C-EPS在某新能源客車上的匹配應用
2018-07-04 07:25:24楊情操鄒小俊張湯赟
汽車電器 2018年6期
楊情操,朱 曉,鄒小俊,張湯赟,葉 進
(南京依維柯汽車有限公司,江蘇 南京 211806)
電動助力轉向系統(Electronic Power Steering,簡稱EPS)是一種用于輔助駕駛員改變或保持汽車行駛方向的專門機構,已廣泛使用在包括傳統能源和新能源的各種類型乘用車上[1]。傳統能源客車裝有發動機,有通過發動機驅動的轉向泵存在,一般采用液壓助力轉向系統(Hydraulic Power Steering,簡稱HPS),HPS引起的燃油消耗約占整車總燃油消耗的3%~5%[2],即使采用節能技術使重型商用車HPS的能耗降低20%,其引起的燃油消耗量依然占整車總燃油消耗的2.4%~4%[3]。
新能源客車的總質量較大,且沒有傳統發動機,一般采用電動液壓助力轉向系統(Electronic-Hydraulic Powerassisted System,簡稱EHPS)[4]。EHPS需要先將電能轉換為動能,再將動能轉換為壓力,驅動傳統液壓助力轉向系統工作。轉向系統對響應靈敏度要求較高,傳統轉向系統只能依靠駕駛員的操作實現穩定控制,而通常駕駛員的反應遲滯超過0.5 s[5],其中既有能量轉換中的能源損失,又有因能源轉換中的時間滯后,一般為解決時間滯后問題,有常流時轉向泵或儲能裝置兩種模式,這會造成能源損失加劇。在新能源客車上匹配應用EPS,與EHPS相比,將會降低能耗和提高響應速度。本文對某新能源客車采用EPS系統,從選型、布置、實施及驗證等方面進行了相關分析。
1 新能源客車EPS的選型設計
目前,EPS根據助力位置不同,其結構形式也分為轉向管柱助力形式(C-EPS)、小齒輪助力形式(P-EPS)、齒條助力形式(R-EPS)等幾種[6],其技術狀態、特性見表1。

表1 不同種類EPS特性
本文所述新能源客車采用前雙擺臂扭桿獨立懸架結構,輸入齒輪及輸出齒條處空間較為緊湊,布置P-EPS及R-EPS空間不足,且整車參數屬于輕載車型,如某新能源客車整車參數見表2,故選擇C-EPS結構。
C-EPS原理為:當操縱轉向盤時,裝在轉向盤軸上的傳感器測出轉向軸上的轉角信號,該信號與車速信號同時輸入到電子控制單元。電子控制單元根據這些輸入信號,確定助力轉矩的方向和大小,然后將這些數據信息傳遞到控制器中控制電機的電流大小以及轉動方向,從而調整轉向輔力的大小達到最佳工況。電動機的轉矩通過減速機構減速增矩后,加在汽車的轉向管柱上,使之得到一個與汽車工況相適應的轉向輔助力。轉向輔助力最終傳遞到操縱機構,使左右車輪進行轉向,此時駕駛員在轉動轉向盤時就會發現自身不需要很大的力就可以使之發生轉向[7]。
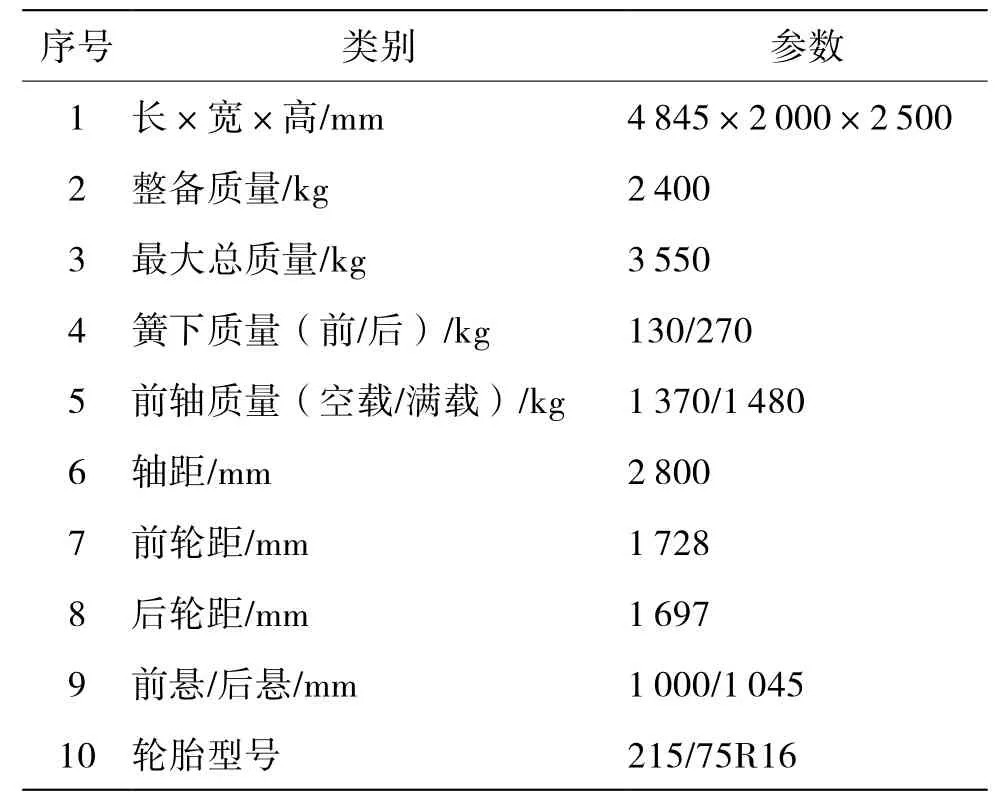
表2 某新能源客車整車參數表
利用半經驗公式來計算汽車在路面上的原地轉向力矩MR,單位Nmm。

