基于穿線(xiàn)法的輪胎簾線(xiàn)彎曲缺陷檢測(cè)
2018-06-26 04:32:28,,
關(guān)鍵詞:檢測(cè)
, ,
(濟(jì)南大學(xué) a. 信息科學(xué)與工程學(xué)院, b. 山東省網(wǎng)絡(luò)環(huán)境智能計(jì)算技術(shù)重點(diǎn)實(shí)驗(yàn)室, 山東 濟(jì)南 250022)
全鋼子午線(xiàn)輪胎具有安全性能高、抗壓性能好等優(yōu)點(diǎn),比較適合大型運(yùn)輸車(chē)使用,所以在運(yùn)輸業(yè)中應(yīng)用廣泛;但是全鋼子午線(xiàn)輪胎制作工藝復(fù)雜[1],在制作過(guò)程中可能出現(xiàn)鋼絲簾線(xiàn)彎曲、斷開(kāi)及鋼絲簾線(xiàn)散落等輪胎缺陷。這些缺陷會(huì)影響輪胎的質(zhì)量,在輪胎的使用過(guò)程中存在潛在危險(xiǎn),所以在輪胎投入使用前要對(duì)其進(jìn)行嚴(yán)格的質(zhì)量檢查, 以確保輪胎的質(zhì)量。
輪胎簾線(xiàn)彎曲是人們十分關(guān)注的一種缺陷。為此,人們開(kāi)展了相關(guān)研究。文獻(xiàn)[2]中通過(guò)檢測(cè)簾線(xiàn)上點(diǎn)的斜率k,將其與設(shè)置的簾線(xiàn)斜率的閾值k′比較,若k大于閾值k′,則判定該簾線(xiàn)出現(xiàn)彎曲。文獻(xiàn)[3]中采用橫向掃描的方法,計(jì)算每次橫向掃描與簾線(xiàn)的交點(diǎn)個(gè)數(shù), 當(dāng)交點(diǎn)個(gè)數(shù)小于閾值時(shí)判斷為簾線(xiàn)彎曲。文獻(xiàn)[4]中將正常的沒(méi)有簾線(xiàn)彎曲的輪胎圖像作為模板與檢測(cè)圖像進(jìn)行模板匹配,差值越大說(shuō)明簾線(xiàn)彎曲越嚴(yán)重,如此遍歷整張圖像統(tǒng)計(jì)彎曲簾線(xiàn)數(shù)。文獻(xiàn)[5]中采用灰度共生矩陣和直方圖統(tǒng)計(jì)距模板,以及小波變化等方法通過(guò)對(duì)圖像紋理進(jìn)行分析,從而檢測(cè)出輪胎的簾線(xiàn)彎曲缺陷。
文獻(xiàn)[2]、[3]中都采用了類(lèi)似平行于簾線(xiàn)方向穿線(xiàn)的方法,在簾線(xiàn)發(fā)生彎曲處可以檢測(cè)到很多交點(diǎn),但在橫向穿線(xiàn)時(shí)可能出現(xiàn)與簾線(xiàn)重合的情況,從而產(chǎn)生無(wú)數(shù)個(gè)交點(diǎn),造成誤報(bào)。輪胎簾線(xiàn)并不是完全平行的, 而且不同圖像的簾線(xiàn)走向并不類(lèi)似, 所以很不容易找到一條標(biāo)準(zhǔn)的水平簾線(xiàn)。 由于彎曲程度較大的簾線(xiàn)并不一定比彎曲程度較小的簾線(xiàn)變化次數(shù)多, 因此文獻(xiàn)[4]中的方法容易產(chǎn)生誤報(bào)。文獻(xiàn)[5]中對(duì)于處理灰度分布不均勻的輪胎圖像難以統(tǒng)計(jì)彎曲簾線(xiàn)的根數(shù)。針對(duì)這些問(wèn)題,采用垂直輪胎簾線(xiàn)方向穿線(xiàn)的方法,得到穿線(xiàn)與簾線(xiàn)相交的所有交點(diǎn)坐標(biāo),通過(guò)計(jì)算坐標(biāo)之間的關(guān)系得到簾線(xiàn)的斜率,從而判斷輪胎簾線(xiàn)是否彎曲,采用垂直
