特種設(shè)備和危化品儲(chǔ)存容器無(wú)人機(jī)巡檢方法研究
2018-07-11 02:28:32楊景標(biāo)
中國(guó)特種設(shè)備安全 2018年6期
郭 晉 楊景標(biāo)
(廣東省特種設(shè)備檢測(cè)研究院 廣州 510655)
特種設(shè)備和危化品儲(chǔ)存容器廣泛應(yīng)用于我國(guó)重要的國(guó)民經(jīng)濟(jì)支柱產(chǎn)業(yè),對(duì)人身和財(cái)產(chǎn)安全有較大的潛在危險(xiǎn)性。大型塔器、乙烯球罐和原油儲(chǔ)罐、有毒介質(zhì)儲(chǔ)罐等特種設(shè)備和危化品儲(chǔ)存容器,如發(fā)生泄漏、火災(zāi)甚至爆炸事故,可能造成人員傷亡、重大的經(jīng)濟(jì)損失或嚴(yán)重的環(huán)境污染,其后果將嚴(yán)重影響社會(huì)安定。
為了使特種設(shè)備和危化品儲(chǔ)存容器處于正常使用狀態(tài),使用單位一般會(huì)進(jìn)行經(jīng)常性的巡檢和自行檢查;設(shè)備到了檢驗(yàn)周期時(shí),檢驗(yàn)機(jī)構(gòu)還會(huì)對(duì)設(shè)備的安全狀況進(jìn)行符合性驗(yàn)證性質(zhì)的定期檢驗(yàn)[1]。無(wú)論是巡檢、自行檢查,還是定期檢驗(yàn),都有宏觀檢查或宏觀檢驗(yàn)項(xiàng)目,且主要是通過(guò)人工目視檢查來(lái)完成。對(duì)于大型的特種設(shè)備和危化品儲(chǔ)存容器,一般通過(guò)扶梯或腳手架對(duì)人工可達(dá)部位進(jìn)行目視檢查。人工攀爬不僅費(fèi)時(shí)耗力,工作效率低,勞動(dòng)強(qiáng)度大,而且由于通過(guò)扶梯或腳手架難以覆蓋設(shè)備的所有部位,存在一些死角,因此很難全面發(fā)現(xiàn)潛在的安全隱患,致使一些本應(yīng)發(fā)現(xiàn)的事故隱患未能及時(shí)發(fā)現(xiàn)。
而在巡檢管理方面,限于技術(shù)原因,目前普遍采用“翻牌”的方式。如石化廠沿用的掛牌巡檢模式,即操作人員按照一定的路線,將第一站的牌子摘下掛在第二站上,第二站的掛在第三站上,依次類推直到巡檢結(jié)束。也有的采用較為先進(jìn)的電子巡檢模式,但都需要人工參與,不可避免地存在作業(yè)死角。
目前已有將無(wú)人飛行器應(yīng)用于公共安全、救災(zāi)、農(nóng)業(yè)、交通等領(lǐng)域的研究報(bào)道[2-6]。無(wú)人飛行器巡檢相比人工徒步巡檢具有效率高、操作簡(jiǎn)單、使用成本低、檢測(cè)范圍廣、無(wú)死角等優(yōu)點(diǎn),基于無(wú)人飛行器的巡檢技術(shù)較多地應(yīng)用于電力巡檢[7-11]。
多旋翼無(wú)人飛行器通過(guò)搭載全方位高清攝像頭及視頻信號(hào)無(wú)線回傳系統(tǒng),可通過(guò)自身攜帶的攝像機(jī)將拍攝的視頻實(shí)時(shí)傳輸?shù)降孛婵刂破脚_(tái)[12-14]。由于無(wú)人飛行器機(jī)身輕巧便于攜帶,操作輕便,可全方位、近距離拍攝受檢對(duì)象,巡檢作業(yè)無(wú)死角,無(wú)盲區(qū)。巡檢過(guò)程若發(fā)現(xiàn)問(wèn)題,無(wú)人飛行器可懸停拍攝,工作人員可以對(duì)疑似問(wèn)題的嚴(yán)重程度進(jìn)行判斷并擬定處理措施,免除了人工攀爬、檢查等作業(yè)困難,大大降低了人工巡檢作業(yè)的危險(xiǎn)系數(shù)和勞動(dòng)強(qiáng)度。
