圓鋼端面貼標機器人機構構型綜合**
2018-07-20 08:24:42張付祥李文忠黃風山
制造技術與機床 2018年6期
張付祥 劉 再 李文忠 黃風山
(河北科技大學機械工程學院,河北石家莊050018)
目前國內外對圓鋼端面貼標均采用人工貼標方式,效率低下且生產成本高。為解決這一問題,構造圓鋼端面貼標機構應具有足夠的速度及一定的工作空間能力。串聯機構工作空間大、便于控制,但不宜高速運動。并聯機構結構穩定、精度高、速度高,故為學術界及產業界廣泛關注[1],但其工作空間小且控制解耦性差。混聯機構兼具二者的優點,避其缺點,在許多領域實用性遠勝于串聯及并聯機構[2]。構型設計是貼標機器人研究的重要環節。當前并聯機構結構綜合的方法主要有基于自由度計算公式的方法[3]、基于位移群理論的方法[4]、基于螺旋理論的方法[5]、基于線性變換的構型綜合方法[6]、基于高峰集的方法[7]、基于方位特征(POC)集的方法[8]。采用輸出自由度和方位特征集法對面向鋼鐵廠圓鋼端面貼標應用的混聯機器人進行拓撲結構綜合。
1 機構的方位特征描述
1.1 方位特征集的基本概念
對于一個機構來說其中一個構件i相對于另一個構件j的運動輸出情況可用方位特征集表示,記為:
1.2 串聯機構方位特征方程

式中:MS表示串聯機構的POC集;Mji表示第i個運動副的POC集;Msj表示第j個單開鏈的POC集。
1.3 并聯機構方位特征方程

式中:MPa表示并聯機構的POC集;Mbj表示第j條支路的POC集;ν表示獨立回路數。
1.4 自由度方程、約束度及耦合度
機構自由度:

式中:fi表示第i個運動副的自由度;ξLj表示第j個獨立回路的獨立位移方程數;Mbi表示第i條支路末端構件的POC集;表示由前j條支路組成的子并聯機構的末端 POC集;Mbj+1()表示第 j+1( )條支路的POC集。
對于單開鏈其約束度為:

式中:mj表示第j個SOC的運動副數;Ij表示第 j個SOC的主動副數;ξ1j表示第j個SOC構成的所有可能回路中,獨立位移方程數的最小值。
對于多回路機構其耦合度為:

式中:min·{ }表示將機構分解為 ν個 SOC時,取
2 貼標機構方案設計
2.1 圓鋼端面貼標運動功能分析
鋼鐵廠最常見的鋼筋直徑范圍為40~70 mm,鋼筋的長度范圍為4~12 m,整捆鋼筋的總直徑一般小于360 mm,鋼筋的總體重量在2.5 t左右,鋼筋水平放置,鋼筋端面的最大距離為50 mm。因此貼標機構要求一定的工作空間使其滿足整捆圓鋼端面的貼標需求,足夠的貼標速度以提高效率。
2.2 貼標機器人輸出自由度分析
根據圓鋼端面貼標工作,期望綜合出含有3維移動輸出以及2維轉動輸出的五自由度機構。考慮到串聯機構速度較低以及并聯機構難以實現足夠的工作空間與姿態調整能力,故期望構造混聯貼標機構。并聯部分決定機器人的精度及剛度,串聯部分決定機器人的調姿能力和末端執行器的懸掛形式[9],采取三平動并聯機構與基座相連以實現快速貼標工作需求,二轉動串聯機構與末端執行器相連以實現貼標姿態調整需求。即綜合出3T0R并聯機構與0T2R串聯機構,二者串接構成3T2R混聯機構。
3 基于POC集的貼標機構構型綜合
3.1 機構輸出自由度及POC集
混聯貼標機構的POC集為:

并聯部分及串聯部分的運動輸出特征方程分別為:

其中:t3表示獨立移動輸出數為3;r0表示獨立轉動輸出數為0;t0表示獨立移動輸出數為0;r2表示獨立轉動輸出數為2。
3.2 并聯機構構型綜合
(1)支路結構綜合及組合方案選取
支路運動輸出特征方程M1應滿足:
構造單開鏈(SOC)只考慮P副(移動副)和R副(轉動副)。其他運動副或閉合回路都可用P副和R副代替。根據自動貼標快速、輕載的工作情況,宜采用電動機驅動。考慮到直線驅動的兩種方式:其一滾珠絲杠傳動結構復雜,其二直線電動機無法自鎖且技術不成熟。這里選用旋轉驅動的方案,即主動副為R副。滿足上述要求的支路結構如表1所示。
將表1中任一支路中的從動P副用一個由4個R副組成的平面平行四邊形機構(用P4R表示)替換可提高整體機構的剛度及運動性能。

