一種基于地標(biāo)的星敏感器低頻誤差在軌校正方法
2018-07-06 08:49:58龐博李果黎康湯亮
航天器工程 2018年3期
龐博 李果 黎康 湯亮
(1 北京控制工程研究所,北京 100190)(2 北京空間飛行器總體設(shè)計(jì)部,北京 100094)
我國對地觀測衛(wèi)星正在向著高軌高分辨率發(fā)展[1],這就需要姿態(tài)確定系統(tǒng)提供高精度的姿態(tài)信息。目前常用的姿態(tài)確定系統(tǒng)由星敏感器和陀螺組成,星敏感器受空間熱環(huán)境影響產(chǎn)生的低頻誤差,在很大程度上影響了有效載荷的指向以及遙感圖像的處理質(zhì)量。通過對星敏感器低頻誤差進(jìn)行在軌校正,就能獲得準(zhǔn)確的衛(wèi)星姿態(tài)信息,實(shí)時響應(yīng)并完成用戶的成像任務(wù)。
星敏感器的低頻誤差主要是指星敏感器在太陽照射角度變化下,光軸指向發(fā)生運(yùn)動,從而產(chǎn)生的周期性誤差,這已經(jīng)在“星上自主項(xiàng)目”(PROBA)衛(wèi)星、先進(jìn)對地觀測衛(wèi)星(ALOS)衛(wèi)星和天繪一號等多個衛(wèi)星的傳輸數(shù)據(jù)中發(fā)現(xiàn)[2-4]。哨兵2號衛(wèi)星[5]將星敏感器低頻誤差建模為一階高斯-馬爾可夫過程,通過協(xié)方差調(diào)整對星敏感器的低頻誤差進(jìn)行濾除,但是模型未能完全體現(xiàn)低頻誤差的變化趨勢,校正效果有限。文獻(xiàn)[6-7]對星敏感器的低頻誤差進(jìn)行了功率譜分析和識別,并將星敏感器的低頻誤差建模為傅里葉級數(shù)形式,設(shè)計(jì)了擴(kuò)維卡爾曼濾波對低頻誤差進(jìn)行在軌校準(zhǔn),這種方法的校準(zhǔn)精度主要受陀螺測量精度的影響。空間技術(shù)實(shí)驗(yàn)和氣候觀測(STECE)衛(wèi)星上搭載著ASTRO-10星敏感器,文獻(xiàn)[8]根據(jù)星敏感器遙感數(shù)據(jù),將傅里葉變換和Vondrak濾波方法相結(jié)合,擬合出接近真實(shí)四元數(shù)的參考值,但并未對低頻誤差參數(shù)進(jìn)行估計(jì),只適用于地面事后高精度姿態(tài)處理。文獻(xiàn)[9]分析了低頻誤差與陀螺常值漂移之間的耦合影響,并基于此設(shè)計(jì)了一種兩步雙向平滑事后處理算法,但是處理過程計(jì)算量較大且僅適用于離線處理形式。由于對地觀測衛(wèi)星可以通過有效載荷獲取角秒級的地標(biāo)方向矢量數(shù)據(jù),文獻(xiàn)[10]采用批處理的方式,基于最小二乘算法估計(jì)星敏感器的低頻誤差參數(shù)。
在上述研究的基礎(chǔ)上,本文提出了一種新的星敏感器低頻誤差在軌校正方法,利用有效載荷提供的地標(biāo)信息,同時對衛(wèi)星姿態(tài)、陀螺常值漂移和星敏感器低頻誤差參數(shù)進(jìn)行估計(jì)。本文首先建立了由陀螺、星敏感器和地標(biāo)信息組成的姿態(tài)確定系統(tǒng)模型,其次根據(jù)系統(tǒng)模型的線性-非線性形式,推導(dǎo)了簡化的平方根容積卡爾曼濾波(SRCKF)算法,進(jìn)一步減低了算法的計(jì)算時間,以便適合在軌實(shí)現(xiàn)。最后本文通過仿真驗(yàn)證了算法的校正效果,為高精度的姿態(tài)確定系統(tǒng)設(shè)計(jì)提供參考。
1 姿態(tài)估計(jì)模型
1.1 姿態(tài)運(yùn)動學(xué)模型
采用陀螺和星敏感器進(jìn)行組合定姿,需要根據(jù)姿態(tài)運(yùn)動學(xué)建立系統(tǒng)方程,通過濾波算法進(jìn)行姿態(tài)確定,得到衛(wèi)星實(shí)時的姿態(tài)信息。陀螺是星體姿態(tài)基準(zhǔn),僅考慮常值漂移和測量噪聲時,其角速度測量模型為
(1)

