一種淺海環(huán)境垂直剖面監(jiān)測系統(tǒng)研制?
2018-08-01 12:37:04范業(yè)明
艦船電子工程 2018年7期
關鍵詞:系統(tǒng)
范業(yè)明
(大連測控技術研究所 大連 116013)
1 引言
在海洋環(huán)境監(jiān)測、海洋生產、水產養(yǎng)殖領域里,經常需要對特定領域的海水參數(shù)進行長期、定點、實時的垂直剖面監(jiān)測。然而,現(xiàn)有海洋環(huán)境監(jiān)測平臺主要是在特定海域內通過鏈式傳感器浮標的方法獲取水下環(huán)境垂直剖面的監(jiān)測數(shù)據(jù),該種方式雖然能夠準確監(jiān)測到同一垂直剖面不同深度的水質數(shù)據(jù),但是需要將多個傳感器工作在不同深度的監(jiān)測點才能得到更加全面的水下環(huán)境數(shù)據(jù),這樣勢必造成整個水下環(huán)境監(jiān)測系統(tǒng)成本增高。而本次設計通過采用升降式控制方法,只需要單傳感器就可以實現(xiàn)同一垂直剖面的不同深度的精確測量,很大程度上降低了水下垂直剖面不同深度的長期連續(xù)監(jiān)測系統(tǒng)成本,為我國進一步開發(fā)海洋資源、保護海洋生態(tài)環(huán)境以及減災防災工作提供實時可靠的、性價比較高的水下環(huán)境監(jiān)測系統(tǒng)[1~3]。
2 系統(tǒng)總體設計
如圖1所示,升降式環(huán)境垂直剖面監(jiān)測系統(tǒng)控制防水電機通過齒輪轉動相互咬合帶動連接傳感器線纜的纏繞,實現(xiàn)整個傳感器的升降過程。在整個系統(tǒng)工作過程中,相比傳統(tǒng)的鏈式環(huán)境監(jiān)測方式,單傳感器的升降式環(huán)境監(jiān)測系統(tǒng)替代了傳統(tǒng)的懸掛多傳感器的鏈式監(jiān)測方式,在很大程度上減輕了系統(tǒng)的重量、簡化了系統(tǒng)的設計結構、降低了系統(tǒng)功耗。另外,由于對整個系統(tǒng)的結構復雜度進行了簡化,所以整個系統(tǒng)在布放、回收方面,相比傳統(tǒng)的由多傳感器組組成的龐大環(huán)境監(jiān)測系統(tǒng),它的布放方式具有很大的可操作性,降低了海上系統(tǒng)施工的難度[4]。
基于升降式設計思想,本次系統(tǒng)設計主要重心是電機傳動控制,保證整個系統(tǒng)能夠升降式工作,完成不同深度水下環(huán)境數(shù)據(jù)采集和傳遞,實現(xiàn)長期、穩(wěn)定的升降式水下環(huán)境垂直剖面監(jiān)測系統(tǒng)[5]。
