
基于TCS230的雙路顏色傳感檢測裝置的研制及應用
2018-07-27 06:50:48鄒華東賈瑞清錢禮潤
現代電子技術 2018年14期
鄒華東 賈瑞清 錢禮潤


摘 要: 設計一種基于TCS230的雙路顏色傳感裝置。該傳感裝置采用兩個TCS230顏色傳感器聯合進行比對檢測,裝置整體設計成T型槽式機械結構。針對傳感器運行工作環境,從結構上對安裝尺寸和安裝方式進行了優化設計。選擇單顏色濾波器測量節省測量時間,選用測周法提高了測量精度,并且通過中位值濾波的數據處理方法提高了測量的準確度。該傳感器在AGV智能搬運機器人上得到了很好的應用,確保了機器人對道路禁行標志的準確檢測。
關鍵詞: 顏色傳感器; 檢測裝置; TCS230; 中位值濾波; 測周法; 搬運機器人
中圖分類號: TN247?34 文獻標識碼: A 文章編號: 1004?373X(2018)14?0024?05
Development of a double?path color sensing detection device
based on TCS230 and its application
ZOU Huadong1, JIA Ruiqing1, QIAN Lirun2
(1. School of Mechanical Electronic & Information Engineering, China University of Mining & Technology, Beijing 100083, China;
2. Department of Vehicle Engineering, Anhui Vocational College of Defense Technology, Liuan 237011, China)
Abstract: A double?path color sensing device based on TCS230 is designed. In the sensing device, two color sensors TCS230 are used to cooperatively perform contrastive detection. The whole device is designed as a T?groove shape mechanical structure. In consideration of the working environment of the sensor, the design of the mounting dimension and installation method is optimized in structure. The single color filter is selected for measurement to save the measurement time. The period measurement method is selected to improve the measurement precision. The median filtering data processing method is used to improve the measurement accuracy. The sensor is well applied to the AGV smart transfer robot, and the robot′s accurate detection of road prohibitory signs is ensured.
