
地鐵列車無人自動折返失敗的原因分析及改進措施
2018-07-24 12:33:08侯向陽
城市軌道交通研究 2018年7期
侯向陽
(西安市地下鐵道有限責任公司運營分公司,710016,西安//工程師)
列車的折返能力是制約整條地鐵線路(環形線路除外)運營能力的關鍵。西安地鐵3號線列車正線試運行期間,在終點站折返線DTRO(無人自動)折返的過程中,多次出現ATO(列車自動運行)給出牽引指令,但列車無法動車的情況。該情況將導致列車DTRO折返失敗,車輛無法從折返軌自動牽出,進而影響自動折返的效率。
1 列車自動折返概述及原理
1.1 列車自動折返概述
西安地鐵3號線采用西門子基于無線通信技術的移動閉塞列車控制系統。該系統車地雙向通信傳輸采用開放空間無線方式,且利用計軸系統及歐式應答器作為后備列車占用檢測設備。其采用的西門子CBTC(基于通信的列車自動控制)系統主要包含車載子系統(含車載ATO、車載ATP(列車自動保護))、ATS(列車自動監控)子系統、軌旁ATP系統以及DCS(數據通信子系統)無線傳輸系統等。
列車DTRO折返是采用一定的車輛設備、信號設備、固定設備實現的自動折返方式,它與列車行車組織方法有著密切的關系。而折返站的折返能力是地鐵線路通過能力的一個重要環節,其直接影響著全線的通過能力,甚至限制線路運輸能力的有效發揮。
1.2 列車自動折返原理
在有自動折返功能的車站,ATP/ATO車載計算機單元具備指示列車自動折返操作準備完畢、利用自動折返按鈕啟動折返操作以及執行折返運行的功能。當車門關閉、司機主控鑰匙處于關閉狀態時,ATP/ATO車載計算機單元得到一個移動授權,ATO即會駕駛列車進入折返軌。當列車停穩,ATP/ATO車載計算機單元便會執行交換駕駛室功能。當新的進路設定后,ATP/ATO車載計算機單元從ATP軌旁計算機單元得到移動授權,ATO即會駕駛列車駛入車站相反側的站臺。當列車再次停穩后,司機確認車門/屏蔽門開啟后激活司機室。
2 列車DTRO折返失敗故障調查
從列車監控系統下載的列車運行記錄數據(見表1)可判定,當列車進站后,其在折返軌兩端司機室的換端過程中產生緊急制動,此時緊急制動繼電器失電導致高速斷路器(HSCB)斷開;當緊急制動信號得電后HSCB再次自動閉合,且在HSCB閉合之前列車給出牽引指令,導致列車自動折返失敗。