穿線(xiàn)法可以減小上述辦法造成的一些誤差,而且可以精確地得到每條簾線(xiàn)的彎曲斜率,計(jì)算出彎曲簾線(xiàn)的根數(shù)。
1 基于穿線(xiàn)法的輪胎簾線(xiàn)彎曲缺陷檢測(cè)方法
輪胎整體X射線(xiàn)圖如圖1所示,其中紅色矩形框標(biāo)記位置表示胎體(胎側(cè)、胎肩),在胎體部分會(huì)出現(xiàn)如圖2(a)所示的簾線(xiàn)彎曲的缺陷,針對(duì)這一情況,提出基于穿線(xiàn)法的輪胎簾線(xiàn)彎曲缺陷檢測(cè)方法,該方法對(duì)所處理的輪胎胎側(cè)圖像進(jìn)行垂直簾線(xiàn)方向每隔間距a個(gè)像素進(jìn)行穿線(xiàn),并將穿線(xiàn)與簾線(xiàn)的交點(diǎn)坐標(biāo)保存在數(shù)組中,計(jì)算相鄰坐標(biāo)的斜率k,判斷k是否大于預(yù)先設(shè)定好的閾值k′來(lái)判斷該簾線(xiàn)是否彎曲。而閾值k′的設(shè)定對(duì)于不同輪胎廠家來(lái)說(shuō)是不一定的,如果對(duì)簾線(xiàn)彎曲要求較嚴(yán)苛,這個(gè)閾值可以調(diào)的小一點(diǎn),有輕微彎曲即視為彎曲缺陷;反之則可以設(shè)置大一點(diǎn)。基于穿線(xiàn)法的輪胎簾線(xiàn)彎曲缺陷檢測(cè)方法的流程如圖3所示。
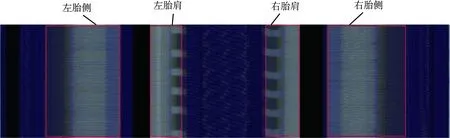
圖1 輪胎成像圖
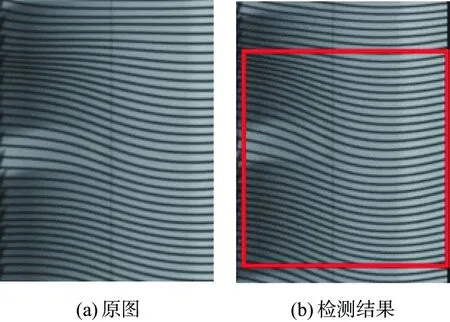
圖2 輪胎簾線(xiàn)彎曲原始圖像及檢測(cè)結(jié)果
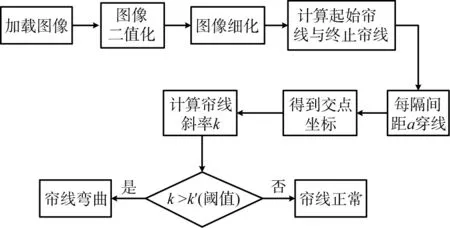
圖3 檢測(cè)流程圖
1.1 Otsu閾值分割法
根據(jù)輪胎圖像成像原理可知,輪胎在成像過(guò)程中,可能會(huì)因?yàn)槭艿降墓庹詹痪鶆蚨鴮?dǎo)致圖像的灰度分布不均勻,出現(xiàn)如圖4(a)所示左側(cè)部分較黑暗、右側(cè)部分相對(duì)明亮的情況,在輪胎的不同部位都會(huì)出現(xiàn)這種情況使得輪胎圖像灰度級(jí)有較大的變化。為了避免圖像灰度級(jí)的這種變化對(duì)后期處理的影響,首先對(duì)輪胎圖像進(jìn)行二值化處理。
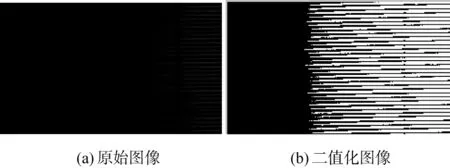
圖4 輪胎胎側(cè)圖像
