具有驗電與接地一體化的智能掛接地線裝置研究*
2018-06-22 08:30:46劉家軍韓思丹
電氣傳動自動化 2018年2期
劉家軍,韓思丹
(西安理工大學水利水電學院,陜西西安710048)
1 引言
在接觸網線路檢修作業中,為了確保檢修人員的安全,需在相關作業區間掛接接地線。在傳統的操作過程中,檢修人員需攜帶多中絕緣工器具(驗電器、接地線等)抵達現場,人工進行驗電和放電操作后,確定線路無電后再手動掛接地線,在檢修作業完成后,檢修人員需要拆除全部接地線后再送電[1-5]。驗電器與接地線是檢修作業中必不可少的工具,為了保證線路作業人員的安全,驗電后掛接地線步驟的連續是十分重要的[6-8]。1接觸網日常檢修作業的絕緣工器具種類雜,數量多,對于檢修人員需要注意工具的攜帶、保管和維護,增加了工作量。且線路檢修多為高空作業,攜帶多種絕緣工器具也增加了高空作業的作業強度。
文獻[9]應用視頻監視和遠程自動化控制技術,研究了一種接觸網驗電、放電、接地一體化的全過程快速遙控操作裝置,采用直流驗電閉鎖控制器作為裝置的核心控制單元,控制裝置驗電、放電與接地,并將信息通過通信接口上傳至后臺系統。但是該裝置舍棄了傳統的絕緣操作桿,安全可靠性降低。文獻[10]研制了一種可帶電操作檢查螺栓松緊程度的新型裝置。該裝置采用雙管式結構,內部桿件帶動頭部套筒運動,尾部采用鋼制的搖柄。操作桿頭部使用了雙齒輪結構,通過齒輪傳動變換套筒方向,使得操作桿不僅可以緊固順線路方向的螺栓還可以操作橫線路方向的螺栓。該絕緣操作桿僅適用于檢查螺栓松緊程度的作業。文獻[11]設計了一種遙控多功能驗電器,伸縮桿體頂部設置驗電器,采用紅外信號傳遞信息,電機驅動齒輪和伸縮齒條實現桿體的自動伸縮。該裝置紅外信號易受到干擾,且驅動裝置采用齒輪和伸縮齒條增加驗電桿本身的重量,增加作業人員的作業負擔。
針對上述問題,本文設計了具有驗電與接地一體化的智能掛接地線裝置,通過可伸縮的驗電桿實現在不用更換絕緣工器具的情況下,完成先驗電,后掛接地線。有效減少操作人員攜帶檢修工具的種類,提高線路日常檢修工作的效率
2 總體方案設計
2.1 設計方案

圖1 接觸網地線桿
現有接觸網地線桿如圖1所示,在實際現場作業時,三節絕緣桿通過螺紋連接使用,以此達到操作距離,三節絕緣桿均為環氧樹脂制成的中空桿。
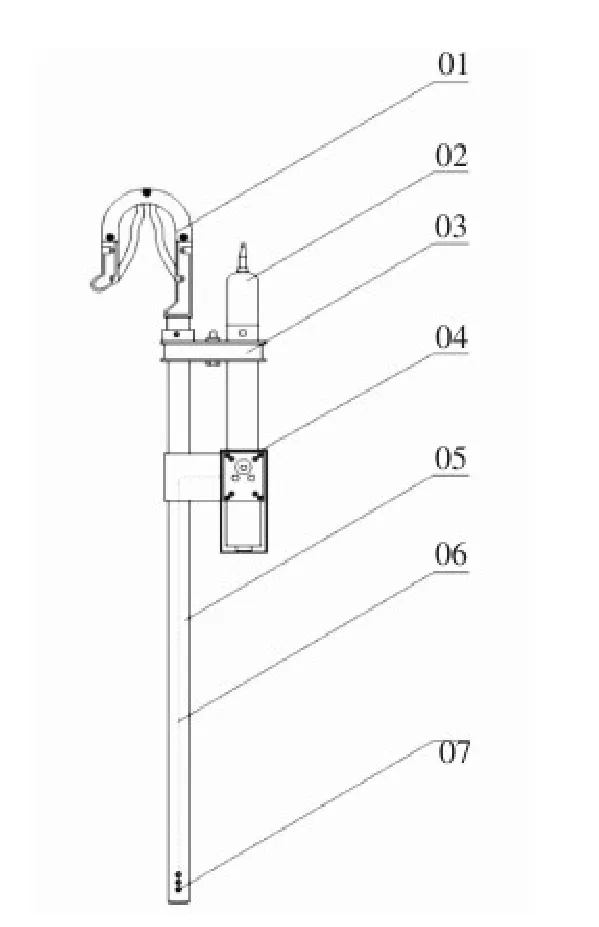
圖2 裝置結構示意圖