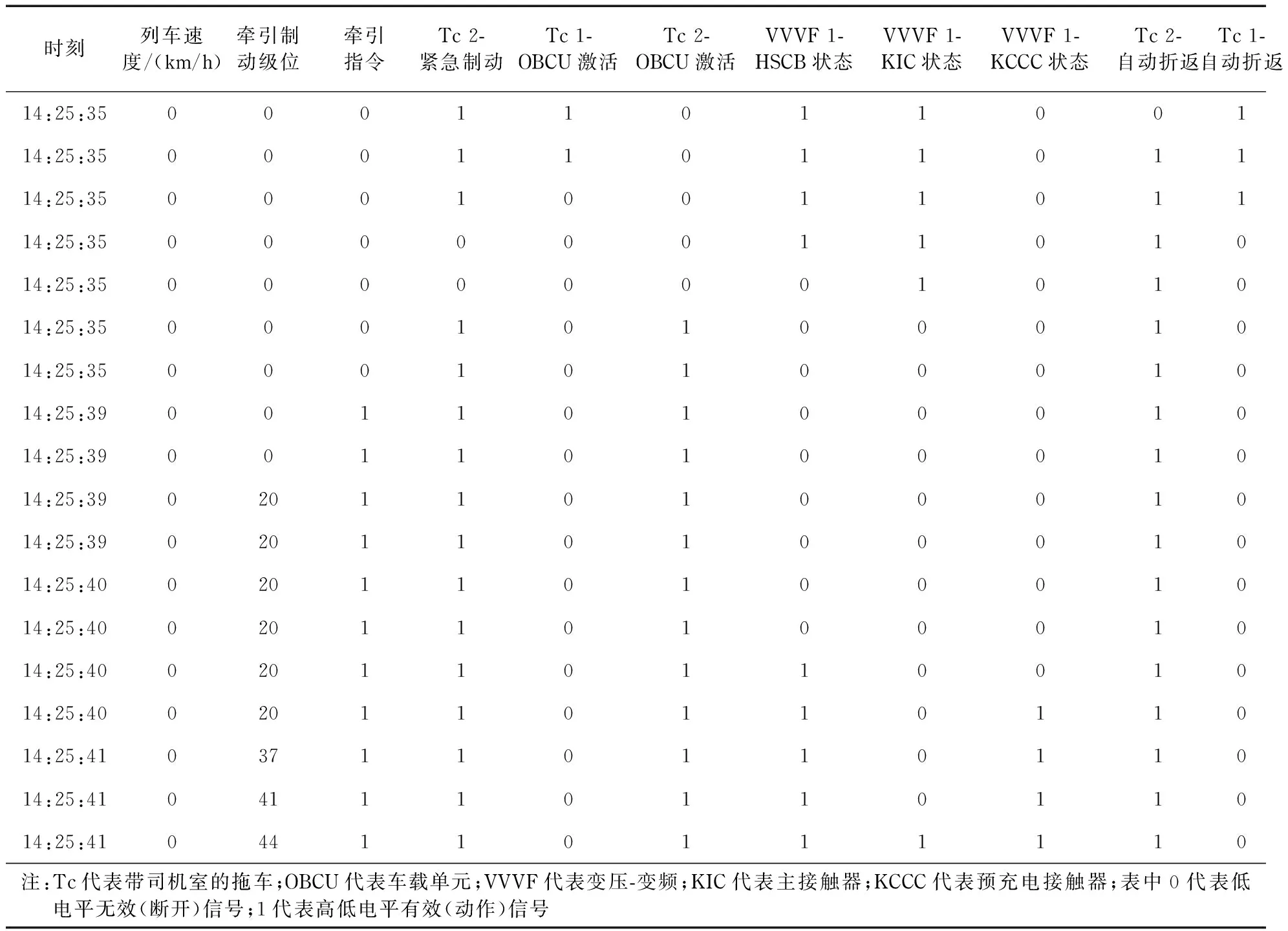
表1 列車運行記錄數據表
表1列車運行記錄數據顯示:列車在自動折返的過程中,于14:25:35由自動折返繼電器控制的司機室激活信號由Tc 1車激活變為Tc 2車激活,此時列車產生緊急制動(0.2 s后緊急制動自動緩解);同時列車高速斷路器(HSCB)斷開(即牽引系統線路接觸器(KIC)觸點斷開),列車于14:25:39給出ATO牽引指令,此時列車速度無變化,HSCB于14:25:40閉合,然后按照牽引逆變器充電時序,閉合預充電接觸器,并對牽引逆變器充電。
3 列車自動折返故障原因分析
3.1 概述
根據車輛設計安全要求,當列車主動施加(人工施加或緊急制動按鈕施加)緊急制動時,為避免脫軌、撞車等重大事故,列車應具備以下條件:
(1) 必須斷開牽引供電系統。
(2) 電氣列車如采用接觸網供電,必須降弓以斷開接觸網;如采用第三軌,供電系統必須斷開受電靴。
(3) 禁止使用電氣制動系統。
(4) 列車停車靜止前禁止緩解制動。
同時根據西安地鐵3號線車輛設計,在人工緊急制動按鈕施加緊急制動的工況下,列車不具備切斷供電導向安全的相關緊急制動聯鎖。因此,西安地鐵3號線緊急制動工況下,切斷供電導向安全的設計由牽引系統控制,且牽引系統必須與HSCB分開。
3.2 牽引系統電路原理分析
牽引系統采集緊急制動列車線,且為繼電器Q-NEB線圈供電,該系統用以在緊急制動工況下控制高速斷路器的斷開與閉合。牽引系統緊急制動采集電路如圖1所示。
HSCB保持電路如圖2所示。由圖2可知,繼電器Q-NEB的一對常開觸點用于控制高速斷路器保持電路的電源,且通過切斷LO-HOLD的供電斷開高速斷路器;繼電器Q-NEB的另一對常開觸點直接送給牽引控制單元,牽引控制單元用以檢測牽引系統緊急制動的狀態、逆變器控制以及故障診斷。

圖1 牽引系統緊急制動采集電路圖
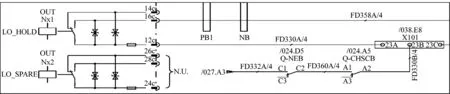
圖2 HSCB保持電路圖
3.3 列車折返失敗原因分析
3.3.1 牽引控制單元未檢測到緊急制動信號情況