當(dāng)衛(wèi)星的姿態(tài)誤差足夠小且忽略二階小量時,誤差四元數(shù)矢量部分的運(yùn)動學(xué)方程可寫為
(2)

1.2 星敏感器測量模型
星敏感器可以通過測量視場內(nèi)恒星相對于衛(wèi)星本體坐標(biāo)系的方位,確定星體相對于慣性坐標(biāo)系的姿態(tài)。星敏感器的測量模型具有多種形式,分別具有不同的測量誤差特性。本文根據(jù)星敏感器的光軸矢量形式,建立的測量模型為
li=AT(q)lb+vST
(3)

對地觀測衛(wèi)星繞地球旋轉(zhuǎn),受光照影響,其所在的空間熱環(huán)境會呈現(xiàn)周期性的變化,如圖1所示。而星敏感器的低頻誤差主要由空間熱環(huán)境的變化引起,表現(xiàn)為周期與軌道周期相近的周期性信號。通過星敏感器的安裝矩陣,星敏感器低頻誤差可從星敏感器測量坐標(biāo)系下轉(zhuǎn)換為衛(wèi)星本體坐標(biāo)系下,表現(xiàn)為歐拉角的周期性擾動信號。

圖1 空間熱環(huán)境變化示意圖
(4)
式中:ω0=2π/T是軌道角速率;T是軌道周期;t為時間;αxj、βxj、αyj、βyj、αzj和βzj(j=1,…,M)是低頻誤差的傅立葉系數(shù);M為低頻誤差傅立葉級數(shù)的階數(shù)。實(shí)際的低頻誤差校正過程中,可根據(jù)低頻誤差輪廓擬和的精度要求,對M進(jìn)行適當(dāng)?shù)恼{(diào)整。
式(4)可寫為
p=Φ·δp
(5)
式中:Φ為傅里葉函數(shù)矩陣;δp為傅里葉系數(shù)矩陣。
(6)
(7)
式中:c1=cos (1×ω0t);s1=sin (1×ω0t)。
1.3 地標(biāo)信息模型
地標(biāo)是具有顯著結(jié)構(gòu)特征的地物,如海岸線、島嶼和湖泊等。通過對地遙感衛(wèi)星上的有效載荷,可以得到包含地標(biāo)信息的標(biāo)準(zhǔn)圖像,在與地標(biāo)模板圖像進(jìn)行匹配后,由地標(biāo)的地理坐標(biāo)數(shù)據(jù)和衛(wèi)星質(zhì)心的軌道數(shù)據(jù)可以計(jì)算得到衛(wèi)星質(zhì)心到地標(biāo)的方向矢量在慣性坐標(biāo)系下的表示ri。利用有效載荷的成像幾何模型和安裝矩陣,可以觀測到衛(wèi)星質(zhì)心到地標(biāo)的方向矢量在星體坐標(biāo)系下的表示rb。具體如圖2所示。

圖2 地標(biāo)幾何模型
ri和rb均為單位向量,考慮測量誤差的存在,地標(biāo)信息可以建模為
(8)

