電動汽車轉速估計器設計
2018-06-21 02:51:04秦峻龍劉梁鴻鐘紅波
電氣技術 2018年6期
關鍵詞:系統
秦峻龍 蔣 林 劉梁鴻 袁 滿 鐘紅波
?
電動汽車轉速估計器設計
秦峻龍 蔣 林 劉梁鴻 袁 滿 鐘紅波
(西南石油大學電氣信息學院,成都 610500)
針對現有電動汽車轉速測量系統故障率高的問題,本文提出了一種基于無速度傳感器原理的新型測速系統。該測速系統的主拓撲采用直-交結構,通過檢測系統電流與電壓的瞬時值,采用矢量控制方式,使永磁同步電動機模型等效為直流電動機,根據反饋的電流、電壓信號利用DSP在軟件上產生觸發脈沖,驅動SVPWM模塊控制電動機。基于TI公司的TMS320F28055控制芯片,搭建了轉速估計系統的控制平臺。仿真結果表明,轉速估計器能夠實現估計轉速對實際轉速的準確跟蹤,理論上滿足了設計指標。在開環條件下,實物也得到了驗證。
永磁同步電動機;矢量控制;DSP;全階磁鏈觀測器;無速度傳感器
近年來,隨著新能源政策陸續出臺,電動汽車的發展勢頭強勁[1]。汽車使用過程中,轉速測量是必不可少的一部分。其能夠將轉速信號傳送到儀表盤,供駕駛員參考,有效提高汽車的行駛性能。而速度傳感器準確的測速,就成了速度測量系統的重要問題[2]。目前國內的速度傳感器基本上采用的是增量式編碼器測速,而由于安裝技術復雜,速度傳感器與電動機軸很難達到完全同心,因此降低了測量精度,同時增加了故障率,影響汽車行駛性能。校正過程會導致更多粉塵進入電動機,并且頻繁的校正也會給電動機造成不可修復的損傷。而無速度傳感器作為一種非接觸式的測速方式,運用在汽車測速中,它無需直接測量轉速,只采集電動機運行時的電流和電壓信號,不存在同心度問題。無需增加設備,便于維護,這大大提高了汽車測速的可靠性與經濟性[3]。