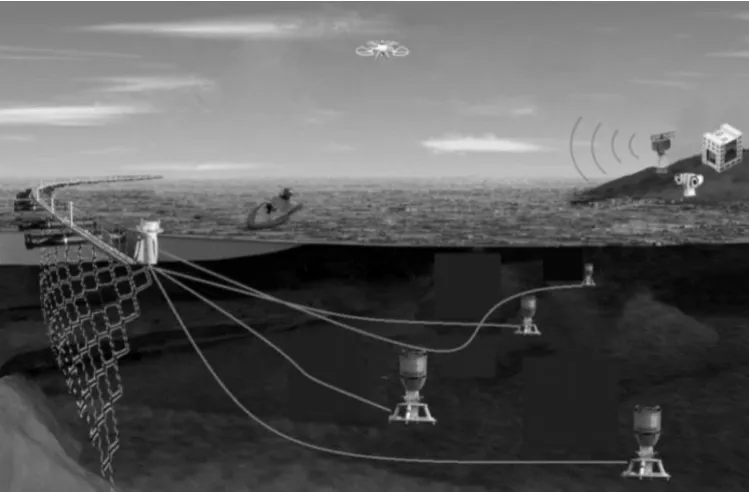
圖1 系統(tǒng)示意圖
3 系統(tǒng)硬件設計
如圖2所示,整個環(huán)境監(jiān)測系統(tǒng)主要由環(huán)境監(jiān)測傳感器組、繞線盤、水下電子艙、錨定裝置、水下信息采集裝置、水面浮球組成。環(huán)境監(jiān)測傳感器組放置在水下浮球內部。用于完成溫深鹽物理量的采集,錨定裝置和繞線盤用于固定系統(tǒng)和實現(xiàn)水下浮球的升降功功能。而水下電子艙主要作用是控制繞線盤的轉動,實現(xiàn)實際需要的轉動圈數(shù)、速度控制操作[6]。
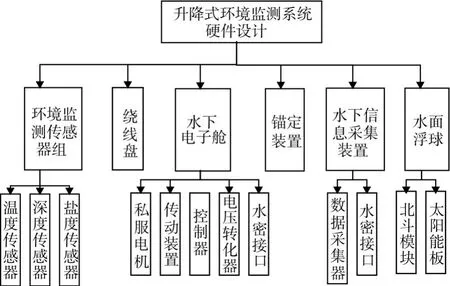
圖2 系統(tǒng)硬件結構圖
如圖3所示,淺海垂直剖面環(huán)境監(jiān)測系統(tǒng)主要由水下浮球、水下電子艙、纏線盤、錨定裝置組成,其中水下電子艙內主要有私服電機、電機控制器、電壓轉化器、水密接口等模塊。水下電子艙放置在纏線盤的內部,水下浮球、纏線盤之間通過鎧裝電纜連接(鎧裝電纜能夠保證線纜的抗拉性),鎧裝電纜一端通過水密連接器連接水下浮球內部的波浪儀、溫度傳感器、鹽度傳感器,為其提供工作電壓和監(jiān)測數(shù)據(jù)傳輸功能。鎧裝電纜另外一端則纏繞在纏線盤上,鎧裝電纜接頭通過水下連接器和來自水下信息采集裝置的水下電纜連接,并通過該電纜將采集的水下環(huán)境數(shù)據(jù)發(fā)送到水下信息采集裝置,并通過北斗模塊返回到岸站系統(tǒng)進行數(shù)據(jù)處理,而來自水下信息采集裝置的水下電纜除了為水下傳感器提供電能,它的分支接頭也通過水下連接器接入到水下電子艙內部,為水下電子艙內的電機、電機控制器提供工作電壓[7]。
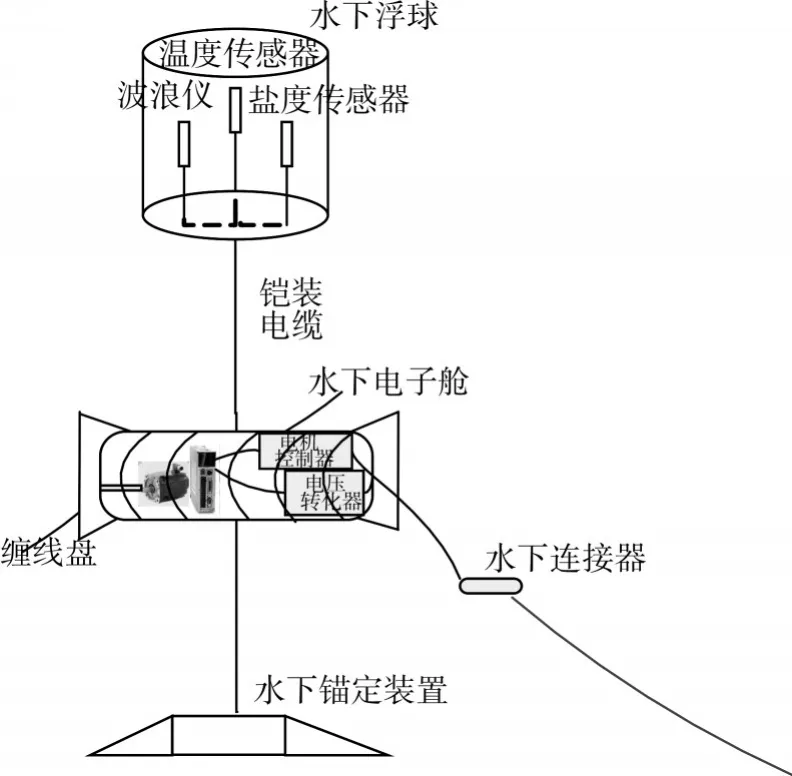
圖3 升降式系統(tǒng)結構設計圖
在系統(tǒng)工作過程中,由于水下電子艙內部的伺服電機定子與傳動裝置是固定連接的,而纏線盤依托齒輪咬合能夠被私服電機定子的旋轉帶動起來,所以整個升降式控制系統(tǒng)便可以通過電機旋轉實現(xiàn)纏線盤正反方向的定速纏繞。由于纏線盤通過鋼纜與水下錨定裝置是固定連接的,且處于正浮力狀態(tài),纏線盤始終是處于穩(wěn)定平衡狀態(tài)。當纏線盤勻速纏繞線纜時,纏線盤與水下浮球的線纜長度發(fā)生變化,從而實現(xiàn)單組傳感器在同一垂直剖面的不同深度海水環(huán)境監(jiān)測[8]。