Keywords: color sensor; detection device; TCS230; median filtering; period measurement method; transfer robot
0 引 言
顏色識別在人們的生產生活中較為常見。如食品行業的水果成熟度分辨、印染行業里的布匹色差識別。對顏色分辨的需求也逐漸從幾種顏色的區分到細微色差的區分,并越來越趨向于分辨的高速化、智能化,區分顏色也由原來的人眼主導的識別也逐漸被相應的顏色傳感器取代[1?2]。
常見的顏色檢測系統有彩色面陣CCD構成的計算機圖像處理系統,能夠獲取待測物的RGB分量值,但是其檢測成本較高。利用不同顏色和材質的物體對于光線的反射率不同進行顏色分辨的傳感器有光敏電阻、色標傳感器、紅外傳感器等,但是其分辨顏色相對種類少,受外部環境光的影響較大,并且要根據不同顏色物體的相關特性在處理電路上進行相關的閾值區分,不適應多種顏色的區分。美國TAOS公司推出的顏色傳感器TCS230,根據光的三原色機理[3?5]能夠將測到的物體的顏色RGB信號分量轉成對應頻率信息,通過處理器進一步處理后進行顏色識別,其成本相對低廉,是目前顏色分辨常用的元件。
本文根據機器人道路紅色禁行標志顏色識別這一主題,采用TCS230顏色傳感器,設計了一種雙路顏色傳感裝置。該裝置提高了顏色分辨準確率和分辨效率,在機器人避障上獲得了良好應用,并為其他場合的無人駕駛機器人的顏色分辨應用提供了良好借鑒作用。
1 傳感器結構及基本工作原理
1.1 顏色識別基本原理
TCS230是TAOS公司推出的可編程彩色光到頻率的轉換器,它把可配置的硅光電二極管與電流頻率轉換器集成在一個單一的CMOS電路上,同時在單一芯片上集成了紅綠藍(RGB)三種濾光器,其輸出方波頻率信號,典型輸出頻率范圍[6?7]為2 Hz~500 kHz。
圖1為TCS230的引腳封裝圖。圖中[OE]為傳感器使能控制端,OUT為輸出端。如表1所示,工作時,通過可編程引腳S2,S3選擇所需要的濾波器;兩個可編程引腳S0,S1來選擇100%,20%或2%的輸出比例因子,或電源關斷模式。比例因子越小,對同樣顏色的檢測輸出信號周期越長,考慮到響應的及時性,S0,S1直接置為高電平,全頻率輸出。
1.2 傳感器結構及工作原理
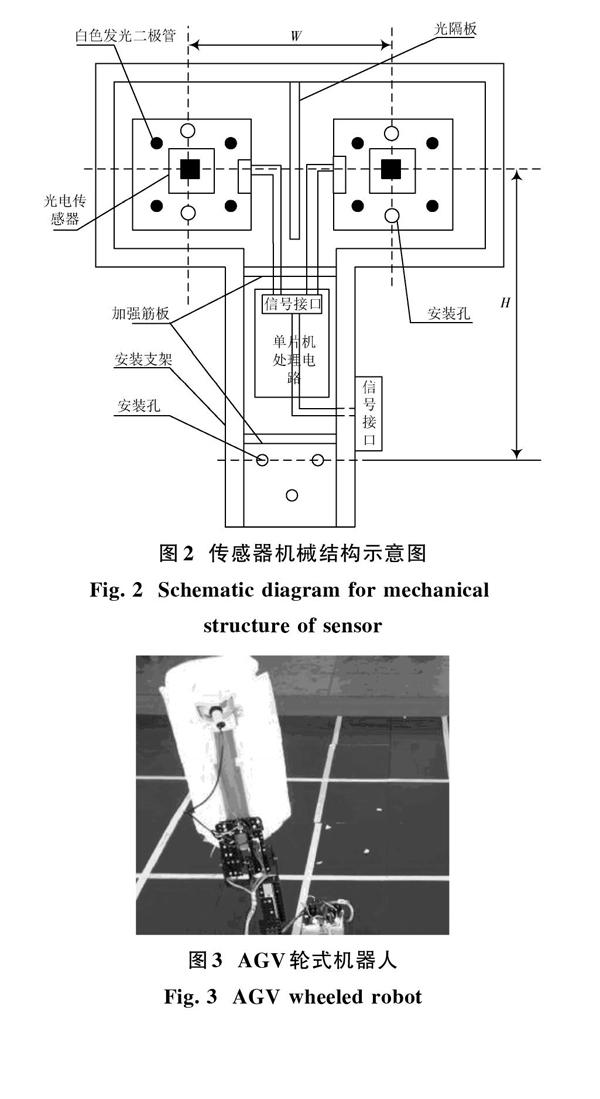
圖2為雙路顏色傳感裝置機械結構示意圖。TCS230和4個陣列式分布的LED發光二極管設計在同一塊電路板上,其中發光二極管用于提供合適的照明。中間隔光板用于分隔左右2個傳感器的光源,防止互相間的干擾。傳感器檢測獲得的頻率信號通過信號端口與單片機處理電路模塊的信號端子連接,通過單片機處理后把檢測結果由信號輸出端子傳于控制機器人的上位機。由于傳感裝置通過安裝孔螺紋連接的方式安裝在機器人本體上,通過前端的兩個探頭進行探測,其安裝基本為懸臂梁的模式,為減少傳感器裝置的上下抖動,在內部安放了兩個加強筋板,用于提高剛度。安裝支架為整體的T形槽,T型槽結構具有防塵、阻隔外部雜散光的作用。
圖3為AGV輪式機器人實物圖。其主要包括機器人抓取裝置、運動本體、巡線模塊、顏色檢測裝置等。機器人按照規劃路徑通過巡線傳感器檢測引導線,控制車身沿著白色引導線穩定前行,圖中的紅色圈為禁止通行標志,根據需要隨機放置,即使規劃路徑經過該交叉點,機器人也不得從禁行標志處通過,需要自動繞開該位置。整個場地分為綠色背景、白色引導線、紅色禁行標志三種顏色。
機器人本體的巡線傳感器為光敏電阻,通過閾值區分綠色和白色兩種顏色。禁行標志為紅色,一方面巡線傳感器無法區分,另一方面,巡線傳感器安放在機器人中前部位置,即使能夠區分反應時間也不夠。如果采用單路TCS230顏色傳感器,整個行進采集過程會遇到很多種情況:單一白色、單一綠色、單一紅色、白色?綠色、白色?紅色、綠色?紅色、白?綠?紅,在沒有比對的情況下出現誤判的概率較大。