目前轉速估計方法有[4-6]直接計算法、模型參考自適應法、滑膜觀測器法和全階狀態觀測器法等。直接計算法直接根據同步角速度與轉差角速度作差得到轉子電氣角速度,但是不存在任何誤差校正環節,嚴重依賴電動機參數;模型參考自適應法利用參考模型與可調模型輸出量的誤差構成相應的辨識機構來辨識電動機轉速,但是轉速的辨識精度不高,對參數依賴性大;滑膜觀測器法采用估計電流偏差來確定滑模控制機構,并使控制系統的狀態最終穩定在滑模超平面上,但是存在嚴重的抖振現象;全階狀態觀測器法引入了電流的誤差反饋量,形成了閉環觀測,辨識精度較高,且通過觀測器反饋增益矩陣合理配置觀測器極點,可使觀測器收斂速度較快,動態性能較好。而本文所采用的方法為全階狀態觀測器法來辨識電動機的轉速,通過配置合適的反饋增益矩陣,使系統具有辨識精度高,魯棒性強,動態性能好等優點;與傳統電動汽車轉速辨識相比較,通過全階觀測器法來辨識電動汽車的轉速,使轉速的辨識精度得到了提高,電動汽車穩定運行得到了充分保證。
1 永磁同步電動機數學模型
為了簡化分析,在建立永磁同步電動機數學模型時,一般作以下假設:假設轉子永磁磁場在氣隙空間分布為正弦波;忽略定子鐵心飽和;不計鐵心的渦流與磁滯損耗;轉子上無繞組電阻。在dq坐標下,永磁同步電動機數學模型為

式中,d、d分別為d軸上的電壓和電流分量;q、q分別為q軸上的電壓和電流分量;d、q分別為直、交軸電感;為電動機的定子繞組電阻;為電動機的電角速度;為永磁體與定子交鏈磁鏈;e為永磁同步電動機的轉矩;為電動機極對數。
2 全階磁鏈觀測器(AFO)