具有驗電與接地一體化的智能掛接地線裝置如圖2所示,該裝置由五部分構成:地線掛鉤、地線桿、驗電器和伸縮式驗電桿。伸縮式驗電桿在驗電前后處于縮回狀態,如需驗電,按鈕控制伸縮機構運動,驗電桿隨著伸縮機構伸長到操作高度。在驗電工作完成后,地線掛鉤和地線桿用來掛接地線。這樣在驗電與掛接地線中間無需更換絕緣工器具。驗電器與驗電桿通過螺紋連接固定。該結構相對簡單,操作方便,便于檢修人員使用。
2.2 工作原理
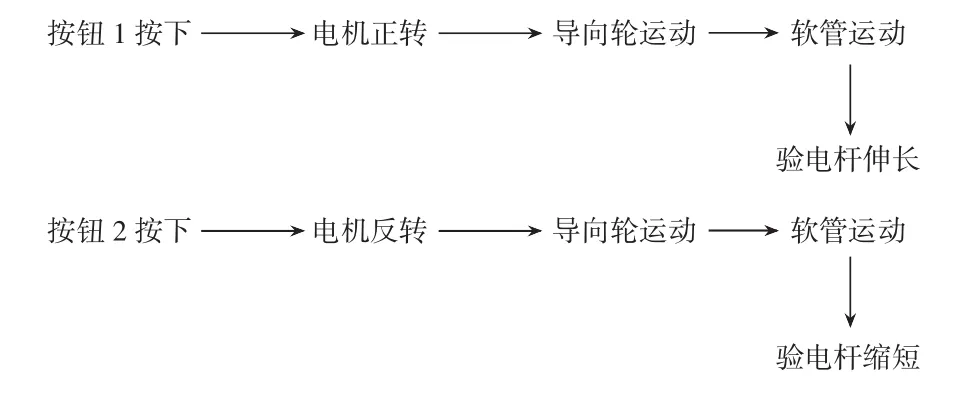
圖3 機構運動傳遞簡圖
如圖3所示,在進行驗電桿伸縮的時候,首先按鈕給單片機信號,單片機控制電機正轉提供動力,使導向輪旋轉運動,帶動軟管直線運動,驗電桿伸長。同理,當電機反轉時,驗電桿縮回。
3 伸縮式驗電桿設計
伸縮式驗電桿由電機、雙導向輪、PU空心軟管以及三節伸縮桿組成。雙導向輪與電機設置在驗電桿尾部,電機提供原動力,控制雙導向輪轉動。PU空心軟管帶動三節伸縮桿伸縮。
導向輪是帶有滑輪結構的器件,主要用于對軟體管道或者軟體線性物體(鋼絲、尼龍繩等)移動過程中的方向引導。在某些項目或產品中使用導向輪可以起到省力的作用。本文導向輪伸縮機構中導向輪起傳動作用,將旋轉運動變換為直線運動,它是構成導向輪伸縮機構的重要組成部分[12-14]。
雙導向輪,一個作為主動輪,一個作為從動輪。電機給主動輪動力后,兩輪接觸面間將產生法向力,由法向力產生的摩擦力將帶動從動輪轉動。主動輪與從動輪的轉動方向相反。如圖4所示,在兩導向輪中間放置PU空心軟管,軟管管徑需和雙導向輪之間空隙直徑相等。當主動輪順時針轉動帶動從動輪逆時針轉動時,與軟管外壁產生摩擦力,使得空心軟管向下移動。同理,當主動輪逆時針轉動帶動從動輪順時針轉動時,空心軟管向上移動。
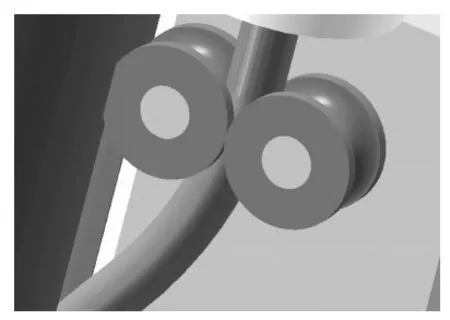
圖4 導向輪伸縮機構結構簡圖
通過分析導向輪伸縮機構中導向輪與空心軟管之間的接觸應力,為二者的尺寸大小設計提供一定的理論依據。
根據赫茲接觸理論可得,當導向輪與空心軟管接觸時,由于二者的接觸部分為線面接觸,所以受力后接觸面形狀為矩形,而且該接觸面的壓應力分布為一個半橢圓體,如圖5所示。設矩形的長度為L,寬度為2b,圖中F為外部載荷,R為導向輪半徑。
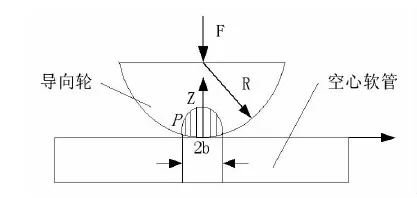
圖5 導向輪與空心軟管接觸圖
由于矩形接觸面的寬度2b?R,所以可以將接觸面上的任一點按照彈性力學理論中的半無限平面來進行分析,一般圓柱體與平面的接觸公式為:
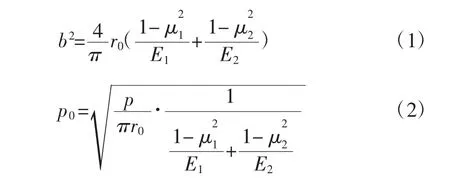