為了減少誤判幾率,本傳感器采用雙路顏色傳感器進行檢測,其檢測的示意圖如圖4所示。
當機器人本體在姿勢正確的情況下,傳感器識別紅色標志物時,依次經過下面三種狀態:綠?綠、綠/紅?綠/紅、紅?紅。此時左右傳感器的狀態測量值基本一致。機器人在姿勢偏離引導線一定角度時,其可能情況如圖4所示,在機器人巡線穩定,偏離角度θ較小的情況下([±15°以內]),不論何種情況,最終總有一個傳感器能夠在禁行標志范圍內。而對于單傳感器的情況,可能出現傳感器一直處于臨界位置狀態,產生誤判。綜上可以得出,左右傳感器只要有一個檢測到紅色信息即能判斷前方存在障礙點。對于臨界位置,可以通過延時法利用機器人運動慣性沖過。
圖5為機器人安裝上顏色檢測裝置示意圖。白色導向線寬為30 mm,紅色禁行標志直徑D為100 mm,顏色傳感器的光敏面尺寸為4 mm×4 mm。傳感檢測裝置在檢測時,需要盡量減少臨界位置出現概率,以減少誤判率。所以雙傳感器之間的距離W至少應該滿足的條件為30 [(L1+H-15)×tan 15°-W2≤D2-42] (1) 將各參數代入式(1),得H[≤]147.4,為確保至少有一個顏色傳感器能夠全部進入紅色區域,H長度應當盡量短。在考慮到反應時間情況下,經過綜合測試,取H為95 mm。 2 測量速度和精度提升方法 2.1 測量方法提升精度 機器人在運動時,其對于前方道路的預判具有實時性,需要傳感器的響應速度與運動速度相匹配。選用速度較快的處理芯片是其中的一種方法,但是增加了成本,從測量方法和測量原理上入手來提升測量速度是有效且可靠的。 由于TCS230顏色傳感器輸出的是頻率信號,單片機對于頻率信號的常用測量方法有測頻法和測周法。對于頻率較高的信號,由于其周期較短,如果采用測周法,誤差在單片機的一個計數周期范圍內,測量相對誤差較大,而采用測頻法,在一定的時間間隔內計算方波個數,據此計算出其周期,誤差相對較小。對于頻率較低的信號,采用測周法引起的相對誤差較小,測頻法由于除法引起的舍去誤差造成較大的測量相對誤差。對于方波信號,測周法由于只需測量半個周期的時長,與測頻法相比,相對費時較少。表2為顏色傳感器在距離檢測物表面20 mm,選用不同的顏色濾波片,設置100%輸出比例因子,由示波器采集的輸出信號的周期數據(無色濾波片由于各顏色物體的周期數據較為接近,區分度不夠大,本表未列)。 由表2可以看出,周期最長的為156 μs ,其周期與單片機的計數器計數周期相比較大,適合采用測周法。障礙標志物的直徑為110 mm,機器人的平均運行速度為0.5 m/s,正常走過110 mm距離的時間為0.22 s; 而采用測周法的耗費時間大約為1.5個周期,即0.3 ms以內,檢測時間遠快于運行響應需要。

電路原理如圖7所示,S0,S1都連接高電平,為全頻率輸出模式,芯片使能信號[OE]連接低電平,為工作狀態,S2,S3與單片機AT89C51的P0.0,P0.1引腳相連,由單片程序控制引腳電平選擇對應濾波器,兩傳感器輸出引腳分別接到外部中斷引腳[INT0],[INT1],通過單片機程序進行測量。
測周法的主要原理是采用單片機定時器計算方波半周期的時長。如圖8所示,在開始采集時,傳感器輸出的方波信號[INT0]不管當前處于低電平還是高電平狀態,都一直等待,直到第一個周期結束。該步確保單片機有足夠時間進行相關設置。第二個周期開始,信號處于低電平時,在寄存器TMOD中設置T0的門控位GATE=1,TR0=1,此時[INT0]的信號為低電平,定時器啟動條件不滿足,同時設置C/[T]=0,M1M0=01,采用定時方式1,即16位計數方式,單片機晶振(12 MHz)的12分頻作為定時器計數基準,計數周期為1 μs;當信號[INT0]的上升沿到來時,自動啟動定時器計數,當信號下降沿到來時,關閉定時器T0,將定時器內的數值取出就是所測信號半周期,其內部工作邏輯關系如圖9所示。