表1 3T0R并聯機構支路結構類型
由表中的支路可以綜合出3T0R并聯機構。支路中存在兩個從動移動副的機構,分支運動性能差實際工程應用并不實用,以P4R代替支路中含有一個從動P副的支路以提高其機構性能。故選取序號為4、7和8的支路(從動P副以P4R代替)進行并聯機構的構造。機構簡圖分別如圖1~3所示。
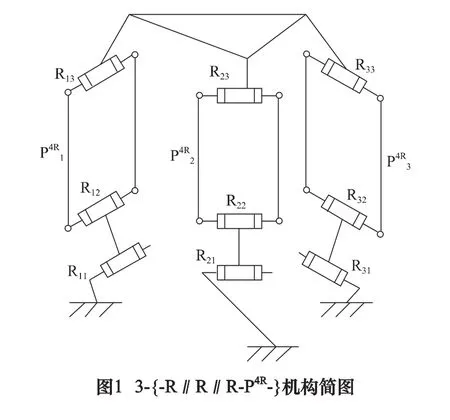
對稱并聯機構具有各向同性、高剛度、高承載等優點,因而更適用于工程應用,故期望綜合出對稱并聯機構,經驗證以序號為4、7、8中的支鏈均可構造對稱的三平移并聯機構。下面以3-{-R∥R∥R-P4R-}為例綜合一個3T0R并聯機構。
(2)支路在兩平臺裝配的幾何條件和自由度驗證
確定支路末端的POC集:
支路1:

則并聯機構的POC方程為:

3條支路在動平臺裝配的幾何條件僅為:3個P副的軸線空間交叉;第1、2條支路在靜平臺的兩個R副的軸線互不平行;第3條支路在靜平臺裝配的幾何條件為:不平行于前兩個轉動副的平面。
根據自由度公式,并考慮到兩條支路的R副R11,R21不平行,由第1、第2條支路組成的第1個獨立回路的 ξL1為:

式中:dim.{}表示求維數的函數。
第1、第2條支路組成子并聯機構自由度為:

根據并聯機構方位特征方程與F1-2()=3,第1、第2條支路組成子并聯機構動平臺的POC集為:

由自由度公式,并考慮到R11、R21與R31為空間任意交叉,則 ξL2為:

則并聯機構的自由度為:

因此機構自由度滿足設計要求。
(3)消極運動副及主動副的判定
根據消極運動副判定準則可證該機構的運動副均非消極運動副。根據主動副判定準則可證轉動副可同時為主動副。
(4)并聯機構特征分析
由基本運動鏈(BKC)判定方法知該機構只包含一個BKC,且其耦合度為

該機構只包含一個BKC,根據活動度類型判定準則,該機構具有完全活動度。根據拓撲結構的解耦原理,又已知該機構具有完全活動度,因此,該機構不具有運動輸入-輸出解耦性。
4 串聯部分構型及混聯機構的構造
4.1 串聯機構構型及末端執行器安裝方式

末端執行器的安裝方式有同軸式、懸掛式和側面式。同軸式安裝的主要優點是消除了壓緊力對機器人關節軸的被動力矩,有利于提高加工精度[10]。混聯機器人的實際貼標工作需要一定的壓緊力和一定的運動靈活性,同軸式安裝是混聯貼標機器人末端執行器的最佳安裝方式。
4.2 混聯機構構型及布局方式
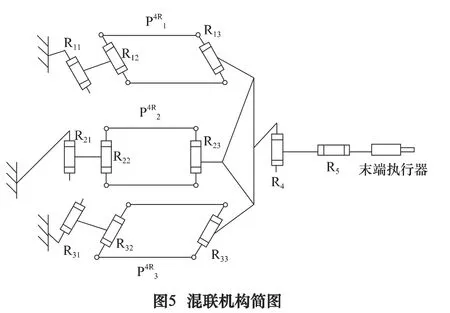
機器人的布置方式可選擇倒置式以及側置式。并聯機構作為貼標混聯機器人的主體決定了混聯機器人能否實現貼標工作。所構造并聯機構的工作空間直徑為d,高為h的圓柱形空間,而圓鋼捆的直徑一般小于360 mm,并聯機構通過合理配置可以容易地實現d>360 mm,但由于與主動副轉角以及桿長的限制,h難以大于360 mm,故機器人選擇側置式布置,如圖5所示。為避免機器人影響攝像機采集圓鋼位置信息,將攝像機固定在并聯機構的動平臺上。
5 結語
采用輸出自由度及方位特征集法給出面向圓鋼端面自動貼標應用的混聯機器人設計思路、方法及步驟,為面向特定應用的混聯機器人的設計提供了設計思路。