鑒于無(wú)人機(jī)巡檢技術(shù)的優(yōu)勢(shì),本研究的主要目的是探索將無(wú)人飛行器應(yīng)用于特種設(shè)備和危化品儲(chǔ)存容器巡檢的可行性和適用性。
1 無(wú)人機(jī)巡檢的飛行作業(yè)流程
為了使特種設(shè)備和危化品儲(chǔ)存容器無(wú)人機(jī)巡檢能達(dá)到檢驗(yàn)效果,確保作業(yè)順利進(jìn)行,同時(shí)保護(hù)無(wú)人機(jī)不受損,需要制訂一套可以指導(dǎo)具體巡檢作業(yè)的工作流程。本研究采用的是筆者已搭建的無(wú)人機(jī)巡檢系統(tǒng),該系統(tǒng)主要包括多旋翼無(wú)人飛行器、飛控系統(tǒng)(遙控器)、檢測(cè)系統(tǒng)和數(shù)據(jù)無(wú)線傳輸系統(tǒng)等四個(gè)部分[15]。
基于多旋翼無(wú)人飛行器的特種設(shè)備和危化品儲(chǔ)存容器巡檢飛行作業(yè)流程的主要步驟簡(jiǎn)述如下:
1)巡檢作業(yè)前,觀察受檢對(duì)象周圍較高建筑物,確認(rèn)無(wú)人飛行器返航高度。根據(jù)周圍房屋建筑、樹木、山包的高度適當(dāng)調(diào)整返航高度,防止飛行器飛到建筑物或者山包后面時(shí),飛行器與遙控器信號(hào)被阻擋丟失信號(hào)后,飛行器會(huì)按設(shè)置好的返航高度直線飛回起飛點(diǎn)。
2)根據(jù)預(yù)先設(shè)計(jì)好的方案和路線進(jìn)行飛行、拍攝和檢驗(yàn)等作業(yè)。通過(guò)無(wú)線傳輸設(shè)備,將巡檢拍攝結(jié)果傳送至遙控器,通過(guò)連接遙控器的顯示設(shè)備可以觀察相關(guān)拍攝結(jié)果。
3)根據(jù)無(wú)人機(jī)拍攝結(jié)果,對(duì)設(shè)備的整體情況進(jìn)行判斷。
2 巡檢作業(yè)方案
巡檢方案主要是制訂將無(wú)人機(jī)應(yīng)用于特種設(shè)備和危化品儲(chǔ)存容器宏觀檢查拍攝時(shí)的路線和內(nèi)容,實(shí)現(xiàn)對(duì)設(shè)備的宏觀檢查或檢驗(yàn)。無(wú)人機(jī)巡檢路線主要是針對(duì)高聳立式和沿水平方向布置的特種設(shè)備和危化品儲(chǔ)存容器來(lái)進(jìn)行設(shè)定。
對(duì)儲(chǔ)存無(wú)色無(wú)味危化品流體介質(zhì)的容器是否發(fā)生泄漏,可借助飛行器裝載紅外相機(jī)來(lái)拍攝檢查。此外,裝載紅外相機(jī)的飛行器還可以實(shí)現(xiàn)夜間巡檢。
對(duì)設(shè)備的無(wú)人機(jī)巡檢方式可細(xì)分快速巡檢和精細(xì)巡檢兩種。快速巡檢是對(duì)設(shè)備系統(tǒng)總體運(yùn)行狀況進(jìn)行快速檢查,主要檢查設(shè)備是否完好,從宏觀角度判斷設(shè)備的安全狀況。精細(xì)巡檢是利用無(wú)人飛行器懸停功能對(duì)設(shè)備存在缺陷或異常的部位進(jìn)行精細(xì)拍攝檢查。
