一種寬帶濾波信號處理機設計?
2018-07-10 09:18:18劉晉昌張立利
艦船電子工程 2018年6期
關鍵詞:信號
羅 坤 劉晉昌 張立利
(91388部隊 湛江 524022)
1 引言
在超短基線水聲定位系統對水聲信號處理過程中,除了海洋環境噪聲直接影響水聽器接收到的水聲信號,電子元器件的電路噪聲也會影響到接收到的信號。一般情況下可將電路噪聲視為白噪聲(因其是不規則噪聲),如果電路的工作頻帶越寬,則電路噪聲的累積量越大;當接收到的信號為微小信號時,電路噪聲會嚴重影響接收信號的檢測,需想辦法盡可能地減小電路噪聲的干擾。另外當模擬信號在進行模數轉換前,為了使模擬信號在轉換后能完整的體現在數字信號中,也要對模擬信號進行必要的濾波處理,否則轉換后的數字信號可能會失真。因此,需要根據要求設計濾波器濾除各種干擾噪聲。
2 信號處理接收機的構成
在超短基線水聲定位系統進行聲信號進行處理時,會引入較大海洋環境噪聲,差分信號形式能有效降低傳輸噪聲干擾,由于水聽器收到的水聲信號為差分信號,為了便于在后端減少工作流程,降低模擬接收機電路的復雜程度,要設有差分-單端轉換電路;同時水聽器檢測到的水聲信號轉化成弱電信號,為了便于對目標信號進行檢測,要采用前級放大電路對微弱信號進行放大;檢測的信號包括各種復雜噪聲,對此利用帶通濾波器對信號進行初步濾波,剔除一部分噪聲,同時在模擬接收機與數字處理器之間設置光耦隔離電路,預防噪聲互擾。
3 帶通濾波器需求分析與電路
帶寬設置是濾波電路的重要參數,由于超短基線水聲定位系統接收信號體制比較復雜、頻點跨度比較大、還要考慮多普勒頻移對于處在邊界處的頻率的影響,本系統接收的聲源信標信號為高頻調頻信號,考慮到目標被要求可裝載不同頻點的聲信標,以及邊界頻率的多普勒頻移,本接收機處理的信號頻率為85kHz~95kHz。
濾波器的階數是濾波電路的另一重要參數,設計濾波器的階數要考慮過渡帶衰減速度和電路可達到的復雜程度。系統中水聲信號處理模塊采用模擬濾波器主要是為了抑制海洋噪聲。由于聲信標發出的脈沖信號有陡峭的前后沿,這些陡峭的沿具有豐富的頻率成分,其中包括濾波器通帶內的頻率成分,如果這些頻率經過濾波器后,其時延是不同的,這必然引起波形前后沿的畸變,將會給信號的檢測與還原帶來不必要的麻煩。時延值?t與相移值?ω有如下關系:
為保證不同頻率通過濾波器的時延值是相同的,就必須保證的?ω值為一個常數,因此要考慮相位特性好、濾波特性符合的濾波器。即線性相位的濾波器才能達到設計要求[28~29]。圖 2、圖 3、圖 4分別為給出幾種帶通濾波器的濾波特性曲線六階貝塞爾型帶通濾波器、六階切比雪夫型帶通濾波器、六階巴特沃茲型帶通濾波器的相頻特性曲線。
由圖可以看出六階貝塞爾型帶通濾波器的相位特性最好,為線性相位,故選擇該型帶通濾波器。由于超短基線采用的是時延定位,階數越高平坦時延的頻帶就越寬,貝塞爾近似的時延特性遠比巴特沃斯近似和切比雪夫的近似的時延性要好的多,因此階躍響應也很好,沒有上沖。
4 帶通濾波器電路的設計
模擬濾波器通常可分為單純有電子器件組成的無源濾波器和帶運放芯片的有源濾波器兩種。無源和有源模擬濾波器各有優缺點:由電阻、電容、電感等簡單濾波器件組成的無源模擬濾波器的優點是電路設計簡單,缺點是帶負載能力差,設計電路需要大量的計算調試,因此對放大倍數要求較高的信號處理濾波器不適合用無源模擬濾波器;而有源模擬濾波器是由集成運放、外圍電容、電阻組成電路,并通過運放器作為電流源或電壓源,再配上RC網絡構成有源網絡,因此其優點是帶負載能力強,并且濾波器電路功耗低、噪聲小,對放大倍數要求較高的信號處理濾波器適合用有源模擬濾波器。
