MIMU/CSAC/BDS組合導航微系統的硬件設計*
2018-07-05 09:21:58陳德潘樊龍江孫昭行
航天控制 2018年3期
陳德潘 陳 帥 樊龍江 孫昭行
南京理工大學自動化學院,南京210094
全球衛星導航系統產業的迅猛發展改變了人們的生活方式[1],中國自主開發研制的北斗衛星導航系統在通信系統、應急指揮和交通管理等領域均發揮了巨大的作用。然而,衛星導航系統存在的固有缺陷,使其在室內、地下和水下等物理阻礙環境以及電子對抗等復雜電磁環境下的服務性能嚴重下降,甚至無法正常工作。因此,未來定位導航授時(Positioning,Navigation and Timing)應用技術發展的重點是如何實現具備抗干擾性強和精度高的PNT信息服務[2]。
最近幾年,國內開展了以微機電技術(Micro-Electro-Mechanical Systems,MEMS)為核心的微慣性測量單元(MIMU)和芯片原子鐘(CSAC)的研究,其體積小、重量輕、成本低、功耗低、可靠性高和壽命長等優勢,為微型化的組合導航系統的實現提供了可能[3-4]。
在此背景下,MIMU的輸出信息經過解算可實時獲取載體的位置和速度信息,但是無法克服自身偏移誤差隨時間積累的缺陷[5],需要北斗導航模塊進行校正。CSAC存在頻率偏移問題,導致其輸出結果偏離準確時間,因此需要北斗導航模塊輸出的1PPS(Pulse Per Second)修正誤差,同時提高北斗導航模塊授時精度[6]。本文設計了一種以MIMU、CSAC和BDS導航模塊為構架的組合導航微系統。充分分析了三者的接口設計與配置,三者的一體化設計提高了系統的可靠性和抗干擾能力。實驗表明:MIMU/CSAC/ BDS的組合導航微系統在真實跑車環境和高動態仿真環境下,可以正常工作,并輸出精度較高的性能指標。
1 MIMU/CSAC/BDS組合導航微系統的總體設計方案
MIMU/CSAC/BDS的組合導航微系統總體方案設計如圖1所示。主要從以下4個部分介紹:
1)微慣導模塊:微慣導模塊利用MIMU中陀螺測得的角速率、加速度計輸出的比力經過誤差補償后,通過串口發送給數據處理單元,采用導航算法解算獲取位置、速度、加速度和姿態等導航信息。最后將數據傳送給組合導航模塊、通信接口模塊和慣性輔助模塊;
2)CSAC模塊:CSAC可提供精確的時鐘信息。CSAC和處理器通過串口通信,串口通信功能包括查詢測量數據、頻率調節及查詢、設置/清除操作狀態、芯片原子鐘自動同步和1PPS馴服設置等;