傳感器TCS320通過調節顏色濾波片設置,使特定的原色光通過,阻止其他原色光通過,為了獲取目標物的R,G,B分量值,需要測量三次頻率信息,相當于單一分量測量的3倍時間。由表2可知,選擇紅色濾波片綠色背景和紅色禁行標志的差異較大,而且禁行標志和標準的白色引導線周期數據相比,也有較好的區分度。所以如果只是區分不同物體的顏色,通過測量單一紅色分量就能夠很好區分。如果具有更多顏色區分的場合,在保證良好的分辨特性的前提下,也可以通過單綠、單紅、單藍、紅綠、紅藍、綠藍等多種方式中選擇某種方式,從而提高檢測效率。本方案選擇單一紅色濾波器進行檢測。
2.2 數據處理提升精度
機器人在運動過程中不可避免會出現振動,傳感器安裝于機器人的前部,產生振動的主要原因有電機工作時的振動、工作場地不平整所引起的振動、前方空氣阻力產生的振動等。振動會導致傳感器上下擺動,而顏色傳感器在不同的高度測量同一物體的顏色輸出頻率的差異性較大,影響到測量結果的準確度。另外一方面,由于機器人的運動,如果對同一位置多次采樣,在采樣時間內,機器人位置發生了變化,會導致不同時刻采集的數據屬于不同位置的顏色信息。因此必須選擇合適的數字濾波算法來剔除錯誤的采樣數據。
常用的數字濾波算法有: 中位值平均濾波法、平均值濾波、中值濾波、限幅濾波和慣性濾波等[1,8?10]。傳感裝置的安裝是懸臂梁的形式,其振動往往是以安裝水平作為振動中心上下擺動,經過試驗傳感器距離目標的距離與輸出結果呈現較好的線性關系,所以選擇平均值濾波或者中位值平均濾波法都具有可行性。在樣本數N取值為5的情況下,采樣測量的時間大致為 2.3 ms, 按照機器人運行速度為0.5 m/s的速度,采樣時間里的位移為1.15 mm,在可以接受的范圍內。中位值濾波的運算速度比平均值濾波快,其在濾除脈沖噪聲的同時可以很好地保護信號的細節信息。所以方案選擇中位值濾波。圖10為選擇綠色濾波器,在靜止情況下、運動情況下(不做濾波)、運動情況下(中位值濾波),對同樣的綠色場地10次采樣值。由圖10可以看出,在靜態采樣的情況下,采集數值的變動范圍在5 μs以內,而動態無濾波的采樣器數值變動范圍很大,到20 μs,采用中位值濾波的方法,其變動范圍在7 μs左右,雖然大于靜態采集的范圍,但是動態范圍遠小于無濾波動態采集。所以中位值濾波動態采集的方法有效地提升了采集精度,確保了采集數據的可信度。
3 結 語
本文設計了一種顏色檢測裝置,在分析了機器人位置誤差、外部光干擾、場地條件、臨界位置對顏色檢測效果的影響基礎上,從機械結構上對傳感裝置進行了安裝尺寸、安裝部件的優化設計,并且采用雙顏色傳感器聯合檢測的模式提升檢測準確度。通過選擇單顏色濾波器進行測量節省了測量時間;選擇舍去第一周期的測周法來提升測量精度;采用中位值濾波數據處理方法提高測量精確度。該傳感器在AGV智能搬運機器人上得到了很好的應用,確保了機器人能夠實時、準確地識別道路禁行標志。該傳感器主要是在分析傳感器特性、現實條件限制的基礎上對TCS230顏色傳感器的一種創新應用,其設計思路和方法對于其他類型傳感器的設計應用具有較好的借鑒作用,該傳感器經過改進后也可以用于其他自動導航機器人需要多種顏色辨識的場合。
參考文獻
[1] 趙萬劍,徐耀良,王博,等.顏色傳感器TCS230在糾偏控制系統中的應用研究[J].傳感技術學報,2011,24(12):1804?1808.