牽引控制單元檢測緊急制動信號的周期為100 ms,高速斷路器保持失電動作時間為10 ms左右。如果在100 ms范圍內緊急制動失電恢復,則高度斷路器分開,此時牽引控制單元有一定幾率檢測不到緊急制動失電再恢復。但同時牽引控制單元收到了高速斷路器已斷開信號,因為檢測到外部指令(緊急制動失電再恢復現象)導致高速斷路器斷開情況,所以會給出hscb_selftrip故障記錄,如果此故障發出,則需要延時30 s才允許閉合高速斷路器,這樣就有可能使列車在30 s內無法動車。
出現100 ms以內的緊急制動丟失再恢復,就會導致高速斷路器在30 s內無法閉合,因此影響折返效率。列車電路必需確保列車在進入折返軌換端的過程中,不施加緊急制動(最優方案),或者施加緊急制動的時間大于120 ms。
3.3.2 牽引控制單元檢測到緊急制動信號情況
牽引逆變器檢測到的高速斷路器分開的現象是由列車緊急制動環線斷開導致。如果緊急制動失電再恢復時間為100 ms以上,則高速斷路器分開。此時牽引控制單元檢測到緊急制動失電,此情況是由緊急制動工況導致的高速斷路器斷開而導致的。在延時2 s后,如果檢測到緊急制動信號恢復,則高速斷路器閉合,此時啟動預充電流程,牽引逆變器進入工作準備狀態,整個準備過程需要6 s。
當列車緊急制動緩解后,牽引系統執行以下操作:
(1) 第一步:閉合高速斷路器且開始預充電,預充電完成后給出預充電完成信號(此時間持續6~8 s),且在預充電完成且信號收到后給出牽引系統OK信號。
(2) 第二步:預充電完成的同時,在檢測到牽引授權信號、預充電完成信號、方向指令信號等存在的情況下,開始檢測牽引指令;如果牽引指令由0變為1,則認為牽引指令為真,并施加牽引力。如果在高速斷路器閉合及預充電完成之前收到牽引指令,則牽引系統忽略此指令,此時不施加牽引力。僅在牽引系統完成準備的情況下,檢測到牽引指令由0變為1,則認為此指令為真,并施加牽引力。
由列車緊急制動環線斷開而導致的高速斷路器分開是目前自動折返失敗的主要原因。當列車進入折返軌后,在兩端司機室換端操作的過程中,列車出現緊急制動環線失電再得電的現象,即頭車AR(自動折返繼電器)斷開后,尾車AR未立即吸合。因此牽引系統須隨之斷開并重新閉合高速斷路器。若在高速斷路器重新閉合、牽引系統預充電的過程中,ATO子系統給出牽引指令,但鑒于安全導向,牽引系統忽略此牽引信號。在牽引系統完成準備工作后,未檢測到牽引指令的變化,無法施加牽引力,導致列車自動折返失敗。在牽引系統檢測到信號完備的情況下,再收到ATO子系統的牽引指令,才會允許發車。