則導向輪和空心軟管接觸部位的b和p0為
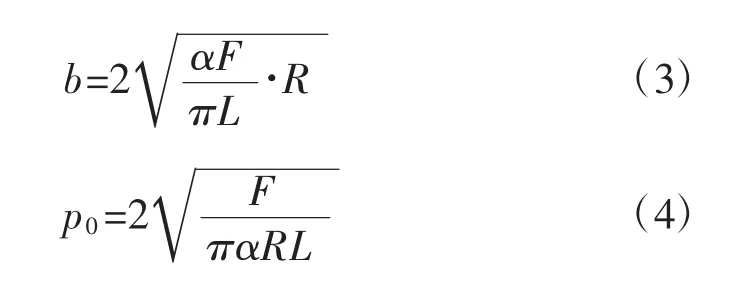
由式可得:矩形接觸面的半寬度b與F、R的平方根成正比,和L的平方根成反比;最大接觸應力p0與F的平方根成正比,與R、L的平方根成反比。
因而在設計時,結合雙導向輪與PU空心軟管之間的運動以及應力分析,選擇外徑19mm,繩槽半徑為4mm的U槽導向輪。PU空心軟管選擇外徑8mm,內徑6mm,以此保證二者之間的相對運動。
三節伸縮桿采用釣魚竿的結構,即桿套桿式伸縮結構,該結構是由多個同軸圓筒依次嵌套構成,且圓筒直徑依次減小。第一節管嵌套在第二節管里,第二節管嵌套在第三節管里。軟管固定在第一節管頂部,當空心軟管向上運動時,將帶動三節伸縮桿的伸長。
同理,當空心軟管向下運動時,將使第一節管縮回,同時帶動三節伸縮桿縮回。第一節管頂部固定有驗電器。
綜合考慮重量,絕緣,價格等因素,三節伸縮桿均采用PC高強度管,第一節管長度為0.68m,外徑35mm,內徑29mm,第二節管長度為0.7m,外徑24mm,內徑18mm,第三節管長度為0.71m,外徑18mm,內徑12mm。
4 控制系統設計
4.1 電機選擇
由于步進電機適合微電腦和單片機控制,且耐用,成本低,綜合考慮實際使用及性價比,本文選用步進電機作為動力源。步進電機是一種用來精確控制位置和速度的電機。步進電機的最大特點是其“數字性”,對于接收到的一個脈沖信號,步進電機在驅動器的推動下將運轉一個固定的角度。如接收到一串脈沖信號,步進電機將連續運轉一段距離。同時要想改變電機的轉速,可以通過改變脈沖頻率實現。
步進電機的選擇主要是以負載的阻力矩為依據,電機的扭矩大于負載的力矩,電機才可帶動負載運轉。本文通過估算的方法來確定負載阻力矩。計算中摩擦阻力為主要考慮因素,在設計中選取的是PU空心軟管,其摩擦系數為 0.08-0.12,計算中取其值為0.1。

式中:F—摩擦阻力,N;
μ—摩擦系數;
M—工作負荷(即為驗電桿重力),N。

式中:T—阻力矩,N·m;
L—阻力作用點到轉軸距離,m。則:
T= μ×M×L=0.1×0.35×9.8×1.38=0.47
通過對比價格、質量、安裝尺寸等因素,最終選擇42BYGH40-1.2A步進電機,其參數如表1所示。

表1 步進電機參數
4.2 電機驅動模塊
步進電機驅動系統由步進電機和驅動器構成。步進電機使用時不能直接接到工頻交流或直流電源上,必須通過專業的驅動器,驅動器采用單極性直流電源供電。要使步進電機步進轉動,需要按合適的時序給步進電機的各項繞組通電,就能使步進電機步進轉動。為配合已選用步進電機的使用,本文選擇電機驅動模塊L298N,其參數如表2所示。