式中:f——輪胎與地面間滑動阻力系數,一般取0.7;G——轉向軸負荷,N,該車轉向軸滿載載荷為1 480 kg,即為14 504 N;P——輪胎氣壓,MPa,該車輪胎氣壓為0.45 MPa。
將以上的數據代入(1)式中,得MR=607 578 Nmm。
該新能源客車采用齒輪齒條式機械轉向器,在不帶助力系統時,作用在轉向盤上的手力為Fh,單位N。

式中:Ll——轉向梯形臂長;Dsw——轉向盤直徑;iw——轉向器角傳動比;η+——轉向器正效率。
將以上的數據代入(2)式中,得Fh為75 N。
2 新能源C-EPS布置方案
C-EPS由傳感器 、蝸輪、蝸桿、蝸輪軸、輸入軸、減速殼體 、轉向管柱、電機、控制器ECU等組成。采用有刷電機,非接觸式扭矩傳感器及轉角傳感器,具備自動回正功能和自動間隙補償功能,工作溫度在-40~85 ℃之間,其布置如圖1所示。
3 新能源客車C-EPS參數選擇及設定
C-EPS相關參數見表3,C-EPS電氣性能見表4,C-EPS蝸輪蝸桿減速機構結構如圖2所示,其相關參數見表5。
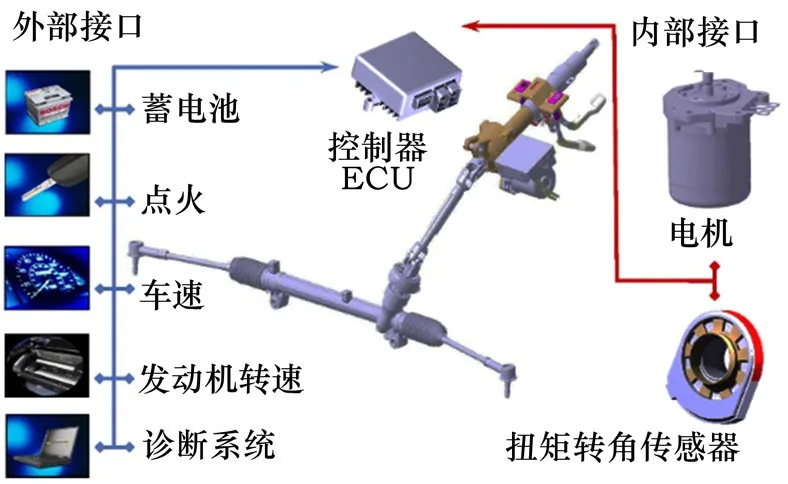
圖1 C-EPS布置示意圖