Otsu算法[6-7]也稱(chēng)最大類(lèi)間方差法,這種算法不受圖像亮度和對(duì)比度的影響,計(jì)算簡(jiǎn)單,所以在本文中選擇用Otsu算法對(duì)輪胎圖像進(jìn)行二值化處理。Otsu算法按圖像的灰度特性,將圖像分成背景和前景2個(gè)部分,當(dāng)Otsu算法取最佳閾值時(shí),背景與前景的差別將達(dá)到一個(gè)最大值從而將圖像二值化。圖4(a)所示的輪胎胎側(cè)圖像經(jīng)過(guò)Otsu算法得到圖4(b)所示的效果。
設(shè)圖像的灰度級(jí)是M,則圖像的灰度范圍為[0,M-1],利用Otsu算法計(jì)算圖像的最佳閾值[8]為
t*=arg max{w0(t)[u0(t)-u]2+w1(t)[u1(t)-u]2},
(1)
式中:t為分割的閾值;w0為背景比例;u0為背景均值;w1為前景比例;u1為前景均值;u為整幅圖像的均值。當(dāng)t*取最大值時(shí),該值就是分割圖像的最佳閾值。
1.2 骨架化算法
圖像細(xì)化[9]是指對(duì)二值化圖像(圖5a)進(jìn)行骨架化的一種操作運(yùn)算。 在穿線(xiàn)的過(guò)程中,為了精確地確定交點(diǎn)的位置, 采用骨架化算法對(duì)圖像進(jìn)行細(xì)化處理。 圖像細(xì)化可以排除其他不必要像素的影響, 使得穿線(xiàn)計(jì)算更加精準(zhǔn)。 在細(xì)化過(guò)程中要注意的問(wèn)題是, 邊緣的每一個(gè)細(xì)節(jié)的變化都可能對(duì)細(xì)化后的圖像造成相當(dāng)大的影響。 細(xì)化后的圖像如圖5(b)所示, 每條連線(xiàn)都是由單一像素組成。
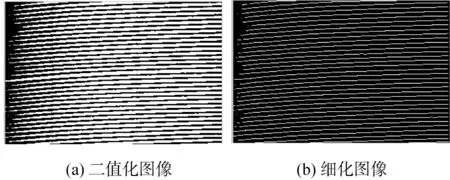
圖5 輪胎圖像細(xì)化圖
輪胎圖像細(xì)化具體步驟如下:
1)將二值化處理得到的輪胎圖像從邊界處的像素點(diǎn)開(kāi)始遍歷。
2)如果該點(diǎn)的鄰域中出現(xiàn)3個(gè)點(diǎn)相鄰的情況,則表明該點(diǎn)是由多個(gè)像素組成,因此可以刪除該點(diǎn)。
3)同理,如果該點(diǎn)的鄰域中有大于3個(gè)點(diǎn)相鄰的情況,則刪除該點(diǎn)。
4)如此遍歷整張圖像得到最終細(xì)化的圖像。
1.3 八鄰域追蹤法
細(xì)化處理后的圖像中白像素為輪胎簾線(xiàn),從圖像高度h1的位置開(kāi)始尋找起始簾線(xiàn),在圖像高度h2的位置開(kāi)始尋找終止簾線(xiàn),如圖6所示。h1、h2可為任意值。

圖6 細(xì)化圖像中的起始與結(jié)束簾線(xiàn)
為了計(jì)算簾線(xiàn)的斜率,需要得到所有簾線(xiàn)的位置信息,獲取每根簾線(xiàn)所有像素坐標(biāo)信息的過(guò)程稱(chēng)為抽線(xiàn)。在抽線(xiàn)的過(guò)程中,細(xì)化后的圖像簾線(xiàn)并不是由單一像素組成,會(huì)有彎曲錯(cuò)位的情況出現(xiàn),為了保證抽出一條完整的簾線(xiàn),本文中用八鄰域追蹤[10-13]法抽線(xiàn)。
