及時更新路由開銷,自適應地調整網絡拓撲,實現了節點間的能量均衡,并有效延長了網絡生存時間。通過仿真分析表明,父節點電量估算策略具有較高的準確性;同時與RPL相比,EB-RPL能有效實現能量均衡、顯著延長網絡生存時間,其中最高延長了65%的網絡生存時間。
參考文獻(References)
[1] GARA F, SAAD L B, AVED R B, et al. RPL protocol adapted for healthcare and medical applications [C]// Proceedings of the 2015 International Wireless Communications and Mobile Computing Conference. Piscataway, NJ: IEEE, 2015: 690-695.
[2] XU G B, SHEN W M, WANG X B. Applications of wireless sensor networks in marine environment monitoring: a survey [J]. Sensors, 2014, 14(9): 16932-16954.
[3] WANG H Y, WANG J Y, HUANG M. Building a smart home system with WSN and service robot [C]// Proceedings of the 2013 Fifth International Conference on Measuring Technology and Mechatronics Automation. Piscataway, NJ: IEEE, 2013: 353-356.
[4] ANCILLOTTI E, BRUNO R, CONTI M. The role of the RPL routing protocol for smart grid communications [J]. IEEE Communications Magazine, 2013, 51(1): 75-83.
[5] WINTER T, THUBERT P, BRANDT A, et al. RPL: IPv6 routing protocol for low-power and lossy networks: RFC6550 [S]. Geneva: IETF, 2012: 1-157.
[6] LEVIS P, PATEL N, CULLER D, et al. Trickle: a self-regulating algorithm for code propagation and maintenance in wireless sensor networks [C]// Proceedings of the First Conference on Symposium on Networked Systems Design and Implementation. New York: ACM, 2004: 2-13.
[7] THUBERT P. Objective function zero for the routing protocol for low-power and lossy networks: RFC 6552 [S]. Geneva: IETF, 2012: 1-14.
[8] GNAWALI O, LEVIS P. The minimum rank with hysteresis objective function: RFC 6719[S]. Geneva: IETF, 2012: 1-14.
[9] COUTO D, AGUAYO D, BICKET J, et al. A high-throughput path metric for multi-hop wireless routing [J]. Wireless Networks, 2005, 11(4): 419-434.
[10] LONG N T, DECARO N, COLITTI W, et al. Comparative performance study of RPL in wireless sensor networks [C]// Proceedings of the 2012 IEEE 19th Symposium on Communications and Vehicular Technology in the Benelux. Piscataway, NJ: IEEE, 2012: 741-746.
[11] VUCINIC M, TOURANCHEAU B, DUDA A. Performance comparison of the RPL and LOADng routing protocols in a home automation scenario [C]// Proceedings of 2013 IEEE Wireless Communications and Networking Conference. Piscataway, NJ: IEEE, 2013: 1974-1979.
[12] GONIZZI P, MONICA R, FERRARI G. Design and evaluation of a delay-efficient RPL routing metric [C]// Proceedings of the 2013 9th International Wireless Communications and Mobile Computing Conference. Piscataway, NJ: IEEE, 2013: 1573-1577.
[13] TANG W, MA X, HUANG J, et al. Toward improved RPL: a congestion avoidance multipath routing protocol with time factor for wireless sensor networks [J]. Journal of Sensors, 2016, 10(2): 189-201.
[14] IOVA O, THEOLEVRE F, NNOEL T. Improving the network lifetime with energy-balancing routing: application to RPL [C]// Proceedings of the IEEE 7th Wireless and Mobile Networking Conference. Piscataway, NJ: IEEE, 2014: 121-128.
[15] 仇英輝, 陳玲.基于普通節點負載均衡的RPL路由協議[J]. 傳感技術學報, 2016, 29(7): 1077-1082.(QIU Y H, CHEN L. The RPL routing protocal based on load balance of ordinary node [J]. Chinese Journal of Sensors and Actuators, 2016, 29(7): 1077-1082.)
[16] 姚玉坤, 劉江兵, 李小勇.基于簇父集協作通信的低功耗有損網絡路由算法優化[J]. 計算機應用, 2017, 37(5): 1300-1305.(YAO Y K, LIU J B, LI X Y. Optimized routing algorithm based on cooperative communication of cluster parent set for low power and lossy network [J]. Journal of Computer Applications, 2017, 37(5): 1300-1305.)
[17] 齊玥.基于RPL協議的路由度量標準研究與改進[D]. 蘭州: 蘭州大學, 2016: 15-36.(QI Y. Research and improvement of routing metric based on RPL [D]. Lanzhou: Lanzhou University, 2016: 15-36.)
[18] VASSEUR J, KIM M, PISTER K, et al. Routing metrics used for path calculation in low-power and lossy networks: RFC 6551 [S]. Geneva: IETF, 2012: 1-30.
[19] BUETTNER M, YEE G V, ANDERSON E, et al. X-MAC: a short preamble MAC protocol for duty-cycled wireless sensor networks [C]// Proceedings of the 4th International Conference on Embedded Networked Sensor Systems. New York: ACM, 2006: 307-320.
[20] DUNKELS A, GRONVALL B, VOIGT T. Contiki — a lightweight and flexible operating system for tiny networked sensors [C]// Proceedings of 29th Annual IEEE International Conference on Local Computer Networks. Piscataway, NJ: IEEE, 2004: 455-462.
This work is partially supported by the National Key R&D Program of China (2016YFC0801505).