根據(jù)無(wú)人飛行器巡檢的拍攝結(jié)果,對(duì)設(shè)備的安全狀況進(jìn)行初步的判斷,對(duì)是否需要采取進(jìn)一步措施提供直觀的實(shí)時(shí)依據(jù)。
2.1 立式特種設(shè)備巡檢
對(duì)設(shè)備巡檢的主要內(nèi)容包括:1)設(shè)備系統(tǒng)的總體運(yùn)行狀況;2)設(shè)備、管道及其安全附件的“跑、冒、滴、漏”情況;3)現(xiàn)場(chǎng)安全防護(hù)、消防等設(shè)施的狀況;4)關(guān)鍵設(shè)備和重點(diǎn)部位的安全狀況。
對(duì)于立式設(shè)備如高聳塔器,巡檢的飛行路線如圖1所示,通過(guò)控制飛行器從設(shè)備兩側(cè)緩慢爬升,上升到預(yù)定的高度后環(huán)繞塔器中軸線進(jìn)行環(huán)繞模式飛行,同時(shí)對(duì)塔器的外表面進(jìn)行拍攝,進(jìn)行快速巡檢作業(yè);如發(fā)現(xiàn)有問(wèn)題,控制飛行器處于懸停狀態(tài)對(duì)有問(wèn)題部位進(jìn)行仔細(xì)拍攝,開(kāi)展精細(xì)巡檢作業(yè)。
對(duì)于普通規(guī)模的設(shè)備,一般可通過(guò)人工進(jìn)行外部宏觀檢驗(yàn),如需使用飛行器進(jìn)行檢查時(shí),可以控制飛行器爬升到預(yù)定高度,然后圍繞設(shè)備中軸線在一個(gè)半徑范圍進(jìn)行拍攝檢查,如發(fā)現(xiàn)問(wèn)題,將無(wú)人飛行器懸停后進(jìn)行仔細(xì)拍攝。
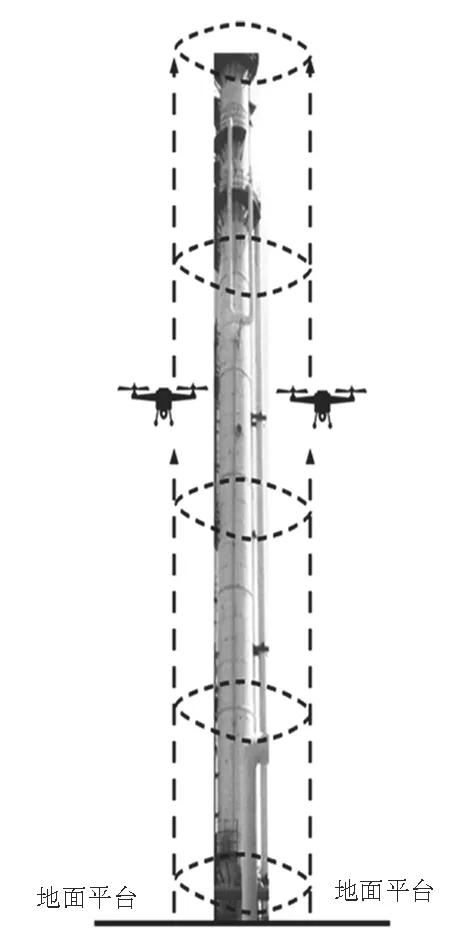
圖1 塔器的無(wú)人機(jī)巡檢路線示意圖
2.2 水平布置特種設(shè)備巡檢
沿水平敷設(shè)壓力管道是一種典型的水平設(shè)置的特種設(shè)備,其巡檢的內(nèi)容主要包括:1)管廊架上一切管線的總體運(yùn)行情況;2)管線有無(wú)“跑、冒、滴、漏”、銹蝕、損壞等現(xiàn)象;3)管廊架自身鋼結(jié)構(gòu)是否完好無(wú)銹蝕、平臺(tái)護(hù)欄是否完好無(wú)缺損及周邊有無(wú)危害到管廊安全運(yùn)行的情況;4)管廊周圍是否有對(duì)管線有安全隱患的施工活動(dòng)等。
對(duì)于沿水平方向的管道,可以通過(guò)來(lái)回地飛行路線進(jìn)行巡檢,巡檢路線如圖2所示。飛行器在飛行過(guò)程中進(jìn)行拍攝,進(jìn)入快速巡檢作業(yè)狀態(tài);如發(fā)現(xiàn)有問(wèn)題,控制飛行器處于懸停狀態(tài)對(duì)有問(wèn)題部位進(jìn)行仔細(xì)拍攝,開(kāi)展精細(xì)巡檢作業(yè)。
2.3 利用紅外相機(jī)的巡檢
上述兩種飛行路線的巡檢方案,主要是實(shí)現(xiàn)可見(jiàn)光的宏觀檢查或檢驗(yàn)。而對(duì)于無(wú)色無(wú)味流體介質(zhì)的泄漏、保溫層破損導(dǎo)致的溫度變化、夜間巡檢拍攝等可通過(guò)無(wú)人飛行器搭載紅外相機(jī)來(lái)實(shí)現(xiàn)。如對(duì)于危化品流體介質(zhì)的泄漏或保溫層破損導(dǎo)致的溫度變化后果,可以制定如圖3所示的巡檢路線。