該轉速估計系統是把永磁同步電動機本身作為參考模型,構造的全階磁鏈觀測器作為可調模型,如圖1所示。
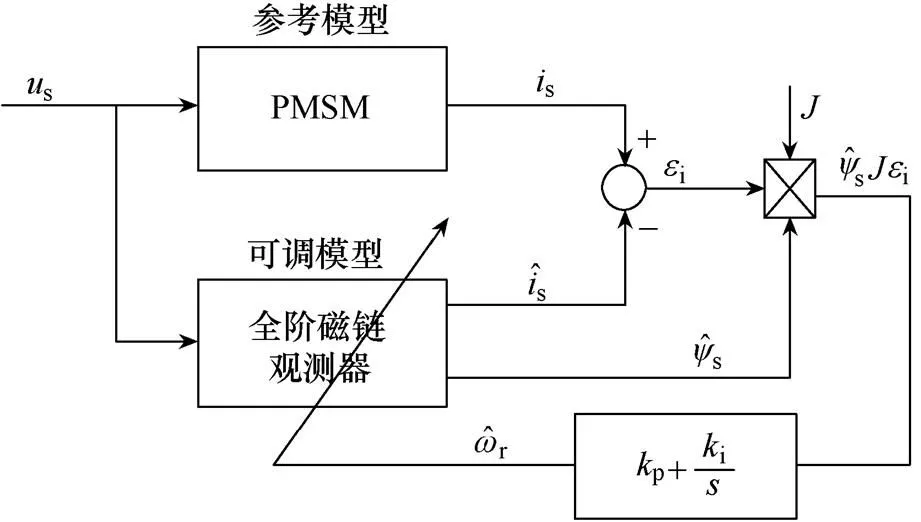
圖1 基于AFO的轉速估計系統
2.1 AFO的數學模型
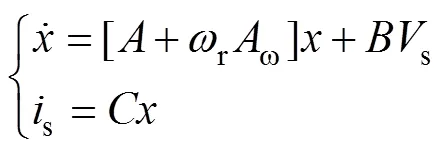
永磁同步電動機可由以下的狀態方程來描述:

2.2 穩定性分析
1)轉速自適應律
定義李雅普洛夫函數如下:
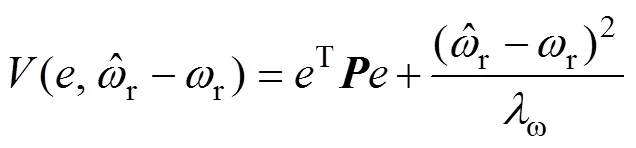
對式(3)求一階導,得



自適應率由下式給出:

轉速的自適應辨識算法為
2)反饋增益矩陣

滿足此條件的增益矩陣不止一組,但通常取其中一組較為簡單的解[7],即
此處取1.5。
3 仿真結果及實物驗證
永磁同步電動機的無速度傳感器矢量控制系統如圖3所示[8],主要包括單相整流、三相逆變、信號檢測、隔離驅動、控制回路、感應電動機等幾個部分。其中控制回路包括全階磁鏈觀測器、PI調節器、坐標變換、轉矩計算、SVPWM等模塊,采用TI公司主頻為60MHz的DSP28055控制芯片實現。系統開關設定為20kHz,即采用周期為50ms。中斷服務程序頻率10kHz。永磁同步電動機的參數為額定功率N=0.6kW,額定電壓N=220V,額定電流N=4A,頻率N=50Hz,額定轉速N=3000r/min,定子電阻s=0.985W,定子電感直軸分量d=2.96mH,定子電感交軸分量q=2.96mH,極對數p=1。控制回路的主程序流程圖如圖2所示。
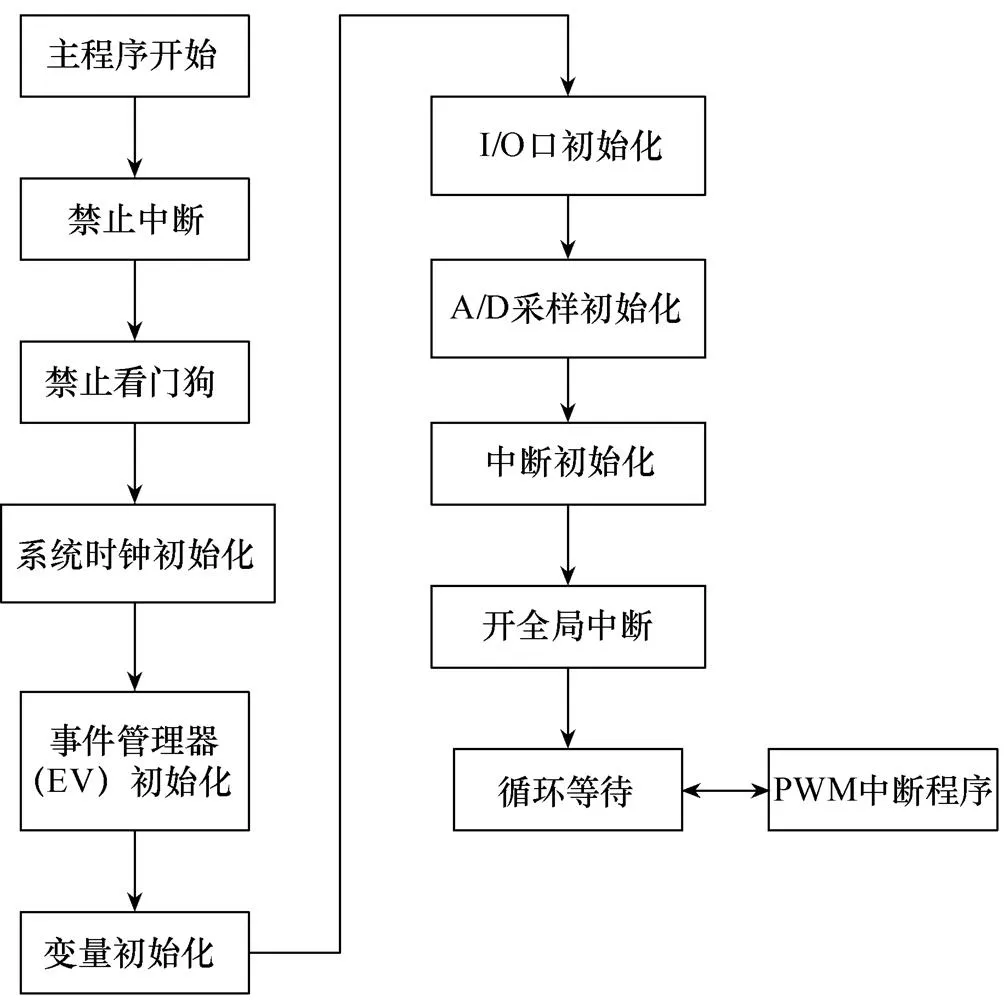