3)BDS定位導航模塊:BDS定位導航模塊需要獲取衛星信號相關器中鎖存的多普勒頻移信息、載波相位信息和導航電文等信息,通過解析得到星歷、偽距和偽距率等信息,計算出當前載體的位置、速度以及時間信息;
4)組合導航模塊:組合導航微系統中,CSAC提供精準的時間基準,MIMU經慣導解算得到的載體位置、速度信息與北斗衛星的位置、速度信息進行計算得到載體的偽距、偽距率;與此同時北斗定位導航模塊解算可直接得到偽距、偽距率,將兩者的信息進行基于偽距、偽距率差的卡爾曼組合濾波,得到載體的位置、速度及姿態誤差,對系統進行修正,得到高精度的導航定位信息。
2 MIMU/CSAC/BDS組合導航微系統的硬件設計
組合導航微系統的硬件結構是由微慣性測量單元、芯片原子鐘模塊和DSP+ FPGA為核心的北斗導航模塊組成。要實現組合導航微系統的功能,必須確定各個模塊與DSP+FPGA之間的配置與接口設計,充分利用各個模塊的資源。組合導航微系統的硬件設計結構圖如圖2所示。
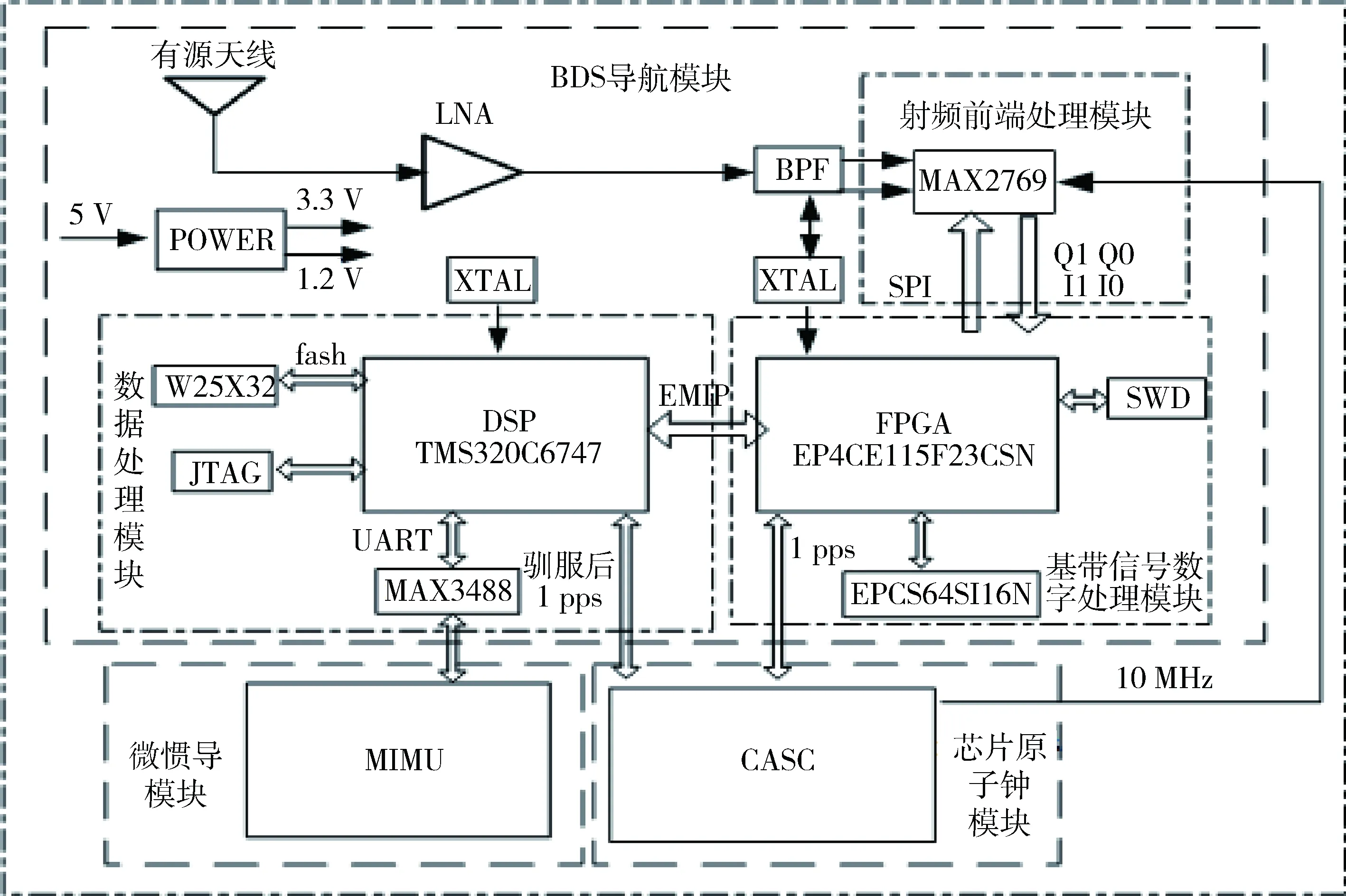
圖2 組合導航微系統硬件設計結構圖
2.1 MIMU的硬件特征與配置設計
本系統采用的MIMU為本團隊自主研發。MIMU的設計由4個部分組成,分別為慣性傳感器模塊、溫度傳感器模塊、數字處理單元和減振系統。其中,慣性傳感器模塊由三軸MEMS加速度傳感器芯片和三軸MEMS陀螺儀傳感器芯片兩兩正交組成,完成載體坐標系軸的加速度及角速度測量。同時,在慣性器件ASIC(專用集成電路)上集成溫度傳感器,可以測量環境溫度,以用于對每個軸的零偏和標度進行溫度補償,同時對兩兩軸向間的交叉耦合也進行補償,提高其綜合測量精度。數字處理單元中的3個角速度通道的輸出、3個加速度通道的輸出、溫度信號及補償信號用來進行誤差補償、數字濾波、劃船效應和圓錐效應處理,以此提高慣性器件的使用精度。而減振系統可以保證良好的防振動和沖擊的能力。
MIMU提供由微陀螺儀和微加速度計測量出的角速率信息和加速度信息,其采用J30J-15ZKP型矩形連接器,MIMU與處理器的連接圖如圖3所示。
MIMU對外通信采用RS-422 接口,輸出的最大波特率為921600bps,數據更新頻率最大為1000Hz,工作電壓為5V,陀螺儀的零偏穩定性≤10°,加速度計的零偏穩定性≤0.1mg。通過RS-422接口將數據發出,經DSP處理芯片,進行組合導航信息融合。
2.2 CSAC的硬件特征與配置設計