2 低頻誤差在軌校正方法
2.1 在軌校正系統(tǒng)模型
傳統(tǒng)的姿態(tài)確定系統(tǒng)模型選取衛(wèi)星姿態(tài)和陀螺常值漂移作為狀態(tài)量,利用高精度的星敏感測量值,對陀螺漂移進(jìn)行校正。而這種姿態(tài)確定方法沒有考慮星敏感器的低頻誤差,本文利用狀態(tài)擴(kuò)維的方法,將低頻誤差的傅里葉系數(shù)矩陣擴(kuò)充為狀態(tài),同時對衛(wèi)星姿態(tài)、陀螺常值漂移和低頻誤差的傅里葉系數(shù)進(jìn)行估計(jì),以削弱星敏感器低頻誤差的影響。借助有效載荷,引入地標(biāo)信息作為測量值,加快低頻誤差系數(shù)的收斂,提高姿態(tài)確定的精度。

(9)
式中:F為線性系統(tǒng)狀態(tài)轉(zhuǎn)移矩陣,Γ為系統(tǒng)噪聲驅(qū)動陣,wp為零均值高斯白噪聲。
(10)
為了獲得準(zhǔn)確的姿態(tài)信息,根據(jù)雙矢量定姿原理,通常選用兩個或兩個以上不平行的光軸矢量作為測量信息。本文所采用的星敏感器測量模型和地標(biāo)信息模型具有一定的相似性,但只有星敏感器的測量信息受低頻誤差的影響。假設(shè)有兩個星敏感器和兩個地標(biāo),則觀測方程可以寫為
(11)
2.2 簡化SRCKF算法
由于在軌校正的模型是非線性模型,為了提高數(shù)值的穩(wěn)定性和精度,本文引入了SRCKF算法。SRCKF算法是一種采用貝葉斯理論描述后的非線性狀態(tài)估計(jì)方法,直接用協(xié)方差矩陣的平方根形式,其在濾波過程中進(jìn)行遞推更新,可以降低計(jì)算復(fù)雜度,保證協(xié)方差矩陣的非負(fù)定性,提高濾波的收斂速度和數(shù)值穩(wěn)定性[11]。
考慮如下離散非線性系統(tǒng)
(12)
式中:xk和zk分別為非線性動態(tài)系統(tǒng)在k時刻的n維狀態(tài)向量和m維測量向量;f(·)和h(·)為非線性的狀態(tài)函數(shù)和測量函數(shù);wk-1和vk為互不相關(guān)零均值高斯白噪聲,對應(yīng)的協(xié)方差分別為Qk-1和Rk。
SRCKF算法的核心在于計(jì)算高斯加權(quán)的多維非線性函數(shù)積分,而通過容積準(zhǔn)則,引入容積點(diǎn)和對應(yīng)權(quán)值,可將笛卡爾坐標(biāo)系下的積分計(jì)算轉(zhuǎn)換為某個多維幾何體的容積計(jì)算。
SRCKF算法主要可以分為時間更新和量測更新兩個部分,其中時間更新的計(jì)算過程如下。
1)容積點(diǎn)
(13)

2)容積點(diǎn)傳播
(14)
3)狀態(tài)預(yù)測均值
(15)
式中:wu為基本容積點(diǎn)向量ξu對應(yīng)的權(quán)值。
4)狀態(tài)預(yù)測誤差協(xié)方差矩陣的平方根矩陣
(16)

SRCKF算法適用于如式(12)所示的非線性系統(tǒng),本文所提的星敏感器低頻誤差在軌校正系統(tǒng)模型由式(9)和式(11)組成,其中狀態(tài)方程為線性形式,測量方程為非線性形式。為了使SRCKF算法更適應(yīng)在軌校正系統(tǒng)模型,可以利用線性的處理方法對時間更新過程進(jìn)行改進(jìn)。
根據(jù)式(9),將式(13)和式(14)帶入到式(15)中,有
(17)

(18)

(19)
用式(17)和式(19)代替SRCKF算法中的時間更新部分,即可得到基于線性-非線性系統(tǒng)模型的簡化SRCKF算法。

tSR=(4n3+2n2+2n)t1+(4n3+
4n2+2n)t2+9n2t3
(20)
tSSR=(n3+n2)t1+(n3+n2)t2+4n2t3
(21)
對比式(20)和式(21)可以發(fā)現(xiàn),簡化SRCKF算法明顯降低了時間更新過程的計(jì)算時間,有利于算法的實(shí)時運(yùn)行。對于線性的狀態(tài)方程,簡化SRCKF算法與SRCKF算法具有相同的數(shù)值理論估計(jì)精度,并且因?yàn)榻档土薗R分解中矩陣的維數(shù),使得簡化SRCKF算法具有更高的數(shù)值穩(wěn)定性。
2.3 在軌校正方法實(shí)施