圖2 主程序流程圖
3.1 基于Simulink的永磁同步電動機轉速估計仿真
1)電動機在高速狀況下四象限的工作波形分析分別如圖3至圖7所示。
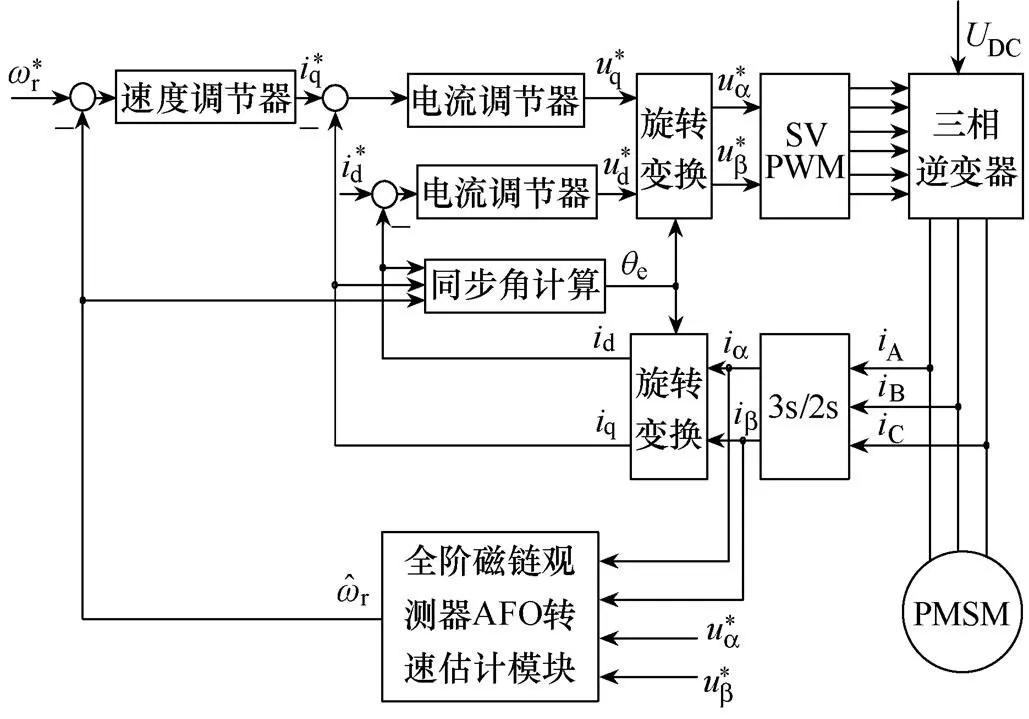
圖3 無速度傳感器(AFO)矢量控制系統
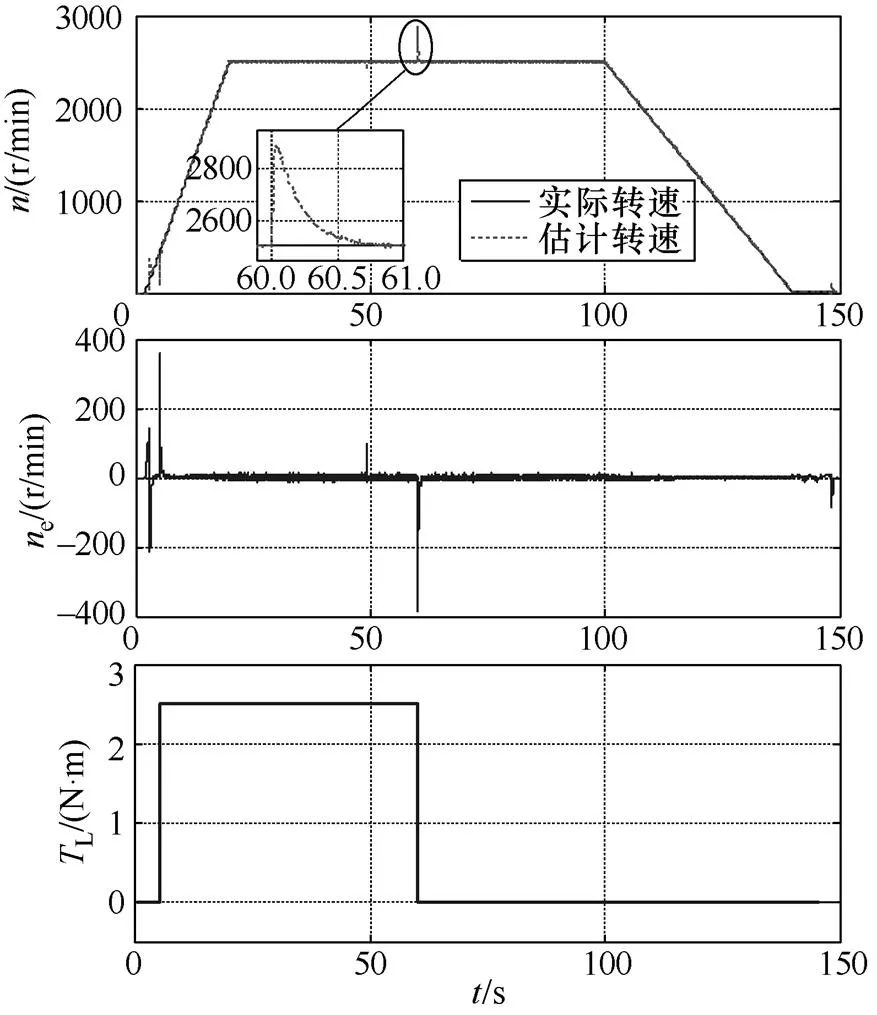
圖4 電動機一象限運行的動態響應
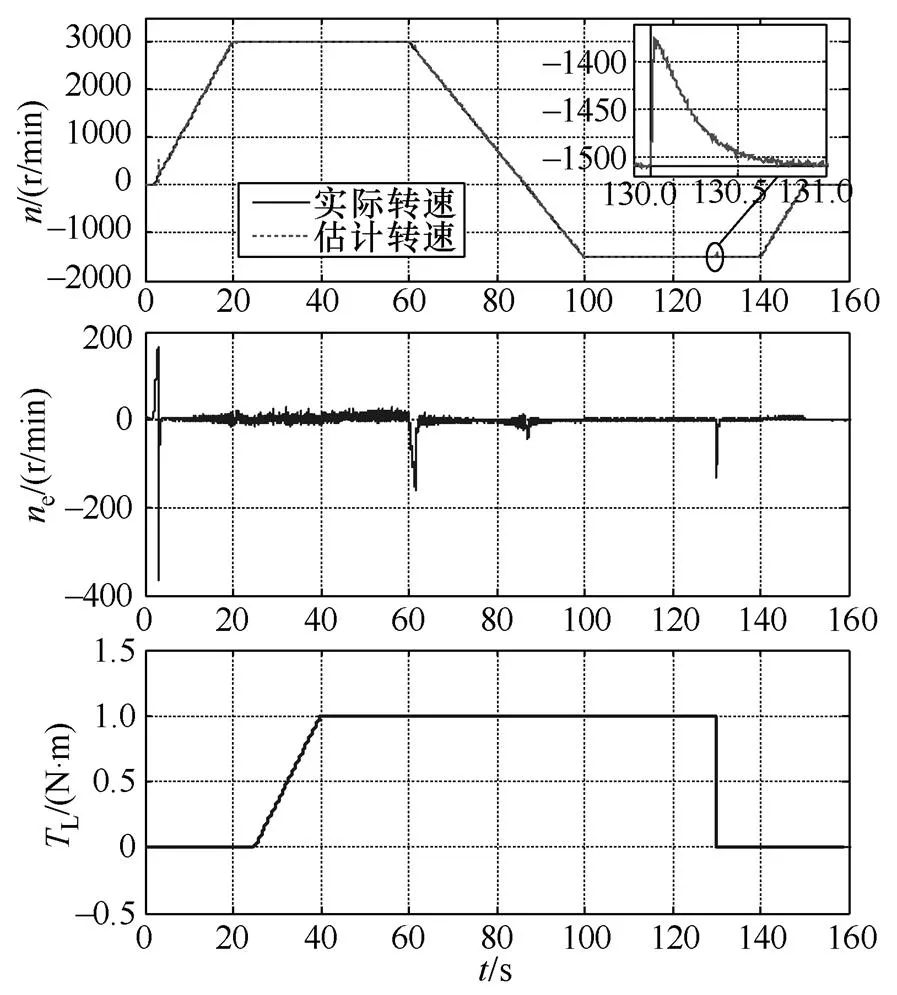
圖5 電動機一、二象限切換運行的動態響應

圖6 電動機一、四象限切換運行的動態響應
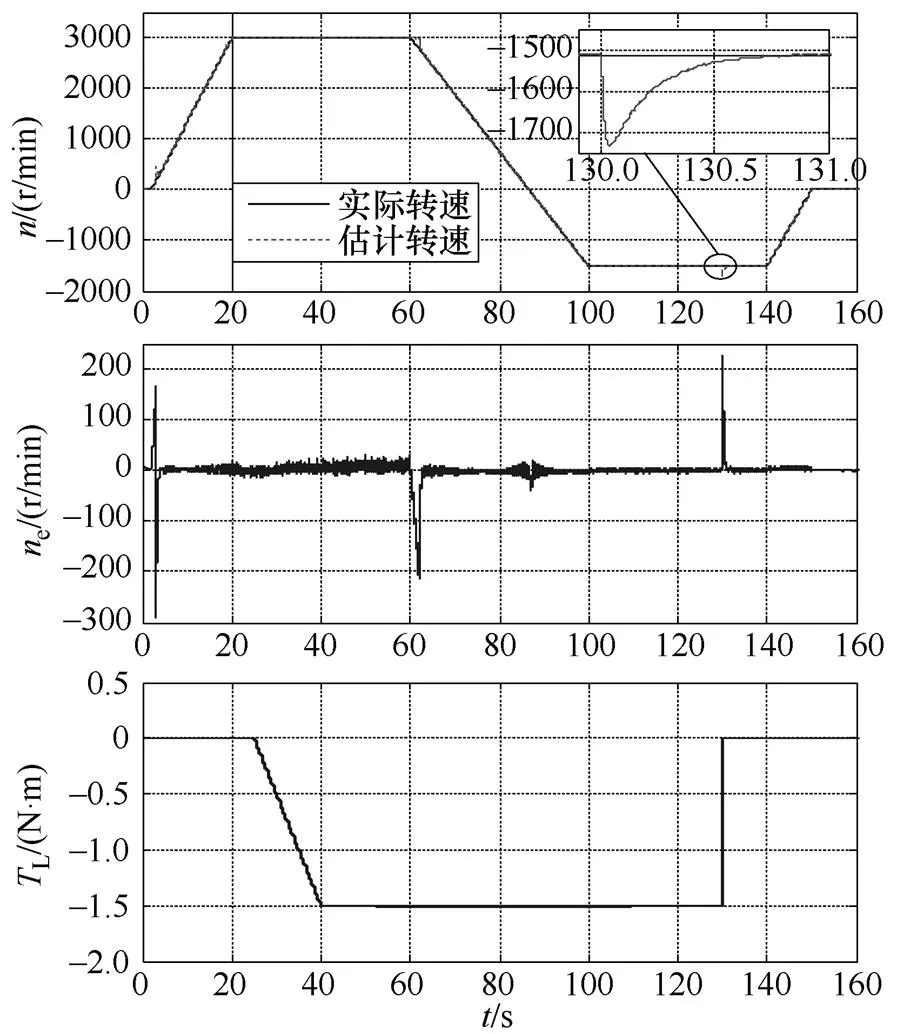
圖7 電動機二、三象限切換運行的動態響應
2)電動機在低速狀態下運行時的A相電流波形和轉速波形分別如圖8、圖9所示。
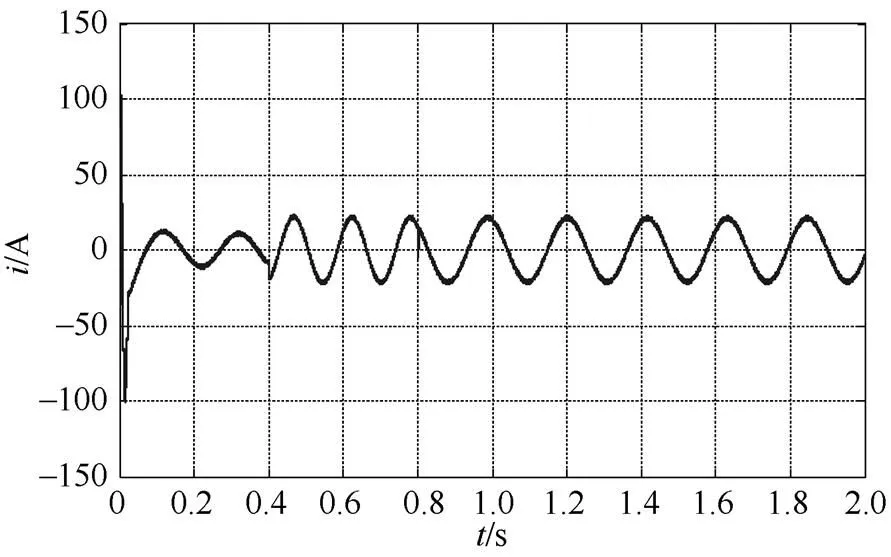
圖8 低速段運行時A相電流波形
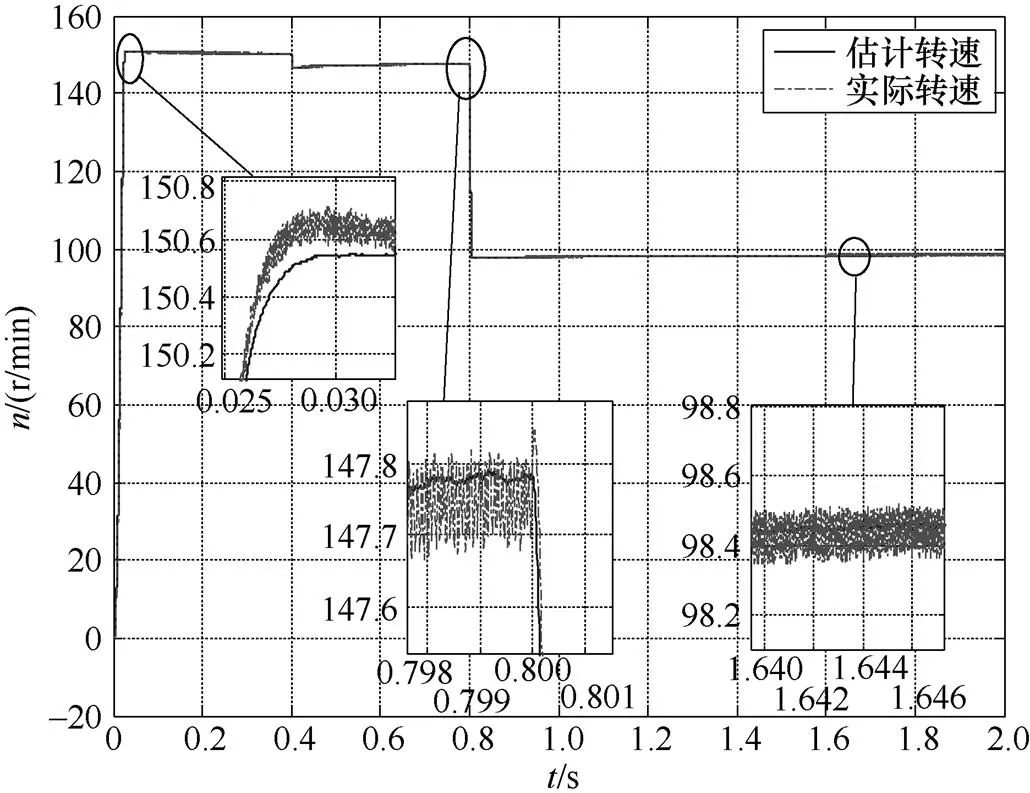
圖9 低速段運行時轉速波形
仿真結果表明,轉速估計器能夠在四個象限內都能對電動機轉速進行準確估計[9-10]。且在轉速或轉矩突變時,估計誤差較小。轉速估計誤差在2%以內,滿足永磁同步電動機負載運行轉速的變化要求。電動機的實際轉速與全階磁鏈觀測器(AFO)的估計轉速在電動機起動、加載、加速、減速和各個穩態過程中,響應速度快,估計轉速都能夠較精確地跟蹤實際轉速,驗證了AFO自適應系統對轉速估計的適用性[10]。當電動機運行在低速段時,0.03s時,A相電流即恢復穩定接近正弦波,轉速超調量較小。0.8s時,轉速由150r/min下降為100r/min,電磁轉矩能夠快速恢復,A相電流波形保持穩定。由以上分析,滿足設計的要求。