通過(guò)控制飛行器在設(shè)備兩側(cè)緩慢爬升,上升到預(yù)定高度后環(huán)繞容器中軸線進(jìn)行環(huán)繞模式飛行,同時(shí)對(duì)容器的外表面泄漏情況和保溫層破損情況進(jìn)行紅外拍攝,開(kāi)展快速巡檢作業(yè);如發(fā)現(xiàn)設(shè)備有問(wèn)題,控制飛行器處于懸停狀態(tài)對(duì)有問(wèn)題部位進(jìn)行仔細(xì)拍攝,進(jìn)入精細(xì)巡檢作業(yè)模式。
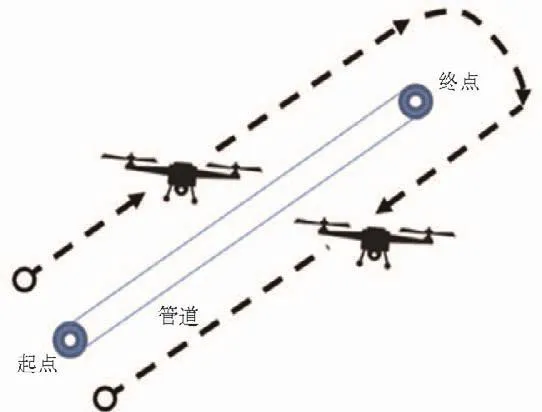
圖2 壓力管道的無(wú)人機(jī)巡檢路線示意圖
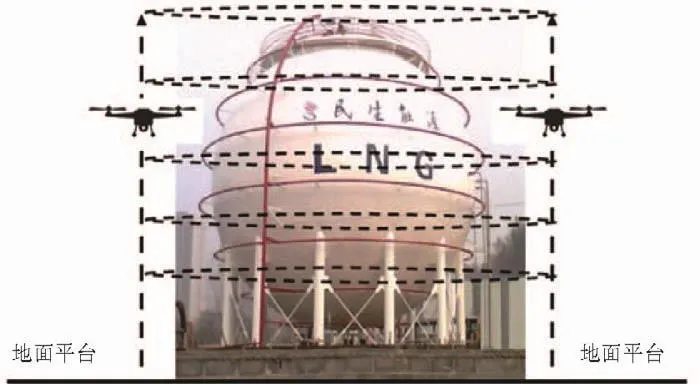
圖3 介質(zhì)泄漏的無(wú)人機(jī)巡檢路線示意圖
3 巡檢案例分析
本研究的無(wú)人機(jī)巡檢技術(shù)采用有效像素為1600萬(wàn)(分辨率為4608×3456)的云臺(tái)相機(jī)和FLIR長(zhǎng)波紅外熱成像云臺(tái)相機(jī)(分辨率為640×512),無(wú)人機(jī)系統(tǒng)為大疆的T600型飛行器。無(wú)人機(jī)巡檢可以實(shí)現(xiàn)的效果分析如下。
1)對(duì)于立式和水平布置特種設(shè)備的無(wú)人機(jī)巡檢,宏觀檢查的效果就如人工進(jìn)行的目視檢查,可以就設(shè)備的總體運(yùn)行情況、設(shè)備外表面銹蝕情況、外表面保溫情況、安全附件運(yùn)行情況、設(shè)備的“跑、冒、滴、漏”情況等進(jìn)行拍攝檢查。
2)裝載紅外熱成像相機(jī)的飛行器,與人工巡檢不一樣,可以更準(zhǔn)確地發(fā)現(xiàn)保溫層破損情況。對(duì)某石化企業(yè)的乙烯球罐保溫層破損情況進(jìn)行檢查,如圖4所示,發(fā)現(xiàn)球罐的外部保溫?fù)p壞部位為圖4中的左上角,其溫度較其他部位要高,說(shuō)明該部位的保溫材料有損壞。對(duì)于普通的目視檢驗(yàn)或可見(jiàn)光相機(jī)所拍攝的圖像,均未能有效發(fā)現(xiàn)該部位的保溫層破損。究其原因,是外保溫的保護(hù)金屬層未破損,只是保護(hù)金屬與設(shè)備外表面之間的保溫材料已脫落導(dǎo)致該部位的溫度出現(xiàn)異常。

圖4 紅外相機(jī)拍攝的溫度變化圖像
3)裝載紅外熱成像相機(jī)的飛行器,可以準(zhǔn)確地發(fā)現(xiàn)無(wú)色無(wú)味流體介質(zhì)的泄漏和煙霧擴(kuò)散。對(duì)某煉化企業(yè)儲(chǔ)罐區(qū)一原料油儲(chǔ)罐發(fā)生泄漏后引發(fā)火災(zāi)情況進(jìn)行拍攝,如圖5所示,發(fā)現(xiàn)了設(shè)備的介質(zhì)泄漏和煙氣擴(kuò)散情況,可以清楚地看出發(fā)生泄漏的儲(chǔ)罐和部位,及時(shí)發(fā)現(xiàn)安全隱患,進(jìn)而采取應(yīng)急處置措施。

圖5 紅外相機(jī)拍攝的介質(zhì)泄漏圖像
通過(guò)裝載紅外熱成像相機(jī),還可以實(shí)現(xiàn)無(wú)人飛行器的夜間飛行巡檢,主要是在測(cè)試基地進(jìn)行無(wú)人機(jī)夜間飛行和紅外熱成像拍攝測(cè)試。