采用地標(biāo)信息對星敏感低頻誤差進(jìn)行校正時,需要將地面典型地標(biāo)庫存儲為模板圖像,后續(xù)與衛(wèi)星載荷拍攝的圖像進(jìn)行識別和處理均通過星上計(jì)算機(jī)來完成。如果星上計(jì)算機(jī)的計(jì)算能力有限,也可以將遙測數(shù)據(jù)傳往地面站,在地面處理得到星敏感低頻誤差的信息,再上傳到衛(wèi)星上進(jìn)行校正。但由于非在軌實(shí)時校正,校正精度會有所下降。

圖3 在軌校正方法Fig.3 On-orbit calibration method
3 仿真分析
以三軸穩(wěn)定對地觀測衛(wèi)星作為算例進(jìn)行仿真,假定衛(wèi)星運(yùn)行在軌道周期為100 min的近圓軌道上。陀螺的常值漂移設(shè)為[1.0 1.2 -0.8]T(°)/h,陀螺的角度隨機(jī)游走系數(shù)和角速率隨機(jī)游走系數(shù)分別是1.5×10-4(°)/h1/2和6.5×10-2(°)/h3/2。星敏感器的測量噪聲由光軸方向的隨機(jī)噪聲和低頻誤差組成,其中隨機(jī)噪聲的標(biāo)準(zhǔn)差為1″,低頻誤差的輪廓基于在軌遙測數(shù)據(jù)建立,可采用典型的誤差參數(shù)進(jìn)行擬合,如表1所示[7]。有效載荷的采樣周期為15 min,每次觀測兩個地標(biāo)點(diǎn),獲得兩個地標(biāo)信息,兩個地標(biāo)點(diǎn)之間的角距為6°,每個地標(biāo)信息的測量誤差標(biāo)準(zhǔn)差為1″。令陀螺和星敏感器的采樣周期為1 s,地標(biāo)點(diǎn)的采樣周期為15 min,濾波周期為1 s,仿真時長為5個軌道周期。在軌校正方法中,狀態(tài)量里包含三個周期的所有低頻誤差系數(shù)。