CSAC可為組合導航微系統提供準確的時鐘基準。本系統采用的XHTF1040型CPT微型原子鐘,該原子鐘具有尺寸微型化45×36×15 (mm3) 、+3.3V低電壓供電且功耗低等特點。其外秒同步功能:1PPS同步精度優于50ns;外秒馴服精度≤5E-12(馴服1天后24小時平均值);保持性能≤5us(馴服1天后24小時保持時差)。CSAC頻率準確度比普通的溫補型晶振的頻率準確度高出3~4個數量級,因此當采用CSAC作為衛星信號接收機的時鐘信息源時,可認定接收機的時鐘頻率在相當長的一段時間里保持穩定的狀態[7]。因為北斗衛星接收機每一次解算出來的鐘差都是相互獨立的,因此,可以把一段時間內接收機正常定位時獲取的鐘差信息記錄成歷史數據,根據記錄的歷史鐘差信息建立鐘差模型,并對后續一段時間內的鐘差信息做出準確的預測。北斗衛星接收機的時鐘Tbd與系統時Ts的關系可以寫成:
Tbd-Ts=α0+α1(Ts-t0)+α2(Ts-t0)2
(1)
(2)
(3)
上式可以寫成:
這下,馱子與常愛蘭才反應過來,然后趕緊把李老師迎進屋子里。屋子里的凌亂是李老師能夠想象得到的。在農村,家里收拾得很干凈的不太有,更何況是彈棉花的人家,更何況是外鄉人。
Tbd-Ts=Rα
(4)
其中:α0,α1,α2分別為相對偏差、鐘速和鐘漂信息,t0為參考歷元信息。
(5)
CSAC提供的10MHz頻率,結合通過天線接收北斗衛星1561.098MHz的載波頻率,經過濾波和放大后,再通過混頻下變頻成中頻信號,最后由A/D芯片采樣,將模擬中頻信號離散化成數字中頻信號給FPGA處理。中頻信號產生流程圖如圖4所示。
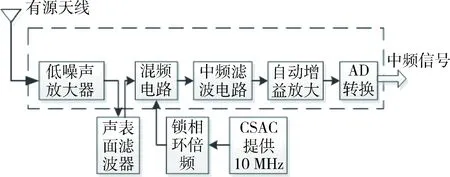
圖4 中頻信號產生流程圖
芯片原子鐘模塊能夠提供精準的1pps秒脈沖和精準的時鐘信號,經過馴服后,可獨立提供精準的1pps秒脈沖供導航處理器使用,實現獨立授時功能[8]。該模塊與導航模塊數據處理單元的DSP數據通信采用RS232串口進行數據傳輸,DSP通過讀取RS232中的數據可以實時觀測芯片原子鐘的溫度、馴服狀態及鎖定時間等狀態;衛星導航模塊定位后會輸出一個基準的秒脈沖,將該秒脈沖輸出給芯片原子鐘的“1pps_IN”管腳,引入后來馴服原子鐘的1pps秒脈沖;芯片原子鐘馴服后輸出的1pps秒脈沖經過中斷的方式被DSP讀取,來輔助衛星導航模塊,提高時間精度;芯片原子鐘提供一個精準的HCMOS電平信號,將該信號接入到射頻單元與FPGA單元代替原有的溫補型晶振,能夠提供更精準的頻率,減少了衛星導航模塊本身造成的鐘差。芯片原子鐘與處理器連接圖如圖5所示。