八鄰域追蹤法是選擇圖像中的某個(gè)簾線(xiàn)目標(biāo)點(diǎn)作為圖7中的中間點(diǎn)Z,記為開(kāi)始點(diǎn),從這個(gè)點(diǎn)開(kāi)始查看它的八鄰域的點(diǎn),優(yōu)先從右下方45°的位置即Z8位置開(kāi)始尋找是否有下一個(gè)白像素點(diǎn)。如果有白像素點(diǎn),則將Z8記為下一個(gè)目標(biāo)點(diǎn);如果無(wú)白像素點(diǎn),則查找Z5方向和Z3方向,即每次逆時(shí)針45°方向?qū)ふ蚁乱粋€(gè)目標(biāo)點(diǎn),一旦找到,重復(fù)上面的過(guò)程,從而將輪胎起始簾線(xiàn)、終止簾線(xiàn)抽取出來(lái)。
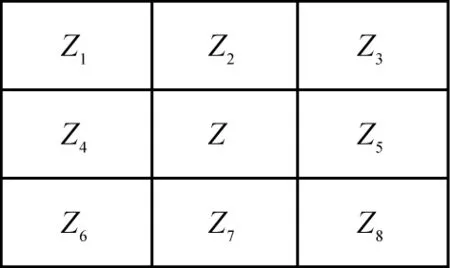
圖7 基于Z點(diǎn)的八鄰域圖
1.4 穿線(xiàn)法
從起始簾線(xiàn)開(kāi)始到終止簾線(xiàn)結(jié)束每隔a個(gè)像素進(jìn)行一次穿線(xiàn),這樣可以保證每次穿線(xiàn)得到的交點(diǎn)個(gè)數(shù)在沒(méi)有斷線(xiàn)的情況下是一樣的,保證相鄰的交點(diǎn)有相當(dāng)大的概率在同一條簾線(xiàn)上,從而可以通過(guò)同一條簾線(xiàn)上的相鄰交點(diǎn)的斜率來(lái)判斷這條簾線(xiàn)是否彎曲。a的選取是任意的,可以根據(jù)圖像的大小任意調(diào)整,但原則上不宜過(guò)大或者過(guò)小,否則不利于計(jì)算簾線(xiàn)的斜率。
受輪胎花紋影響,圖像的灰度分布不均,所以在圖像細(xì)化的時(shí)候可能會(huì)出現(xiàn)如圖8所示的現(xiàn)象,即簾線(xiàn)出現(xiàn)斷開(kāi)和交叉。在這種情況下,穿線(xiàn)法就會(huì)出現(xiàn)每次穿線(xiàn)得到的交點(diǎn)個(gè)數(shù)不相同的情況,進(jìn)而不能保證相鄰2次穿線(xiàn)得到的第n個(gè)交點(diǎn)在同一條簾線(xiàn)上并造成誤判。
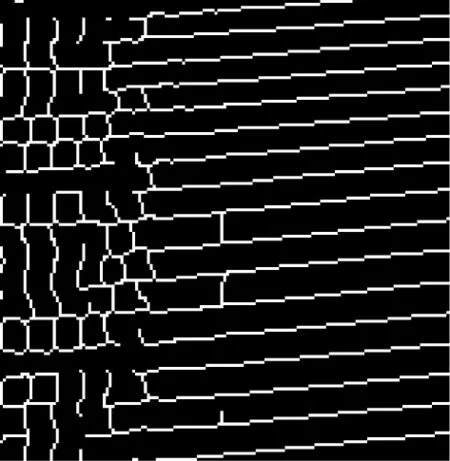
圖8 輪胎圖像細(xì)化后的簾線(xiàn)圖
穿線(xiàn)法具體步驟如下:
1)從起始簾線(xiàn)開(kāi)始向下遍歷到終止簾線(xiàn)結(jié)束每隔a個(gè)像素進(jìn)行一次穿線(xiàn)。
2)當(dāng)遇到白像素時(shí)開(kāi)窗口判斷此點(diǎn)是否為簾線(xiàn)上的點(diǎn)。
3)依次遍歷整張圖得到圖9所示的交點(diǎn)坐標(biāo)。
4)得到所有的交點(diǎn)坐標(biāo)A={(x11,y11),(x12,y12),…,(xmn,ymn)}, (xmn,ymn) 代表第m次穿線(xiàn)與第n條簾線(xiàn)的交點(diǎn)坐標(biāo)。
如圖5(b)所示,細(xì)化后的簾線(xiàn)并不是從頭到尾都是單個(gè)像素,會(huì)有像素的錯(cuò)位,所以在某些地方可能會(huì)出現(xiàn)2個(gè)像素的情況。如果遇到白像素就判斷它為交點(diǎn),則會(huì)導(dǎo)致誤判。