ZHAO Wanjian, XU Yaoliang, WANG Bo, et al. The application and research of TCS230 color sensor in correction control system [J]. Chinese journal of sensors and actuators, 2011, 24(12): 1804?1808.
[2] 陳熵,陶棟材,劉新庭,等.基于TCS230傳感器的新鮮辣椒顏色識別研究[J].中國農學通報,2015,31(17):267?271.
CHEN Shang, TAO Dongcai, LIU Xinting, et al. Research on color identification of fresh pepper based on TCS230 colorimeter sensors [J]. Chinese agricultural science bulletin, 2015, 31(17): 267?271.
[3] 謝發忠,鄒華東,吳年祥.基于TCS230的顏色檢測裝置及其在智能裝配機器人避障中的應用[J].工程設計學報,2013,20(1):60?64.
XIE Fazhong, ZOU Huadong, WU Nianxiang. A color detection device based on the TCS230 and its application on the intelligent assembly robot for obstacle avoidance [J]. Chinese journal of engineering design, 2013, 20(1): 60?64.
[4] 郁道銀,談恒英.工程光學[M].4版.北京:機械工業出版社,2016.
YU Daoyin, TAN Hengying. Engineering optics [M]. 4th ed. Beijing: China Machine Press, 2016.
[5] 陸徐平,徐耀良,李渝曾,等.基于TCS230的新型雙路顏色傳感器的研制[J].電子技術應用,2007,33(8):89?91.
LU Xuping, XU Yaoliang, LI Yuzeng, et al. Development of a new double?path color sensor based on TCS230 [J]. Application of electronic technique, 2007, 33(8): 89?91.
[6] 蔣寅國,鄧燕妮.基于TCS3200的多點顏色檢測裝置的設計[J].儀表技術,2011(3):54?55.
JIANG Yinguo, DENG Yanni. Design of multipoint color measuring device based on TCS3200 [J]. Instrumentation technology, 2011(3): 54?55.
[7] 彭波,李旭宇.TCS230顏色傳感器結合BP神經網絡在顏色識別系統上的研究[J].食品與機械,2010,26(3):108?112.
PENG Bo, LI Xuyu. Research on color identification by TCS230 color sensor combined BP neural network [J]. Food & machinery, 2010, 26(3): 108?112.
[8] 徐科軍.信號分析與處理[M].北京:清華大學出版社,2006.
XU Kejun. Signal analysis and processing [M]. Beijing: Tsinghua University Press, 2006.
[9] 李芹,王偉,彭道剛.過程控制測量信號數字濾波方法優化[J].實驗室研究與探索,2016,35(4):26?29.
LI Qing, WANG Wei, PENG Daogang. Optimization of the filtering methods for process control measuring signals [J].Research and exploration in laboratory, 2016, 35(4): 26?29.
[10] 周繼裕,陳思露,符少文.基于均值滑動濾波算法和STM32電子秤的設計[J].現代電子技術,2017,40(10):10?12.
ZHOU Jiyu, CHEN Silu, FU Shaowen. Design of electronic scale based on mean sliding filtering algorithm and STM32 [J]. Modern electronics technique, 2017, 40(10): 10?12.