由于本次設計的垂直剖面環(huán)境監(jiān)測系統(tǒng)采用單一傳感器組通過升降式控制方式進行水下環(huán)境測量,替代了傳統(tǒng)的多組傳感器固定鏈式測量方式,這樣整個系統(tǒng)只需要給每套水下測量裝置的單套傳感器進行供電即可,避免了傳統(tǒng)的多傳感器組供電的方式。所以本次升降式水下環(huán)境監(jiān)測系統(tǒng)所需功耗要比鏈式水下監(jiān)測系統(tǒng)小很多。而實際應用中,私服電機控制纏線盤轉動并不是頻繁操作,所以不會造成系統(tǒng)整體功耗負擔。基于此,本次系統(tǒng)采用太陽能板加蓄電池供電方式,并通過北斗衛(wèi)星,將水下環(huán)境信息數(shù)據(jù)傳輸?shù)桨墩緮?shù)據(jù)中心進行后期處理。該種系統(tǒng)供電和通信方式替代了傳統(tǒng)的水下電纜供電和傳輸數(shù)據(jù)方式,不僅節(jié)省了供電和傳輸電纜的成本、而且還避免水下電纜長期磨所需要的維修成本,保證數(shù)據(jù)傳輸?shù)陌踩院头€(wěn)定性。
4 系統(tǒng)軟件設計
由于整個淺海環(huán)境垂直剖面監(jiān)測系統(tǒng)是由多個水下測試單元組成,當多個監(jiān)測系統(tǒng)同時向水下信息采集裝置發(fā)送數(shù)據(jù)時,勢必造成數(shù)據(jù)采集裝置不能有序的接收到每套環(huán)境監(jiān)測系統(tǒng)所傳送的水下環(huán)境數(shù)據(jù),造成數(shù)據(jù)丟失或者錯誤。所以本次系統(tǒng)在進行數(shù)據(jù)傳輸時,采用了CAN總線的控制方式,通過數(shù)據(jù)采集單元的協(xié)議規(guī)定進行數(shù)據(jù)仲裁,保證每個時間段,只能有一套系統(tǒng)使用通道進行環(huán)境數(shù)據(jù)發(fā)送。基于CAN技術的使用,在保證數(shù)據(jù)傳輸?shù)姆€(wěn)定性和可靠性前提下,整個系統(tǒng)軟件設計的重心就是通過控制電機的轉動,完成纏線盤的精確纏線操作[9~11],具體系統(tǒng)軟件流程圖如圖4所示。
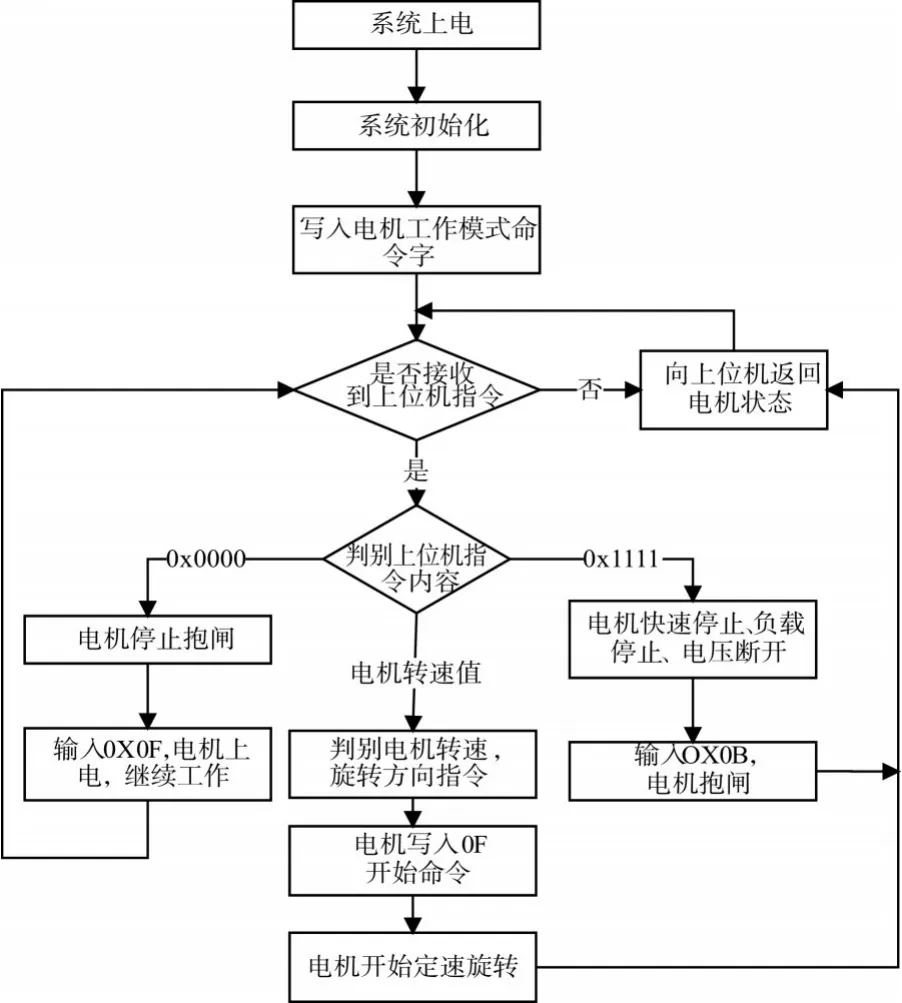
圖4 系統(tǒng)軟件設計圖
升降式控制系統(tǒng)上電初始化后,電機控制器對私服電機寫入工作模式,等待上位機的指令。接收到上位機指令后判別指令的具體內容,如果是速度指令,在判別電機轉速、方向后,寫入相應命令字,在寫入0F,則電機開始工作。如果接收到指令是0x1111或者是0x0000,則分別代表了電機抱閘和電機停止抱閘后繼續(xù)工作的意思。如果電機控制為接收到上位機的指令,則向上位機發(fā)送電機的工作狀態(tài)信息。