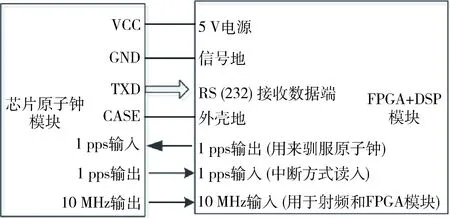
圖5 芯片原子鐘與處理器連接圖
本系統射頻模塊選用Maxim Integrated公司的MAX2769[9]。對MAX2769進行初始化配置,設置NDIV值為2491,RDIV值為16,進行中心頻率推算:
(6)
fB1=1561.098MHz
(7)
fLO=NDIV×f=2491f
(8)
fbdcen=1561.098MHz-2491f=4.223MHz
(9)
其中,fCSAC表示原子鐘頻率,fB1表示B1載波頻率,fbdcen表示中心頻率。
2.3 北斗導航模塊的硬件特征與配置設計
北斗導航模塊是基于DSP+FPGA的,其主要硬件部分包括射頻前端處理模塊、基帶信號數字處理模塊和定位解算模塊。射頻前端處理模塊對衛星信號進行放大、變頻、濾波和模數轉換,得到數字中頻信號;基帶信號數字處理模塊對數字中頻信號進行捕獲、跟蹤、位同步和幀同步處理,得到導航測量值和導航電文;定位解算模塊利用導航測量值和導航電文進行定位解算,最終得到用戶的位置信息,獲取定位觀測值。
北斗系統射頻模塊選用Maxim Integrated公司的MAX2769,MAX2769芯片內集成的Σ-ΔN分頻頻率合成器可實現±40Hz精度的中頻編程,從而能夠與主機系統所提供的任意基準或晶體頻率配合工作,使得北斗系統射頻模塊僅需少量外部元件,即可構建完整的低成本接收機方案,符合當前低功耗、高集成度、小尺寸、低價格的發展潮流。
EP4CE115F23C8N是Altera公司Cyclone系列的第四代產品[10],采用臺灣半導體生產公司(TSMC)的60nm低功耗(LP)工藝技術。其具有低功耗、低成本和高性能的特點。FPGA利用配置的I/O口讀取MAX2769處理過的數字中頻信號,并將信號傳送到通道相關器進行處理,累加器將I/Q信號進行鎖存并觸發累加中斷;TIC鎖存器鎖存相關量并觸發TIC中斷,同時輸出1PPS秒脈沖。整體結構設計分為:時鐘時基發生器、數據重采樣模塊、相互獨立的通道模塊、寄存器組模塊等。FPGA中采用多通道并行接收衛星信號,通道中的相關器的每個通道占用資源為750LE,與其他不倍頻純使用LE實現同類功能的相關器代碼相比,優化程度很高。FPGA內部相關器結構圖如圖6所示。