表1 典型低頻誤差系數(shù)
首先,不對星敏感器的低頻誤差進(jìn)行校正,觀察星敏感器低頻誤差對姿態(tài)精度的影響。即采用傳統(tǒng)的卡爾曼濾波方法,直接利用陀螺的輸出數(shù)據(jù)和含有低頻誤差的星敏感器輸出數(shù)據(jù)進(jìn)行姿態(tài)確定,獲得的衛(wèi)星姿態(tài)誤差如圖4所示。從圖4中可以看出,三軸都存在明顯的周期信號,且周期與星敏感器低頻誤差的周期相似,說明傳統(tǒng)的姿態(tài)確定方法無法消除星敏感器低頻誤差的影響。
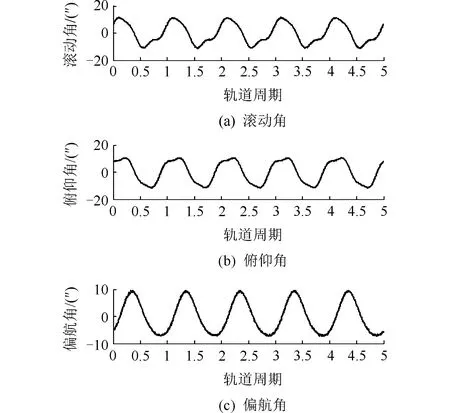
圖4 無星敏感器低頻誤差補(bǔ)償?shù)男l(wèi)星姿態(tài)誤差Fig.4 Satellite attitude errors without star sensor LFE compensation
其次,驗(yàn)證在軌校正方法的有效性。本文提出的簡化SRCKF方法,結(jié)合有效載荷提供的地標(biāo)信息,對星敏感器的低頻誤差進(jìn)行在軌校正。為了驗(yàn)證校正方法中加入地標(biāo)信息的有效性,采用觀測量中無地標(biāo)信息的在軌校正方法進(jìn)行對比,獲得的三軸姿態(tài)誤差如圖5~7所示。
通過圖5~7可以看出,分別采用兩種方法得到的衛(wèi)星姿態(tài)誤差在穩(wěn)定后都已無明顯的周期項(xiàng),且姿態(tài)確定的精度具有顯著提升。其中采用無地標(biāo)信息校正方法得到的姿態(tài)誤差約在2個軌道周期后達(dá)到穩(wěn)定,采用有地標(biāo)信息校正方法下得到的姿態(tài)誤差約在1.3個軌道周期后達(dá)到穩(wěn)定。相比于未加地標(biāo)信息得到的姿態(tài)誤差,加入地標(biāo)信息后得到的姿態(tài)誤差在滾動軸和俯仰軸上波動較小、穩(wěn)定度較高,但其在偏航軸上姿態(tài)誤差反而增大。這是由于多個類似光軸形式的地標(biāo)信息之間無法具有足夠的角距,來對偏航方向的姿態(tài)誤差進(jìn)行有效的幾何約束,才導(dǎo)致偏航軸的姿態(tài)誤差較大。為了更準(zhǔn)確的描述星敏感器低頻誤差補(bǔ)償后姿態(tài)確定的精度,表2中給出了幾種仿真情況下,衛(wèi)星三軸姿態(tài)誤差的均方根。可以看出,采用有地標(biāo)信息的在軌校正方法會將姿態(tài)估計(jì)誤差降低40%以上。
最后,分析當(dāng)?shù)貥?biāo)信息的測量誤差標(biāo)準(zhǔn)差增大時,對在軌校正方法的影響。令地標(biāo)信息的測量誤差標(biāo)準(zhǔn)差由1″增加到2″,三軸姿態(tài)誤差均方根也隨之明顯增大,見表2,可以看出,采用地標(biāo)信息時,地標(biāo)信息的測量誤差標(biāo)準(zhǔn)差應(yīng)當(dāng)小于等于星敏感器隨機(jī)誤差的標(biāo)準(zhǔn)差。