表3 C-EPS相關參數

表4 C-EPS電氣性能
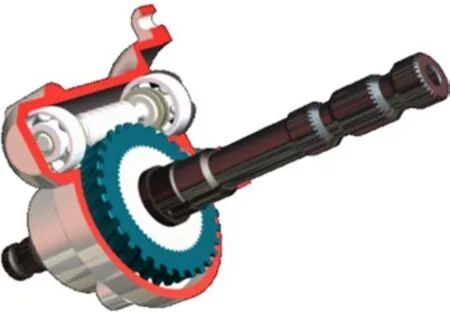
圖2 蝸輪蝸桿減速機構結構
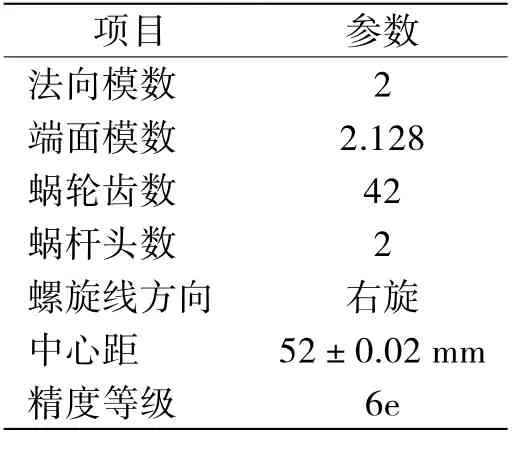
表5 蝸輪蝸桿相關參數
蝸輪軸、輸入軸限位角度為±7°,扭桿扭轉剛度為(1.7~1.8)Nm/(°),實際工作角度為±4°,輸入軸剛度曲線如圖3所示。

圖3 輸入軸剛度曲線
4 新能源客車C-EPS試驗驗證
在裝配C-EPS的新能源客車上進行相關試驗,在轉向盤上安裝測力計,對EHPS及C-EPS兩種狀態的轉向盤力矩進行測量,對比結果見表6。從表6可知,采用C-EPS后,轉向盤上力矩明顯降低。
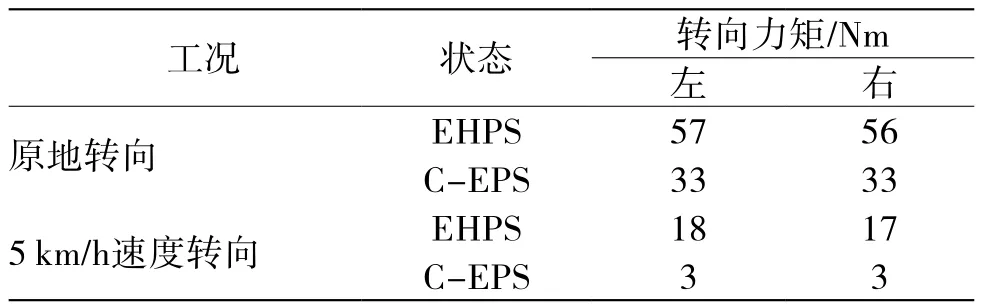
表6 EHPS及C-EPS兩種狀態力矩對比
對安裝C-EPS后新能源客車相關性能目標符合性進行分析,結果見表7。
從表7可知,經評估,原地最大轉向操作力矩、機械助力管柱傳動效率、總成助力對稱性等參數達到設定目標值。
5 結語
通過C-EPS在某新能源客車上的布置匹配應用,可知采用C-EPS電動助力轉向系統,轉向力矩等能達到甚至優于EHPS水平,原地最大轉向操作力矩、機械助力管柱傳動效率、總成助力對稱性等參數達到設定目標值,為后續相關車型開發提供了借鑒。

表7 C-EPS性能目標符合狀態
[1] 胡宗舉.乘用車助力轉向系統控制器的設計與研究[D].武漢:武漢理工大學,2014.
[2] 李一染,權龍.液壓轉向助力系統能耗特性的分析和比較[J].工程設計學報,2002,9(3):131-135.
[3] 宋海兵,江浩斌,唐斌,等.商用車轉向系統的操控性與能耗分析及展望[J].武漢:武漢理工大學學報(信息與管理工程版),2015(10):580-584.
[4] 譚心,陳超,方桂花,等.汽車電動液壓助力轉向系統的仿真分析[J].液壓與氣動,2013,l(1):15-19.
[5] S.-S. Youa,Y.-H.Chai. Multi-objective control synthesis:an application to 4WS passenger vehicles[J].Mechatronics,1999:363-390.
[6] 裴學杰.電動助力轉向系統助力特性研究[D].太原:中北大學,2015.
[7] 車明霞.EPS方向機機構的設計研發[D].武漢:武漢理工大學,2012.
猜你喜歡
英語世界(2022年9期)2022-10-18 01:11:18
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
金橋(2020年9期)2020-10-27 01:59:44
中學生數理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
家庭影院技術(2017年9期)2017-09-26 03:41:45
商周刊(2017年17期)2017-09-08 13:08:58
瞭望東方周刊(2016年40期)2016-11-02 18:30:31
風能(2015年4期)2015-02-27 10:14:36