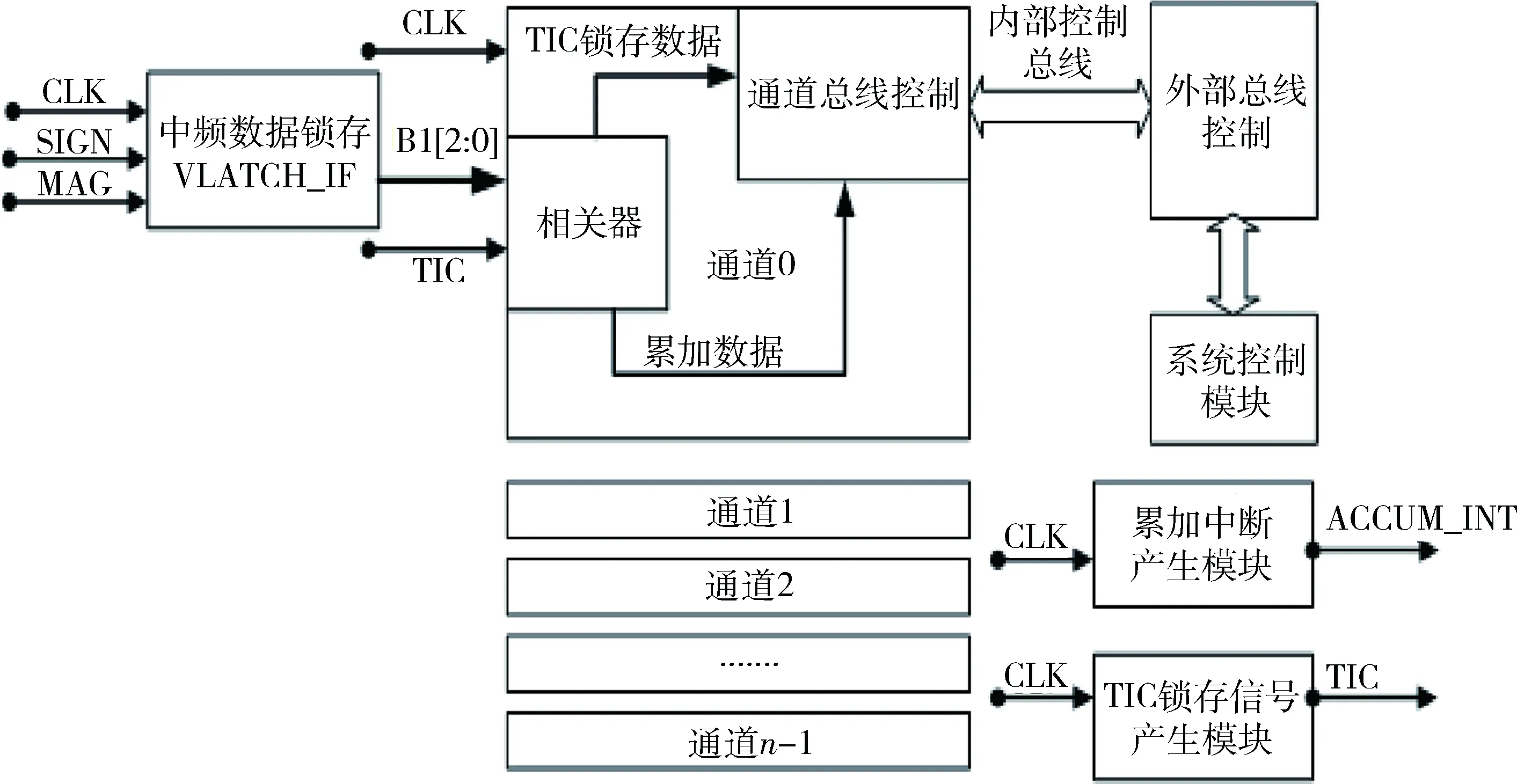
圖6 FPGA內部相關器結構圖
定位解算及信息融合處模塊采用的是TI(Texas Instruments)公司的定點/浮點數字信號處理器TMS320C6747[11],主頻高達300MHz,擁有豐富的外圍模塊,外形尺寸僅為17mm×17mm。它的內核使用了兩級緩存結構,分別是32KB一級程序緩存(LIP)和32KB一級數據緩存(LID);256KB二級程序或數據存儲器(L2RAM)。同時第二級(L2)還可以訪問一個1024KB集成ROM。當DSP進行導航解算時,FPGA剝離數字中頻信號包含多普勒頻移在內的載波和偽碼,DSP讀取導航電文。北斗導航模塊信號流程圖如圖7所示。

圖7 北斗導航模塊信息流程圖
DSP的EMIFA接口通過數據總線和地址總線與FPGA配置好的數據總線和地址總線相連,其中數據總線長度為16位,使用數據線EMA_D [15:0]與FPGA的D[15:0]連接。地址總線長度為12位,由于每次讀寫數據的長度為2個字節,在地址總線中最低位恒為0,DSP使用地址線EMA_A[11:1] 與FPGA的A[11:1]連接。地址中高5位產生通道選擇信號,低6位是每個通道內寄存器的偏移地址。DSP與FPGA總線連接圖如圖8所示。
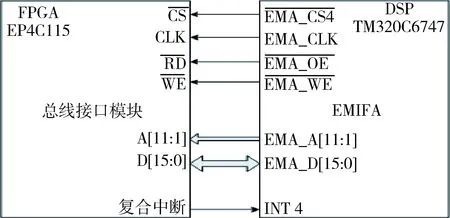
圖8 DSP與FPGA總線連接圖
3 MIMU/CSAC/BDS組合導航微系統的底層硬件驅動設計
組合導航微系統的處理器底層驅動設計主要包含系統時鐘驅動程序設計和中斷驅動程序設計。
北斗接收機和CSAC能夠輸出高精度的整秒時間,但時間輸出頻率比較低,不能滿足組合導航算法中對精確時間的需求。DSP的定時器模塊無法進行時間修正,本系統結合CSAC精確的時間信息、定位解算出的時鐘鐘差信息和DSP本身的定時器,設計了一個高精度的系統時間模塊,其工作流程如圖9所示。接收機僅在定位解算后,利用自身的衛星時間和CSAC馴服后的整秒時間,計算得到定時器時間的誤差量用來修正定時器時間。

圖9 系統時間模塊工作流程圖
組合導航微系統中斷設置如表1所示。

表1 中斷設置表
DSP的中斷方式基本利用事件觸發,為保證組合導航微系統的實時性,對性能要求高的功能模塊均采用中斷服務子程序的方式進行處理。
4 實驗測試
為了驗證本原理樣機的可行性,將原理樣機各部分調試完成后,與軟件配合進行地面跑車(低動態)實驗和高動態模擬器實驗。