為了避免誤判,獲得準(zhǔn)確的交點(diǎn),采用滑動(dòng)窗口的方法判斷遇到的某個(gè)白像素點(diǎn)是否為簾線(xiàn)上的噪聲。具體做法是:遍歷圖像,當(dāng)遇到白像素時(shí)開(kāi)窗口并將窗口向下滑動(dòng)2次,每次向下滑動(dòng)一個(gè)像素的高度,每次開(kāi)窗口都統(tǒng)計(jì)窗口中的白像素?cái)?shù),選取3次統(tǒng)計(jì)中的最大值,若最大值小于閾值D則該點(diǎn)為雜質(zhì);若大于或等于D則判斷它為簾線(xiàn)上的交點(diǎn),并記錄該點(diǎn)的坐標(biāo)A(x,y),如圖9所示。
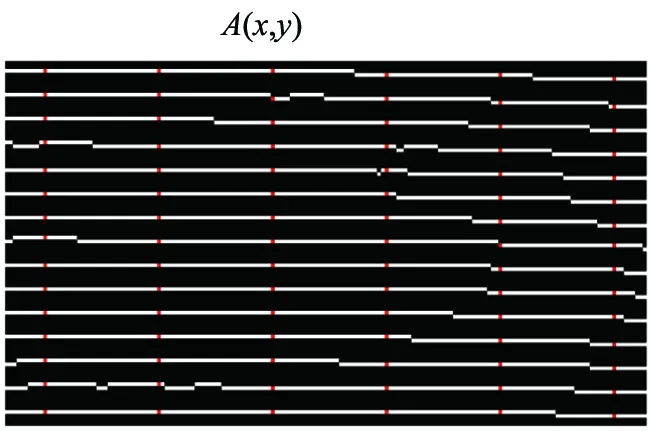
圖9 穿線(xiàn)交點(diǎn)圖
1.5 統(tǒng)計(jì)彎曲簾線(xiàn)
當(dāng)相鄰穿線(xiàn)得到的交點(diǎn)個(gè)數(shù)相同時(shí),由交點(diǎn)坐標(biāo)A={(x11,y11),(x12,y12),…,(xmn,ymn)}根據(jù)式(2)計(jì)算出同一條簾線(xiàn)上相鄰交點(diǎn)的斜率k。
(2)
式中:m代表第m次穿線(xiàn),其大小由圖像的寬度與步長(zhǎng)a的比值決定;n代表第n條簾線(xiàn),n的大小由圖像的簾線(xiàn)數(shù)決定;(xmn,ymn)代表第m次穿線(xiàn)與第n條簾線(xiàn)的交點(diǎn)坐標(biāo)。
當(dāng)斜率k大于已設(shè)定好的閾值k′時(shí)判定簾線(xiàn)彎曲,如此遍歷整張圖像。在實(shí)驗(yàn)時(shí),閾值k′根據(jù)廠家要求及穿線(xiàn)步長(zhǎng)進(jìn)行合理地設(shè)定。當(dāng)步長(zhǎng)a較大時(shí),閾值k′可相對(duì)的調(diào)小一點(diǎn);當(dāng)步長(zhǎng)a較小時(shí)閾值k′可相對(duì)的調(diào)大一點(diǎn)。
通過(guò)計(jì)算圖像中所有的交點(diǎn)坐標(biāo),得到所有的簾線(xiàn)斜率。如果簾線(xiàn)斜率大于閾值k′,則判定簾線(xiàn)彎曲,統(tǒng)計(jì)同一區(qū)域內(nèi)彎曲的簾線(xiàn)條數(shù),將同一區(qū)域內(nèi)的彎曲簾線(xiàn)用一個(gè)矩形框標(biāo)記
2 實(shí)驗(yàn)結(jié)果與分析
本文中采用查準(zhǔn)率P、查全率R2個(gè)指標(biāo)衡量檢測(cè)效率。
查準(zhǔn)率和查全率分別定義為
(3)
(4)
式中:Ttp表示真正例數(shù),即含有簾線(xiàn)彎曲缺陷的圖像被檢測(cè)為缺陷圖像的數(shù)量;Ffp表示假正例數(shù),即正常圖像被檢測(cè)為 缺陷圖像的數(shù)量;Nfn表示假反例數(shù),即含有簾線(xiàn)彎曲缺陷的圖像被檢測(cè)為正常圖像的數(shù)量。