3.2 實物驗證
基于圖3所示的系統框圖搭建硬件實驗平臺,得到實驗結果如圖所示。圖10至圖12為本實驗的逆變模塊的觸發脈沖波形。圖13為經系統矢量控制技術后,所產生的兩相靜止坐標系下的波形。圖14為正、反轉時實際轉速與估計轉速波形。圖15為突加負載時的轉速波形(橫軸5s/格,縱軸500r/min)。
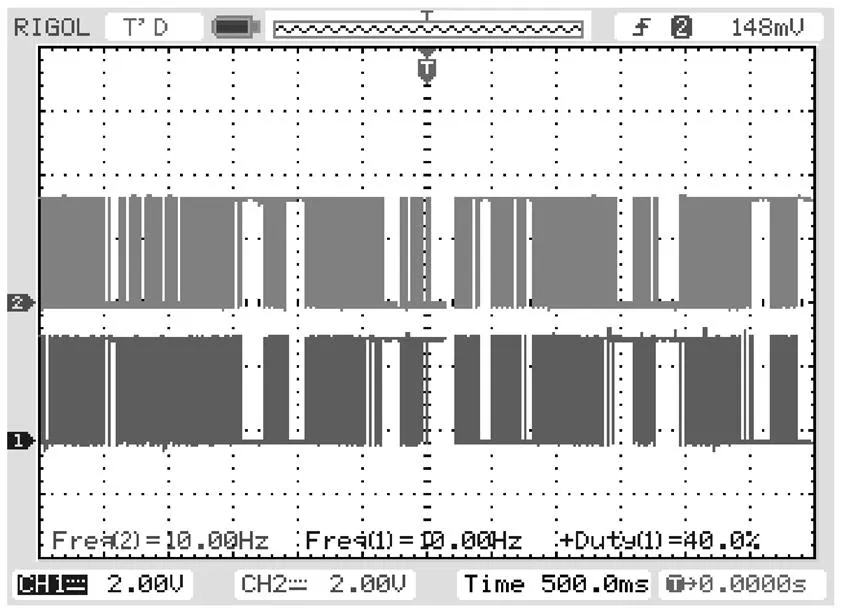
圖10 觸發脈沖波形1
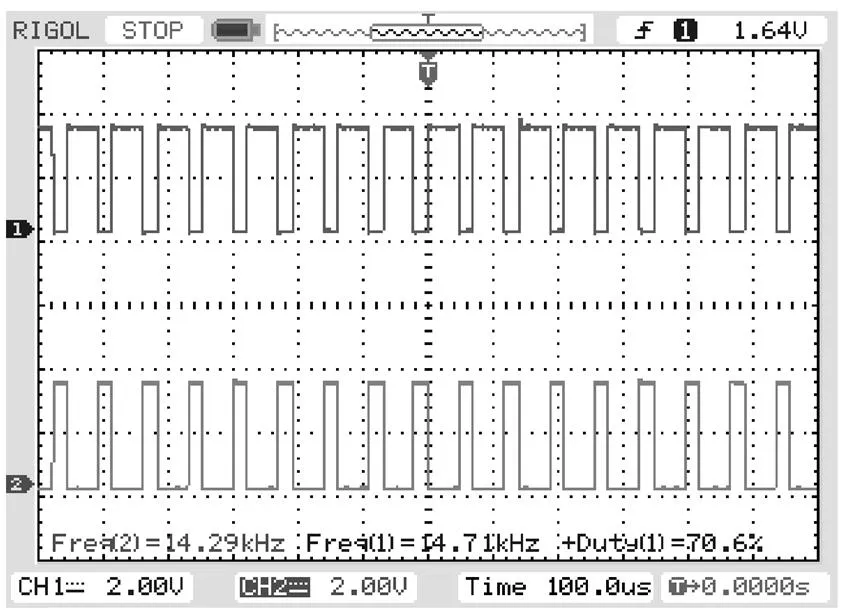
圖11 觸發脈沖波形2
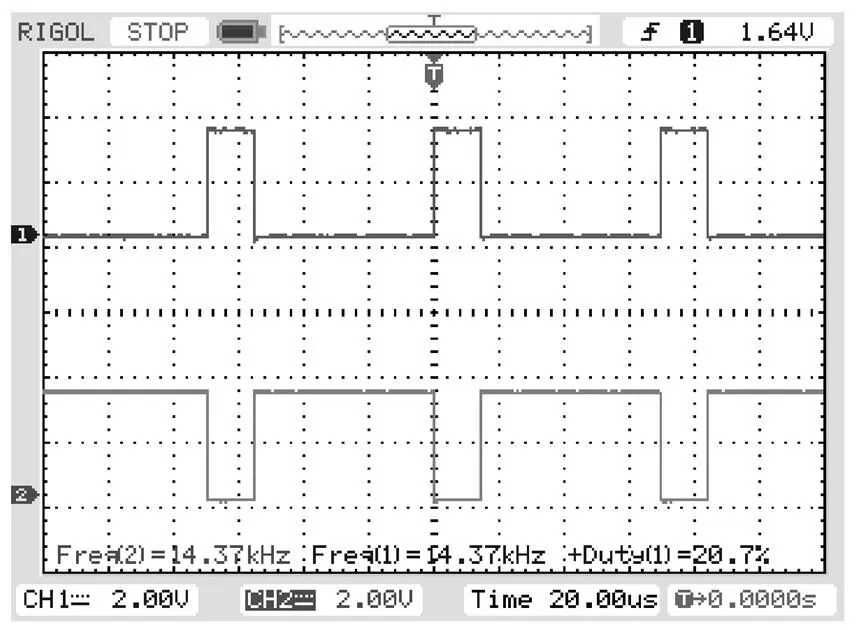
圖12 觸發脈沖波形3
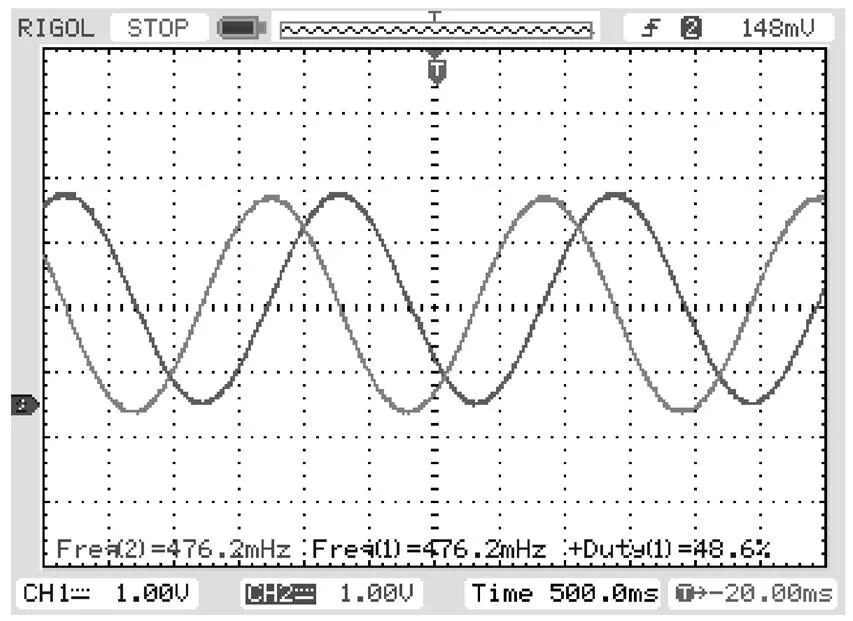
圖13 兩相靜止坐標系下的電壓波形
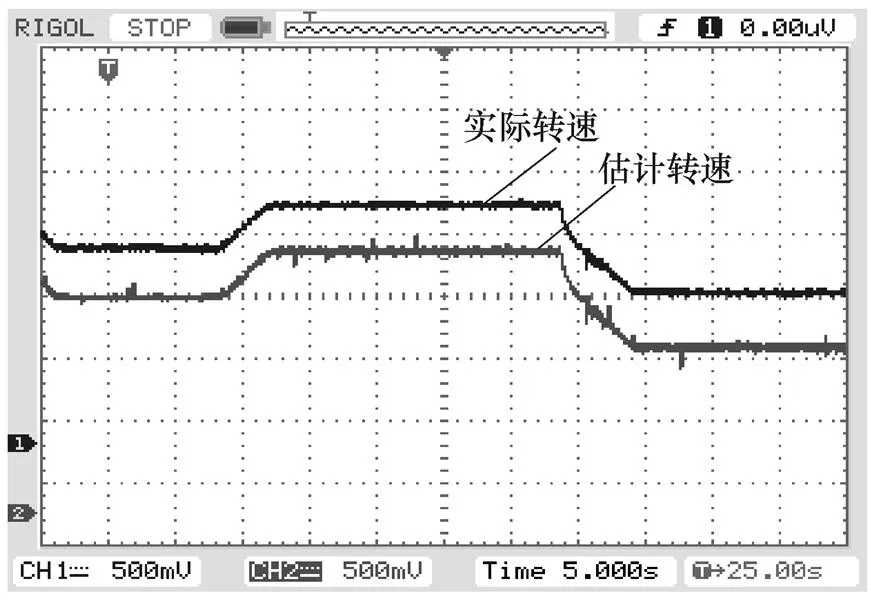
圖14 實際轉速與估計轉速正反轉波形
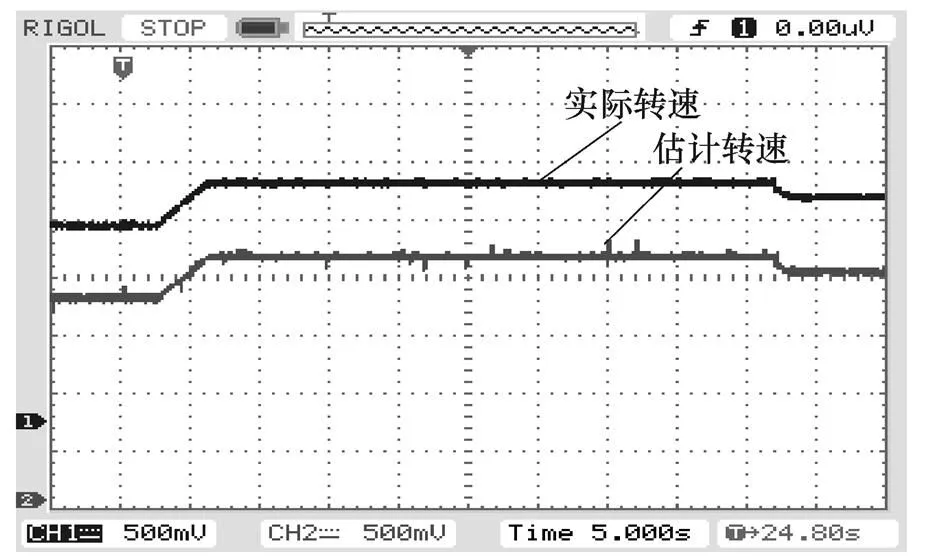
圖15 突加負載時電動機的轉速波形
4 結論
基于永磁同步電動機的全階磁鏈觀測器模型,設計了轉速估計器,完成了對轉速自適應律和反饋增益矩陣的設計,基于Matlab仿真平臺,搭建了基于全階磁鏈觀測器的永磁同步電動機矢量控制系統仿真模型。仿真結果表明了該轉速估計器能夠在全速范圍內各種工況下穩定運行,估計轉速能夠準確的跟蹤實際轉速,且轉速誤差在2%以內。基于仿真系統構建了基于DSP28055調速系統平臺,完成了對轉速估計器的開環實驗驗證。實驗結果表明,該方法能夠準確觀測出電動汽車的轉速信息,且轉速估計精度高。