總的來(lái)說(shuō),無(wú)人飛行器通過(guò)搭載紅外熱成像相機(jī),可以對(duì)溫度異常、流體介質(zhì)泄漏、火災(zāi)煙霧等現(xiàn)象進(jìn)行拍攝,為人工巡檢難以發(fā)現(xiàn)這些問(wèn)題提供強(qiáng)有力的輔助和補(bǔ)充。
無(wú)人機(jī)巡檢案例和測(cè)試結(jié)果表明,通過(guò)操控?zé)o人飛行器,可實(shí)現(xiàn)對(duì)特種設(shè)備和危化品儲(chǔ)存容器的巡檢,獲得設(shè)備安全狀況信息,為是否需要采取進(jìn)一步措施提供參考直觀的圖像依據(jù)。本方法的應(yīng)用結(jié)果體現(xiàn)了以下特點(diǎn):
1)提高了巡檢工作效率,同時(shí)由于免除搭設(shè)腳手架而降低了作業(yè)成本。
2)容易對(duì)人工難以到達(dá)的位置進(jìn)行檢查。只要飛行空間允許,無(wú)人飛行器可以360°全方位進(jìn)行飛行巡檢,做到不留死角。對(duì)于外圍輔助設(shè)施復(fù)雜的設(shè)備,由于受無(wú)人機(jī)飛行路線所限,無(wú)人機(jī)距離設(shè)備比較遠(yuǎn),需通過(guò)高分辨率的攝像機(jī)才能對(duì)設(shè)備外表面進(jìn)行有效的檢查拍攝。
3)通過(guò)搭載紅外熱成像設(shè)備,可以實(shí)現(xiàn)紅外熱成像功能和夜間巡檢,對(duì)設(shè)備外表面溫度異常、流體介質(zhì)泄漏、火災(zāi)煙霧等情況進(jìn)行拍攝,是人工夜間巡檢強(qiáng)有力的輔助手段。夜間飛行控制受到人的視線約束,無(wú)人機(jī)飛行距離有限。
通過(guò)對(duì)無(wú)人機(jī)飛行路線優(yōu)化設(shè)計(jì),可將最優(yōu)的快速巡檢路線儲(chǔ)存在飛控系統(tǒng)內(nèi),實(shí)現(xiàn)快速巡檢路線的調(diào)用;并根據(jù)需要隨時(shí)人工控制懸停,啟動(dòng)精細(xì)巡檢,完成后再切換到快速巡檢路線的控制,從而降低無(wú)人機(jī)的操作難度,避免造成無(wú)人機(jī)或者設(shè)備的損壞。本研究的無(wú)人機(jī)巡檢應(yīng)用主要是研發(fā)測(cè)試,今后可望作為人工傳統(tǒng)巡檢的強(qiáng)有力補(bǔ)充。
4 結(jié)論
1)通過(guò)制定合理的基于無(wú)人機(jī)的特種設(shè)備和危化品儲(chǔ)存容器巡檢方案和飛行路線,實(shí)現(xiàn)了無(wú)人機(jī)技術(shù)在特種設(shè)備和危化品儲(chǔ)存容器巡檢中的應(yīng)用,結(jié)果驗(yàn)證了無(wú)人機(jī)巡檢的效果和優(yōu)點(diǎn)。
2)搭載可見(jiàn)光相機(jī)和紅外熱成像相機(jī)的無(wú)人機(jī),不僅可實(shí)現(xiàn)全方位的目視檢查,還可有效發(fā)現(xiàn)溫度異常、流體介質(zhì)泄漏、火災(zāi)煙霧等問(wèn)題,為夜間巡檢和人工巡檢提供強(qiáng)有力的輔助和補(bǔ)充。
3)本方法的實(shí)施應(yīng)用是對(duì)特種設(shè)備和危化品儲(chǔ)存容器經(jīng)常性巡檢、自行檢查和定期檢驗(yàn)技術(shù)手段的補(bǔ)充,大大提高了工作效率和宏觀檢驗(yàn)范圍的覆蓋率。
[1]TSG 21—2016 固定式壓力容器安全技術(shù)監(jiān)察規(guī)程[S].