跑車實驗選擇在南京市開發區路段進行。出發點緯度是32.0273629°,經度118.8957339°,高度是13.537m。在出發點通過尋北儀測得慣導前向與北向的夾角為150°,則初始偏航角設置為150°。采用高精度組合導航系統作為基準。在實驗中使用監控軟件實時采集系統輸出的信息并存入文件,并對實驗數據進行處理分析,比較得出誤差。實驗結果如圖10~11所示。
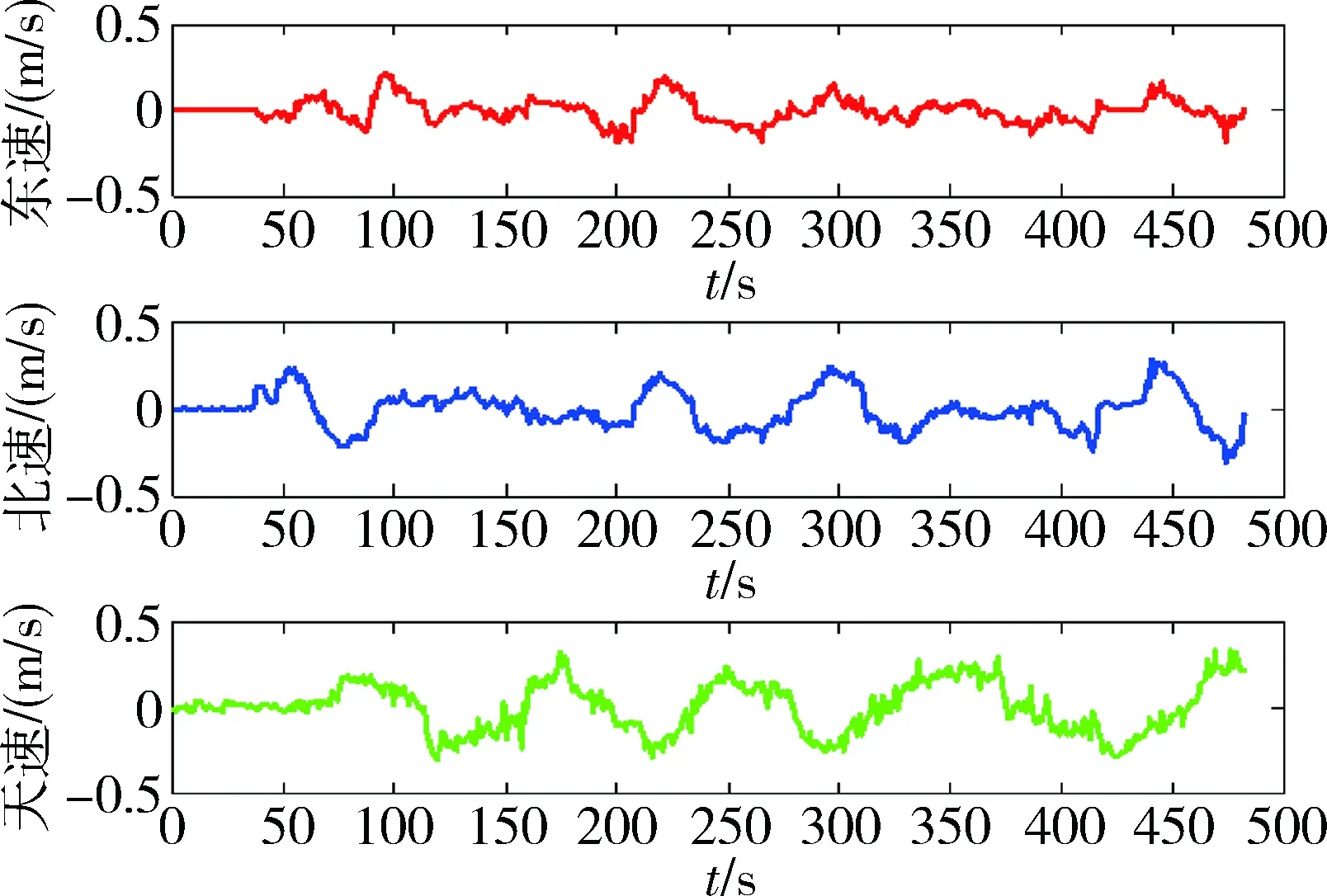
圖10 組合導航微系統速度誤差
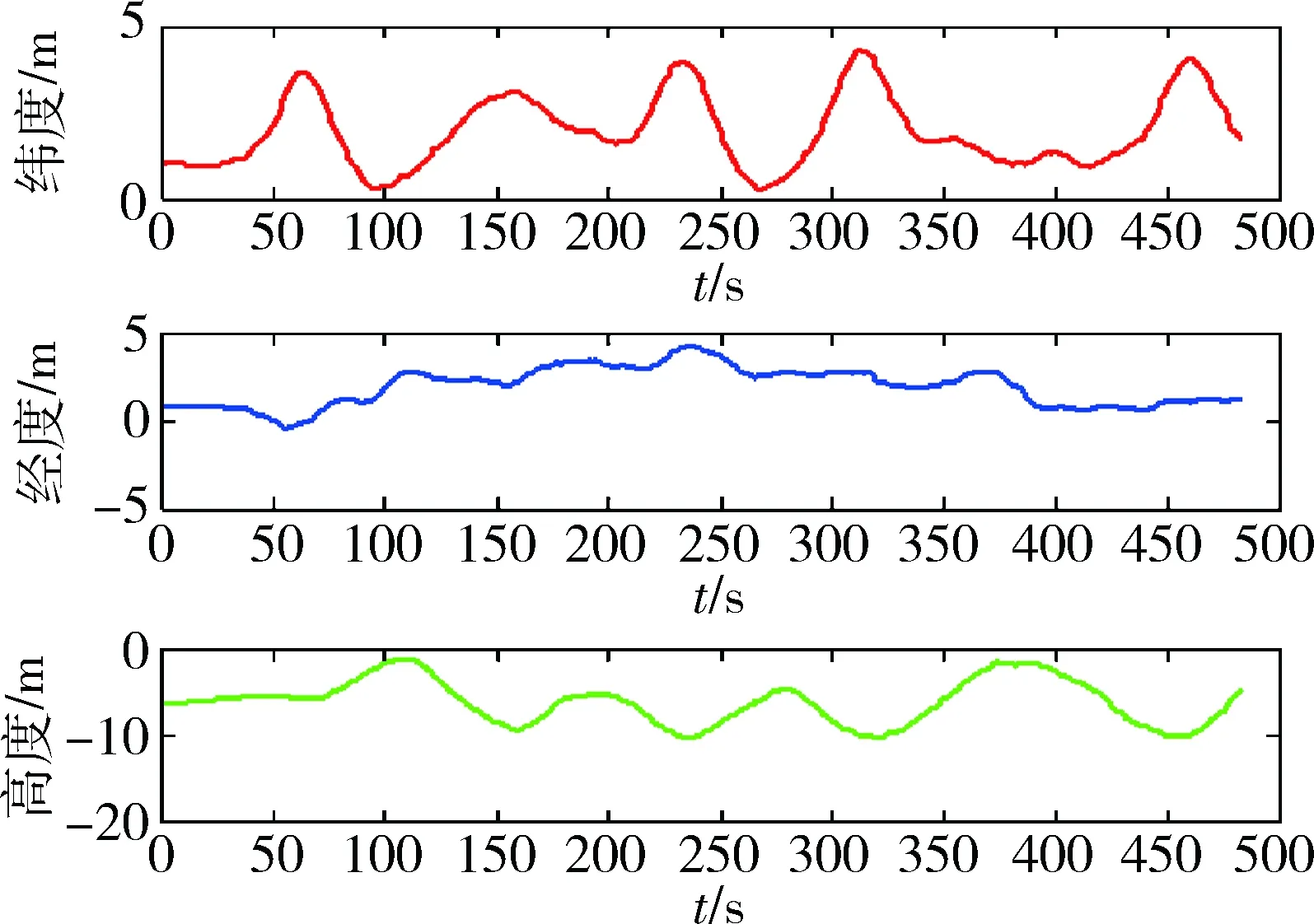
圖11 組合導航微系統位置誤差
從圖10~11中得出,緯度誤差2.99m(1σ),經度誤差3.05m(1σ),高度誤差8.72m(1σ),東向速度誤差0.08m/s(1σ),北向速度誤差0.12m/s(1σ),天向速度誤差0.15m/s(1σ)。跑車實驗結果表明,組合導航微系統在真實的環境下能為載體提供良好的定位信息,符合設計要求。
高動態模擬器實驗采用衛星導航信號模擬器仿真載體的高動態飛行軌跡,并基于組合導航微系統中使用的接收機搭建半實物仿真系統,軌跡設定為大圓軌跡,半徑為600km。載體不斷作加速和減速運動,速度和加速度按正弦變化。最大速度為8km/s,最大加速度為50g。仿真軌跡圖、線速度和線加速度如圖12~13所示。

圖12 仿真軌跡圖
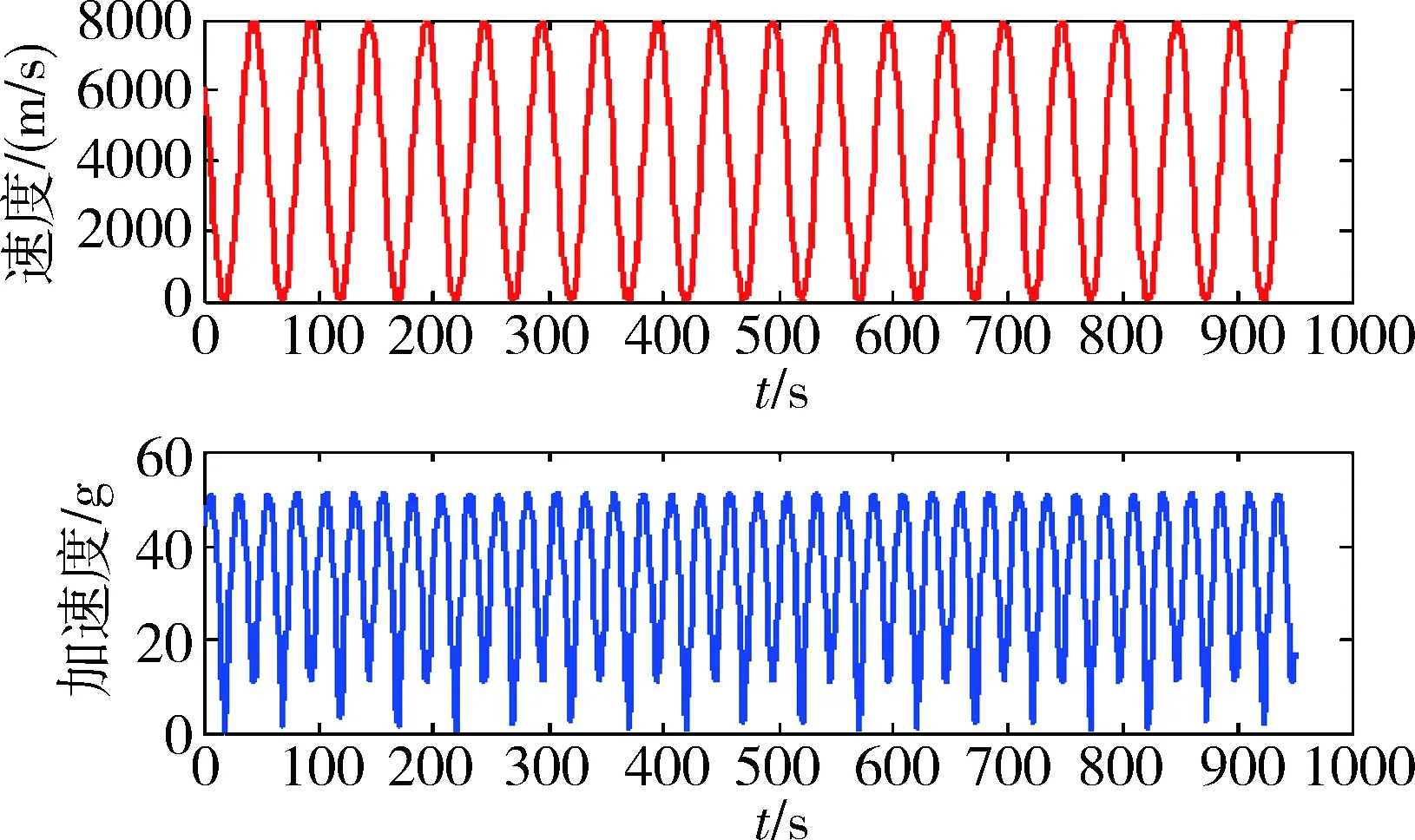
圖13 軌跡線速度與加速度圖
實驗結果如圖14~15所示,與原始軌跡比較,組合導航微系統的緯度誤差為0.48m(1σ),經度誤差為1.07m(1σ),高度誤差為2.25m(1σ),東向速度誤差為0.32m/s(1σ),北向速度誤差為0.32m/s(1σ),天速誤差為0.11m/s(1σ)。實驗結果表明組合導航微系統在高動態環境下性能指標良好,符合設計要求。

圖14 組合導航微系統速度誤差

圖15 組合導航微系統位置誤差
5 結論
提出了1種MIMU/CSAC/BDS組合導航微系統的設計方案,并由此完成了組合導航微系統的硬件和底層驅動設計與實現工作。該組合導航微系統具有功耗低和體積小等特點,易于載體安裝。經過多次測試,實驗表明:組合導航微系統能夠為用戶在真實環境下提供準確的位置和速度信息。此外,組合導航微系統具有良好的跟蹤性能與導航精度,在高動態環境下亦可提供準確的位置和速度信息。本文設計的組合導航微系統應用場景以軍民兩用為背景,在無人機車和衛星、火箭、導彈等高動態載體相關場景下具有良好的發展前景。