表2 驅動模塊參數
4.3 控制模塊
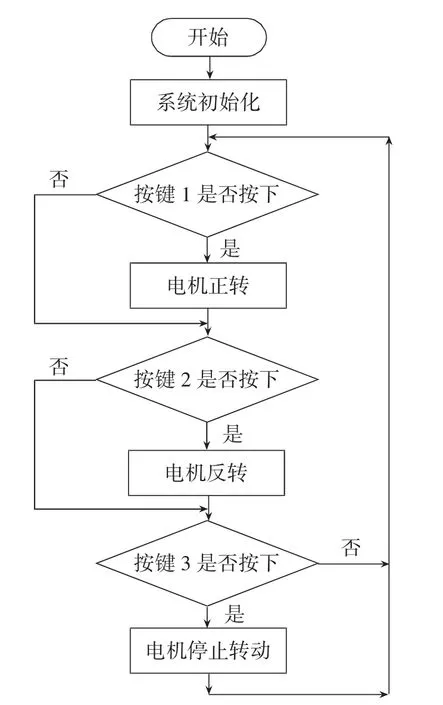
圖6 系統流程圖
綜合考慮已選用的步進電機和驅動模塊,最終選取基于ARM Cortex-M3內核的STM32處理器。該處理器的數據處理能力為 1.25DMips/MHz,相比于同類型芯片,STM32在數據處理能力方面有著非常明顯的優勢;相較于51、AVR系列單片機,STM32具有結構簡單、開發難度低、功能強等優勢,在各領域STM32的應用十分廣泛。本文通過三個按鈕開關分別控制電機的正轉、反轉及停止,三個按鈕不可同時按下,一個按鈕控制一個狀態,從而實現驗電桿的自動伸縮。步進電機的轉向同其繞組的通電順序有關,將按鈕開關信號作為系統的輸入信號,ARM單片機控制輸出相應的脈沖信號和方向信號,該信號通過驅動器功率放大,達到步進電機所需要的驅動電壓和驅動電流,從而控制步進電機動作。
芯片選購完成后,進行編程,具體程序結構如圖6所示。
5 三維建模
SolidWorks軟件是最有影響力的三維軟件之一,它具有非全約束的特征建模技術,為設計者修改模型提供便利,在設計的過程中修改部分設計,其他與之相關聯的部分也會隨之改變[15]。它集成設計、分析、加工和數據管理,通過查看模型的屬性可以獲得分析和加工模擬結果,在特征管理器中詳細地列出了相關數據信息,作為設計者修改、優化設計的依據。SolidWorks是機械設計經常使用的建模軟件之一,可以很方便地完成各種復雜模型的設計。本文采用SolidWorks進行絕緣操作桿的三維建模,所建模型如圖7所示。
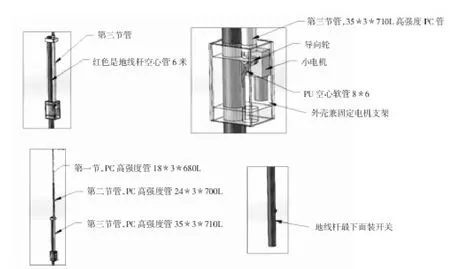
圖7 絕緣操作桿三維模型
6 結束語
本文在對現有掛接地線裝置結構分析的基礎上,通過合理的機械設計和單片機控制,設計了具有驗電與接地一體化的智能掛接地線裝置,解決了傳統接觸網驗電放電接地模式存在的安全隱患和不足。該裝置集驗電與接地功能于一體,減少了絕緣工器具的數量,極大地縮短了操作時間,提高了操作的安全性和可靠性。
(1)采用電機控制雙導向輪的結構,在摩擦力的作用下實現驗電桿的自動伸縮,綜合考慮多種因素,確定零件型號;
(2)利用步進電機和單片機所組成的控制系統,實現驗電桿伸縮。
(3)通過使用三維建模軟件SolidWorks進行建模仿真,確定了裝置的結構,證明了本次設計的合理性與可行性,為后續實物制作奠定了基礎。