由于在使用時,對負載要求不高,而且濾波需求簡單,因而采用了無源濾波。在不增加電路復雜性的情況下可以得到性能較好的濾波器電路,并且調試方便。隨著計算機技術的發展,模擬濾波器的設計變得越來越簡便,各種模擬濾波器設計軟件很多,而且功能強大、設計方便,只要輸入相應參數,軟件會自動選擇濾波器的節數,并根據所選擇的濾波器種類給出相對應的原理圖、頻譜圖等。本設計中使用的帶通濾波器就是借助計算機軟件設計的,采用的六階貝塞爾濾波器,元器件誤差要求不高,易于調試。
5 湖上試驗
利用此設計的接收機電路我們在湖上進行了超短基線水聲定位系統對吊放式標校聲源進行定位試驗。湖試前,已在水池對超短基線定位分系統的時延進行了修正,并進行了計量。
湖試主要是驗證吊放式標校聲源大深度吊放時,超短基線定位分系統的工作性能并進行考核。超短基線定位分系統對吊放式標校聲源進行定位試驗的布放圖如下圖所示。吊放式標校聲源吊放深度為40m,在頂部裝有GPS,提供一個參考位置,由于是在湖中試驗,忽略水流影響,近似認為GPS位置即為吊放聲源位置。我們在水平面內距浮標式超短基線定位分系統距離分別為5m、12.5m和18.7m的三個位置進行了試驗。
短基線定位系統能給出吊放式標校聲源的經緯度,吊放式標校聲源頂部的GPS能給出吊放式標校聲源的參考經緯度。我們以參考的經緯度中的某點為原點,利用中分緯度法,給出了在一段觀察時間內,實測值和參考值在平面坐標中的位置關系如圖9所示。
圖中分成兩個區域,靠近原點的為參考經緯度測出的結果,另一個區域為實測值。由于吊放式標校聲源的吊放深度為40m,在水中實際位置的經緯度與參考經緯度是有偏差的,在圖中是可以看出的。但在三個測量點的測量值基本上是重合的,說明系統的測量結果是可靠的。在三個位置時X方向(正北方向)和Y方向(正東方向)的測量值的標準差如表1所示。
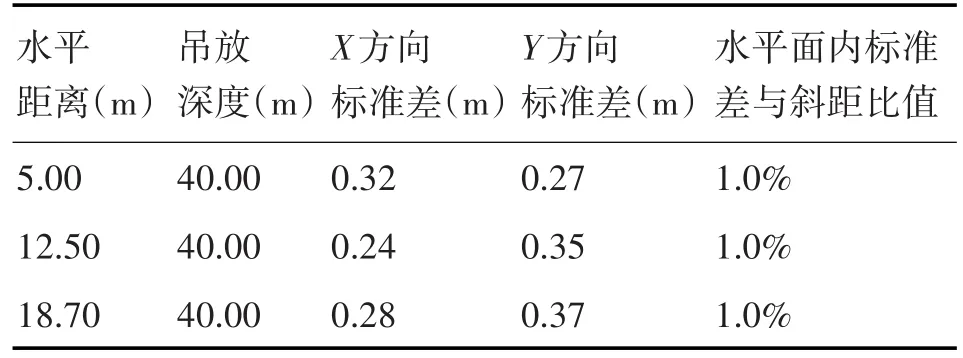
表1 標準差圖
針對實測的經緯度與參考經緯有偏差,我們分析是吊放式標校聲源在水下有漂移,所以我們又將吊放式標校聲源吊放至35m、30m、25m和20m進行測量,發現隨吊放深度減小,實測的經緯度與參考經緯度偏差值變小。
6 結語
通過湖試結果檢驗可知,信號處理機設計是比較成功的,為其他的水聲信號處理設備的研制也能提供一個有益的幫助。
[1]Daniel B Kilfoyle,Arthur B Baggeroer.The state of art in underwater acoustic telemetry[J].IEEE JOE,2000,25:4-27.
[2]丁士圻.對水下目標的大地坐標測量[J].海洋工程,1996,2:23-29.
[3]殷冬梅等.無線遙控浮標式水下目標跟蹤定位系統[J].系統下工程與電子技術,2004,26(9):1246-1249.
[4]丁士圻,徐新盛,王智元,惠俊英.船載式遠程高精度水聲定位系統[J]. 海洋工程,1996,14(4):16-21.
[5]水聲跟蹤定位標定系統設計方案報告[R].中國科學院東海研究站,2007.
[6]劉林泉.水聲綜合測控系統關鍵技術研究[D].哈爾濱:哈爾濱工程大學博士學位論文,2008:85-96.
[7]曹全林,關平.超短基線聲定位系統[J].聲學技術,1995(2):61-66.
[8]楊道軍,許偉杰,劉林泉,翁國忠.高精度定位標定系統水下基準方位誤差分析[J].聲學技術,2007,26(2):189-192.
[9]王權等.差分GPS水下立體定位系統[J].測繪科學,2006,31(5):18-21.
[10]王澤民,羅建國,陳琴仙,田力.水下高精度立體定位導航系統[J].聲學與電子工程,2005,2:1-3.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06