4 列車自動折返改進措施
列車自動折返失敗的原因在于司機室在換端的過程中產生了緊急制動,進而使牽引系統進入緊急制動施加又緩解的操作流程。該情況導致在高度斷路器閉合之前ATO子系統給出牽引指令,且系統判斷此牽引指令無效而無法施加牽引力。針對此問題,可通過以下兩個方面進行整改。
4.1 車輛控制電路
車輛控制電路增加AR常開觸點,旁路由于列車換端給牽引系統緊急制動信號。這樣當AR得電時,即使司機室未激活,車輛側也不會施加緊急制動指令,此時牽引系統將不會分開高速斷路器;當司機或信號系統在AR模式下主動施加緊急制動后,列車會通過緊急制動繼電器切除牽引授權信號和牽引指令,在整個過程中,制動系統不受此旁路的影響,仍會施加緊急制動。
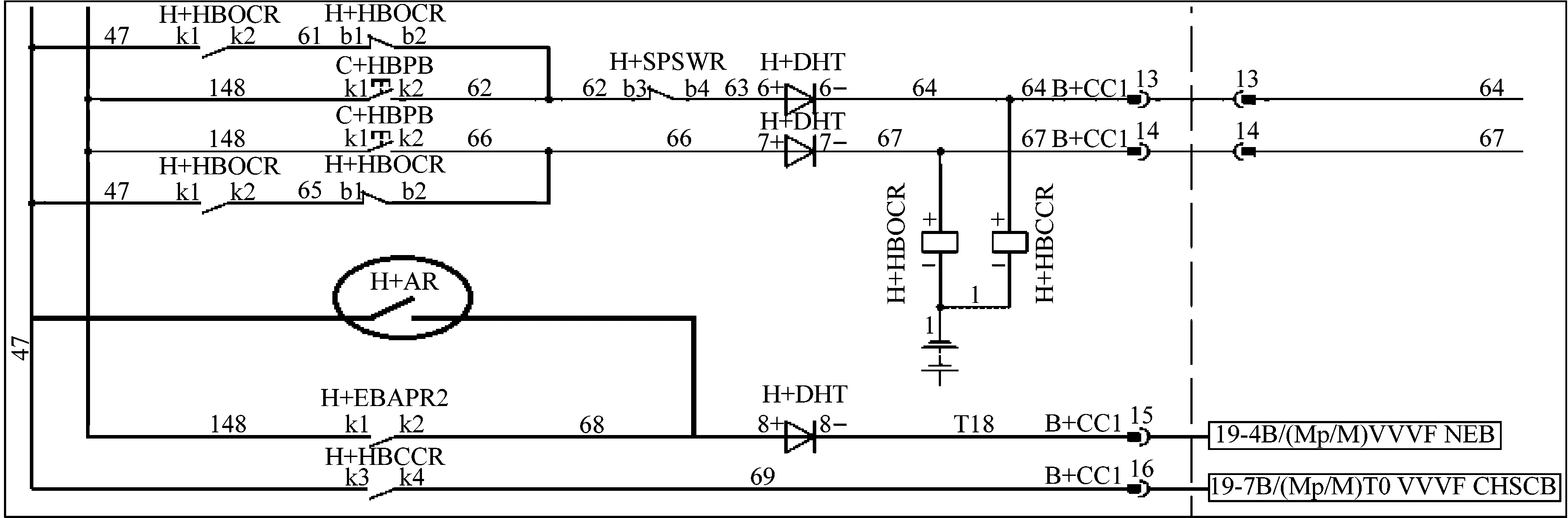
圖4 車輛設計電路整改方案
4.2 信號控制
在上述電路自動折返過程中,AR旁路牽引系統緊急制動信號的功能的完成,需要信號本端及遠端AR在吸合上有一定的重合時間(建議2 s)。當進行換端操作時,不存在所有AR同時失電的情況,這樣牽引系統收到緊急制動信號時不會產生失電的情況,進而確保列車自動折返功能正常使用。
5 結語
地鐵使用列車折返能力是制約整條地鐵線路運營能力的關鍵。西安地鐵3號線列車在自動折返司機室換端過程中施加了緊急制動,進而牽引系統進入緊急制動施加及緩解的操作流程,使得列車在出折返軌時因無法施加牽引力而導致自動折返失敗。鑒于列車自動折返緊急制動并非主動施加,因此可通過電路控制和信號控制等措施對列車緊急制動工況進行改進,經過現場TCMS運行記錄數據跟蹤,有效解決了自動折返失敗的問題,提高列車DTRO自動折返的效率,保證地鐵列車正點運營。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電子制作(2018年11期)2018-08-04 03:25:42
海峽科技與產業(2016年3期)2016-05-17 04:32:12