[1] 黃小慶, 陳頡, 田世明, 等. 電動汽車充電站規劃、運行中的大數據集成應用[J]. 電網技術, 2016, 40(3): 762-767.
[2] 林穎, 王長林. 車載列車自動防護系統對空轉及滑行的檢測與校正方法研究[J]. 城市軌道交通研究, 2011, 14(3): 28-31, 36.
[3] 劉文霞, 張蕾蕾, 劉宗歧, 等. 城市純電動汽車發展模式論證方法[J]. 電力系統自動化, 2014, 38(24): 34-40.
[4] 孔龍濤, 程明, 張邦富. 基于模型參考自適應系統的模塊化磁通切換永磁直線電機無位置傳感器控制[J]. 電工技術學報, 2016, 31(17): 132-139.
[5] 徐心怡. 基于擴展滑膜控制器的PMSM無速度傳感器探究[J]. 電子測試, 2015(5): 4-6.
[6] 袁慶偉, 趙榮祥. 三相四開關逆變器供電的IPMSM直接轉矩控制系統建模與分析[J]. 電工技術學報, 2017, 32(15): 76-88.
[7] 郭緒猛, 劉景林. 永磁同步電機直接轉矩控制研究與仿真[J]. 微電機, 2007, 40(4): 12-14.
[8] 侯利民, 郭鳳儀, 宋紹樓, 等. 無速度傳感器的PMSM最優轉矩控制系統研究[J]. 長春工業大學學報, 2008, 29(5): 526-529.
[9] 周喆, 吳俊, 楊俊翔, 等. 異步電動機無速度傳感器矢量控制研究[J]. 電氣技術, 2016, 17(12): 41-44.