采用文獻(xiàn)[1]、[2]中的方法與本文中的方法對(duì)10種不同紋理的150幅輪胎圖像進(jìn)行輪胎簾線(xiàn)彎曲缺陷檢測(cè),表1所示為這3種方法的檢測(cè)效率比較。由表中可以看出,3種方法的查準(zhǔn)率差別較小,但本文中的方法比文獻(xiàn)[1]、[2]中的方法具有更高的查全率。
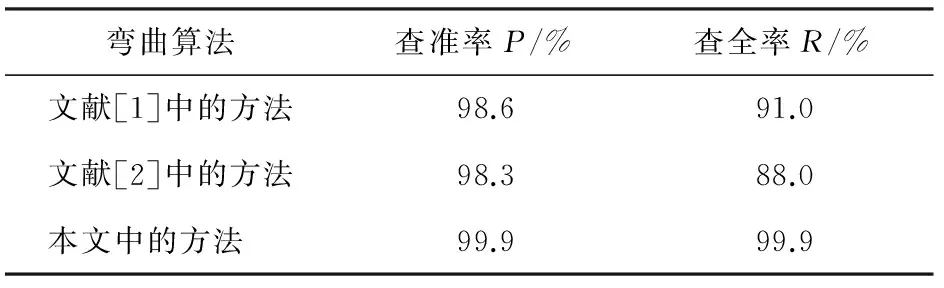
表1 結(jié)果比較
穿線(xiàn)法檢測(cè)簾線(xiàn)彎曲缺陷的優(yōu)點(diǎn)如下:1)在判斷彎曲的同時(shí)可以給出彎曲簾線(xiàn)的具體位置信息,從而可以將彎曲部分標(biāo)記出來(lái),如圖10所示為4幅彎曲檢測(cè)標(biāo)記結(jié)果; 2)計(jì)算復(fù)雜度小,運(yùn)行速度能滿(mǎn)足工業(yè)生產(chǎn)需求。
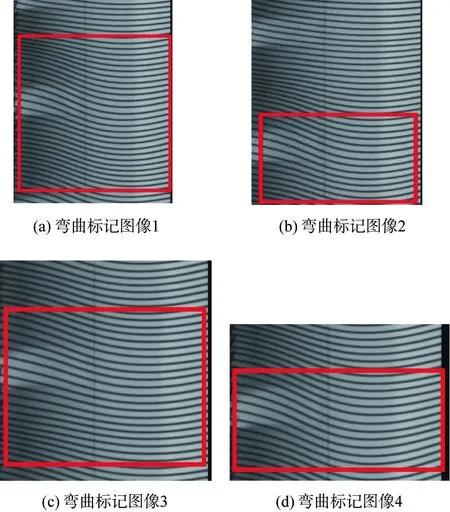
圖10 采用本文中的方法檢測(cè)輪胎簾線(xiàn)彎曲的結(jié)果
3 結(jié)論
本文中針對(duì)全鋼子午線(xiàn)輪胎中存在的鋼絲彎曲缺陷, 提出一種基于穿線(xiàn)法的輪胎簾線(xiàn)彎曲缺陷檢測(cè)方法。該方法首先對(duì)輪胎胎側(cè)圖像進(jìn)行細(xì)化處理,然后對(duì)細(xì)化圖像采用垂直簾線(xiàn)方向穿線(xiàn)的方法進(jìn)行簾線(xiàn)彎曲檢測(cè),即每隔間距a穿線(xiàn)得到穿線(xiàn)與簾線(xiàn)的交點(diǎn)坐標(biāo)矩陣,通過(guò)相鄰2列的簾線(xiàn)交點(diǎn)坐標(biāo)計(jì)算得到每條簾線(xiàn)斜率,當(dāng)簾線(xiàn)斜率大于設(shè)置的閾值k′時(shí)判斷該簾線(xiàn)彎曲。穿線(xiàn)測(cè)量簾線(xiàn)彎曲的方法計(jì)算復(fù)雜程度低,實(shí)驗(yàn)結(jié)果證明穿線(xiàn)法對(duì)于簾線(xiàn)彎曲缺陷具有較高的檢測(cè)效率。當(dāng)輪胎簾線(xiàn)出現(xiàn)斷線(xiàn)或圖像細(xì)化出現(xiàn)差錯(cuò)時(shí),本文中的方法可能會(huì)出現(xiàn)誤報(bào),所以后續(xù)工作將就該問(wèn)題對(duì)穿線(xiàn)法進(jìn)行進(jìn)一步的改進(jìn)。
參考文獻(xiàn):
猜你喜歡
中國(guó)設(shè)備工程(2022年12期)2022-07-11 04:33:00
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:36
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:34
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:50
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:48