圖5 滾動姿態(tài)誤差比較Fig.5 Comparison of roll attitude error

圖6 俯仰姿態(tài)誤差比較Fig.6 Comparison of pitch attitude error

圖7 偏航姿態(tài)誤差比較Fig.7 Comparison of yaw attitude error

類型姿態(tài)誤差均方根/(″)滾動角俯仰角偏航角無低頻誤差校正3.694.002.87無地標(biāo)在軌校正0.320.270.30有地標(biāo)在軌校正0.130.162.12有地標(biāo)在軌校正(地標(biāo)測量誤差標(biāo)準(zhǔn)差增大)0.370.271.75
通過幾次仿真對比可以發(fā)現(xiàn),本文所提基于地標(biāo)的低頻誤差在軌校正方法在滾動軸和俯仰軸上具有最高的姿態(tài)確定精度。雖然該方法的姿態(tài)確定精度在偏航軸上有所下降,但仍優(yōu)于未進(jìn)行低頻誤差校正方法的姿態(tài)確定精度。校正過程中,每一次地標(biāo)信息的引入,都會降低姿態(tài)誤差的大小,因此當(dāng)無法持續(xù)獲得地標(biāo)信息時,也可以采用本文所提方法對星敏感器低頻誤差進(jìn)行在軌校正。另外,該方法的姿態(tài)確定精度受地標(biāo)的測量精度影響,當(dāng)?shù)貥?biāo)的測量誤差增大時,姿態(tài)確定的精度會相應(yīng)地降低。
4 結(jié)束語
為了削弱星敏感器低頻誤差對衛(wèi)星姿態(tài)確定精度的影響,將有效載荷觀測到的地標(biāo)信息引入到對低頻誤差的在軌校正方法中。基于在軌校正的系統(tǒng)模型,推導(dǎo)了簡化的SRCKF算法,以保證算法的實(shí)時運(yùn)行。仿真表明,與無地標(biāo)信息的在軌校正方法相比,引入地標(biāo)信息的在軌校正方法令姿態(tài)估計(jì)誤差的穩(wěn)定時間減少了35%,均方根降低40%以上,其改善效果與地標(biāo)信息的測量精度有關(guān)。
參考文獻(xiàn)(References)
[1] 李果, 孔祥皓, 劉鳳晶, 等. “高分四號”衛(wèi)星遙感技術(shù)創(chuàng)新[J]. 航天返回與遙感, 2016, 37(4): 7-15
Li Guo, Kong Xianghao, Liu Fengjing, et al. GF-4 satellite remote sensing technology innovation[J]. Spacecraft Recovery & Remote Sensing, 2016, 37(4): 7-15 (in Chinese)
[2] Jorgensena J L, Denvera T, Bettoa M, et al. The PROBA satellite star tracker performance[J]. Acta Astronautica, 2005, 56(1): 153-159
[3] Iwata T. Precision geolocation determination and pointing managment for the Advanced Land Observing Satellite (ALOS)[C]// Geoscience and Remote Sensing Symposium, 2003 IGARSS. New York: IEEE, 2003: 1845-1848
[4] 王任享, 王建榮. 無地面控制點(diǎn)衛(wèi)星攝影測量探討[J]. 測繪科學(xué), 2016, 40(2): 3-12
Wang Renxiang, Wang Jianrong. Discussion on satellite photogrammetry without ground control point[J]. Science of Surveying and Mapping, 2016, 40(2): 3-12 (in Chinese)
[5] Winkler S, Wiedermann G, Gockel W. High-accuracy on-board attitude estimation for the GMES Sentinel-2 satellite: concept, design, and first results[C]// AIAA Guidance, Navigation and Control Conference and Exhibit. Washington D.C.: 2008
[6] Xiong K, Zhang C Q, Liu L D. Identification of star sensor low-frequency error parameters[J]. IET Control Theory and Applications, 2012, 6(3): 384-393
[7] Xiong K, Zong H. Performance evaluation of star sensor low frequency error calibration[J]. Acta Astronautica, 2014, 98: 24-36
[8] Yuwang L, Junhong L, Yonghe D, et al. Precession-nutation correction for star tracker attitude measurement of STECE satellite[J]. Chinese Journal of Aeronautics, 2014, 27(1): 117-123
[9] 趙琳, 謝瑞達(dá), 劉源, 等. 星敏感器低頻誤差與陀螺漂移離線校正方法[J]. 航空學(xué)報(bào), 2017, 38(5): 197-210
Zhao Lin, Xie Ruida, Liu Yuan, et al. Offline calibration of star sensor’s low frequency error and gyroscope drift error[J]. Acta Aeronautica et Astronautica Sinica, 2017, 38(5): 197-210
[10] 熊凱, 湯亮, 劉一武. 基于地標(biāo)信息的星敏感器低頻誤差標(biāo)定方法[J]. 空間控制技術(shù)與應(yīng)用, 2012, 38(3): 11-15
Xiong Kai, Tang Liang, Liu Yiwu. Calibration of star sensor’s low frequency error based on landmark information[J]. Aerospace Control and Application, 2012, 38(3): 11-15 (in Chinese)
[11] 李志軍, 侯黎強(qiáng). 一種用于實(shí)時軌道確定的NPF-SRCKF濾波算法[J]. 宇航學(xué)報(bào), 2014, 35(7): 811-817
Li Zijun, Hou Liqiang. An improved NPF-SRCKF based algorithm for spacecraft orbit determination[J]. Journal of Astronautics, 2014, 35(7): 811-817 (in Chinese)
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
中華手工(2017年2期)2017-06-06 23:00:31
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
中外會展(2014年4期)2014-11-27 07:46:46
祝您健康(1987年3期)1987-12-30 09:52:32