5 驗證
如圖5所示,在實驗室通過系統(tǒng)控制應用軟件向水下環(huán)境監(jiān)測系統(tǒng)發(fā)送控制命令。具體設置參數(shù)包括電機轉動方向、電機轉速。當電機控制指令發(fā)出后,發(fā)現(xiàn)纏線盤實際運行方向、纏線盤轉速與升降式控制軟件預輸入?yún)?shù)一致,說明升降式控制系統(tǒng)工作性能的穩(wěn)定性和精確性。

圖5 系統(tǒng)演示軟件界面
基于上述實驗室驗證實驗,將系統(tǒng)布放于水深約30m的海洋中,在錨定裝置沉入水底后,初始值我們設定錨定裝置離纏線盤大約5m,而水下浮球離纏線盤大約20m,即25m的水深。系統(tǒng)通電開始工作并開始水下環(huán)境數(shù)據(jù)采集。數(shù)據(jù)采集約100s后,開始轉動纏線盤處于纏線狀態(tài),此時通過定深實時監(jiān)測當置水下5m處,停止纏線盤轉動并進入水下環(huán)境數(shù)據(jù)采集狀態(tài),工作約100s后,系統(tǒng)開始控制纏線盤放線置水下20m處,并將系統(tǒng)長期進行水下環(huán)境監(jiān)測狀態(tài)中。如圖6所示,整個測試結果說明,系統(tǒng)升降跟蹤能力達到了較高的精度,平均升降跟蹤誤差小于1 m。
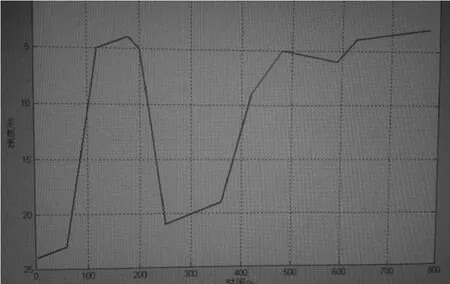
圖6 系統(tǒng)深度變化數(shù)據(jù)分析圖
6 結語
本文通過升降式控制設計完成了一種淺海環(huán)境升降式監(jiān)測系統(tǒng)。系統(tǒng)設計預留一組傳感器接線,可為后期系統(tǒng)功能升級、改進提供接口[12]。另外,在系統(tǒng)進行海水環(huán)境監(jiān)測過程中,由于系統(tǒng)受到海水浮力作用,為保證系統(tǒng)穩(wěn)定工作,配備了錨定裝置懸掛在升降式系統(tǒng)下方,保證升降式系統(tǒng)工作在正浮力狀態(tài)下,減輕了升降式系統(tǒng)中私服電機的負載重量,節(jié)省電量。總之,本次升降式系統(tǒng)設計能夠滿足定點垂直剖面水下環(huán)境數(shù)據(jù)的實時采集和傳輸要求,達到了預期的目標。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32