參 考 文 獻
[1] 李旭,李為民.美俄軍事衛星系統發展現狀與趨勢[J]. 國防科技,2015(2):43-48. (Li Xu,Li Weimin. Development Status and Trend of American and Russian Military Satellite Systems [J]. Defence Technology, 2015(2):43-48.)
[2] 江城,張嶸.美國Micro-PNT發展綜述[J].中國衛星導航學術年會,2015. (Jiang Cheng, Zhang Rong. The General Development of the United States Micro-PNT [J]. China Satellite Navigation Conference, 2015.)
[3] 劉鈍,甄衛民,張風國,歐明.PNT系統體系架構與PNT新技術發展研究[J]. 全球定位系統, 2015(2): 48-52. (Liu Dun, Zhen Weimin, Zhang Fengguo , Ou Ming. PNT System Architecture and PNT Study on the Development of New Technologies [J]. Global Positioning System, 2015(2): 48-52.)
[4] 楊元喜.綜合PNT體系及其關鍵技術[J].測繪學報,2016,45(5):505-510. (Yang Yuanxi. Comprehensive PNT System and Its Key Technology [J]. Journal of Surveying and Mapping, 2016,45(5): 505-510.)
[5] Barbour N,Schmidt G.Inertial Sensor Technology Trends[J]. IEEE Sensors Journal,2001,1(4): 332-339.