[2]朱黎明,黨彰,劉錦東. 淺談無(wú)人機(jī)在突發(fā)性公共事件中的應(yīng)用及啟示[J]. 中國(guó)應(yīng)急管理,2009,3(07):26-29.
[3]鄭攀. 小型無(wú)人機(jī)在公共安全領(lǐng)域的應(yīng)用前景展望[J]. 警察技術(shù), 2013,29(04):53-55.
[4]韋文功. 利用無(wú)人飛機(jī)開(kāi)展救災(zāi)的成功實(shí)踐[J]. 中國(guó)減災(zāi),2008,18(04):39.
[5]張偉,余曉偉,余泳昌. 電動(dòng)多旋翼飛行器的特點(diǎn)及其在農(nóng)業(yè)中的應(yīng)用[J]. 現(xiàn)代農(nóng)業(yè)科技, 2014(13):215-218.
[6]陳雷. 無(wú)人機(jī)在交通應(yīng)急指揮領(lǐng)域的應(yīng)用[J].中國(guó)交通信息化,2014,16(04):128-130.
[7]姜薈叢. 飛行器電力巡檢探討[J]. 山東電力技術(shù),2012,39(05):46-68.
[8]李臻立,涂明,杜勇. 無(wú)人飛行器智能巡檢應(yīng)用研究[J]. 湖北電力,2012,36(04):41-42.
[9]趙晨,杜勇. 四旋翼無(wú)人機(jī)在輸電線路巡視中的應(yīng)用[J]. 湖北電力,2012,36(06):35-36.
[10]鄭貴林,張麗. 自旋翼飛機(jī)電力巡線技術(shù)研究與應(yīng)用[J]. 中國(guó)電力,2014,47(07):26-31.
[11]李勇. 無(wú)人飛行器在特高壓交流輸電線路巡視中的應(yīng)用模式研究[D]. 北京:華北電力大學(xué),2014.
[12]呂明. 基于多傳感器協(xié)同檢測(cè)的輸電線路無(wú)人飛機(jī)巡檢關(guān)鍵技術(shù)[D]. 上海:上海交通大學(xué),2012.
[13]熊典,向文祥,王斌,等. 高壓輸電線路多旋翼無(wú)人機(jī)巡線技術(shù)及應(yīng)用[C]. 2013年度學(xué)術(shù)年會(huì)第五屆“智能電網(wǎng)”暨“電機(jī)能效提升”發(fā)展論壇論文集,2013: 5 0-54.
[14]楊成順, 楊忠,葛樂(lè),等. 基于多旋翼無(wú)人機(jī)的輸電線路智能巡檢系統(tǒng)[J]. 濟(jì)南大學(xué)學(xué)報(bào)(自然科學(xué)版 ),2013,27(04):358-362.
[15]鄭炯,楊景標(biāo),郭晉,等. 基于無(wú)人機(jī)的特種設(shè)備事故應(yīng)急處置方法研究[J]. 中國(guó)特種設(shè)備安全,2017,33(08):9-12.
猜你喜歡
江蘇安全生產(chǎn)(2022年8期)2022-11-01 09:14:48
中國(guó)特種設(shè)備安全(2022年6期)2022-09-20 02:52:28
江蘇安全生產(chǎn)(2022年4期)2022-05-23 13:03:42
江蘇安全生產(chǎn)(2021年8期)2021-11-05 08:14:52
水上消防(2020年4期)2021-01-04 01:51:18
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
電子制作(2018年11期)2018-08-04 03:26:08
故事大王(2016年7期)2016-09-22 17:30:08
工業(yè)設(shè)計(jì)(2016年12期)2016-04-16 02:52:00
消費(fèi)者報(bào)道(2014年7期)2014-07-31 11:23:57