[10] 應凱, 蔣林, 李洪波, 等. 基于定子電流模型的MRAS系統仿真研究[J]. 電氣技術, 2012, 13(9): 19- 23.
Design of speed estimator for electric vehicle
Qin Junlong Jiang Lin Liu Lianghong Yuan Man Zhong Hongbo
(School of Electrical and Information Engineering, Southwest Petroleum University, Chengdu 610500)
A new speed measuring system based on speed sensorless principle is presented to solve the problem of high rate of faults in the existing electric vehicle speed measurement system. The main topology of the speed measuring system adopts the DC-AC structure, the instantaneous current and voltage value of the detecting system, the vector control strategy, the equivalent model of permanent magnet synchronous motor is a DC motor, according to the feedback of current and voltage signal using the DSP trigger pulse is generated in the software, control motor driver module SVPWM. Based on the TMS320F28055 control chip of TI company, the control platform of the speed estimation system is built. The simulation results show that the speed estimator can realize the accurate tracking of the estimated speed to the actual speed, and meets the design index in theory. In open-loop conditions, the physical object has also been verified.
PMSM; vector control; DSP; full order flux observer; speed sensorless
2017-11-27
秦峻龍(1993-),男,四川成都人,本科,主要從事電機及其控制工作。
四川省創新訓練項目(201610615008)
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32