[6] 王淑華.國外CPT CSAC技術發展現狀 [J].微納電子技術,2016,53(3) :137-145. (Wang Shuhua. Foreign Technology Development of CPT CSAC [J]. Micronanoelectronic Technology, 2015(2): 48-52.)
[7] 汪中.Review of Chip-Scale Atomic Clocks Based on Coherent Population Trapping[J].中國物理,2014, 23(3):47-58.(Wang Zhong. Review of Chip-Scale Atomic Clocks Based on Coherent Population Trapping[J]. Chinese-Physics, 2014, 23(3): 47-58.)
[8] 趙令令,陳優.CPT原子鐘的概念及發展[J].中國科技術語,2014(s1).(Zhao Lingling, Chen You. Concept and Development of CPT Atomic Clock [J].Chinese Science and Technology Terms Journal ,2014 (11).)
[9] Wang Yue. GPS Software Receiver Based on MAX2769[J].Journal of Hebei University of Engineering,2012(3).
[10] Wang Hua, Chang Jing, Qin Changlu, Tian Xiang. An Implementation Scheme of GNSS Signal Simulator Based on DSP and FPGA [J] .Computer Science and Service System(CSSS), 2011:1080-1083.
[11] Yang Chun, Chen Qingwei, Zhang Ruilei, Zhang Lei. Design and Implementation of Integrated Navigation System Based on DSP [J]. Control Conference, 2014, 74(5-1):528-533.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中外會展(2014年4期)2014-11-27 07:46:46