曲柄滑塊機構滑塊勻速運動研究
2018-08-01 07:43:16李昊軒何恒健劉浩南李岳林
食品與機械 2018年6期
李昊軒 何恒健 劉浩南 李岳林
(長沙理工大學汽車與機械工程學院,湖南 長沙 410114)
曲柄滑塊機構的作用是將曲柄的旋轉運動轉換成滑塊的往復直線運動。因此,在工業生產中得到廣泛應用[1-3],在食品加工、食品包裝的機械設備中也承擔著重要作用[4-5]。但在原動機勻速轉動的情況下,其滑塊速度和加速度按類似正弦函數關系隨時間變化[6],限制了曲柄滑塊機構在許多方面的應用。在切片、攤鋪等工作中,往往要求滑塊能夠勻速運動。文獻[7]以滑塊速度波動與平均速度的差值最小為優化目標,用粒子群算法對曲柄滑塊機構進行優化設計,在原動機勻速轉動的條件下,得到了優化的曲柄長度與連桿長度(均為固定值),但并未給出滑塊實際運動速度曲線。理論上,改變原動機的轉速變化規律,可以近似實現滑塊勻速運動,但對原動機的轉速控制非常困難,需要復雜的控制算法[8-9],且使得原動機的轉速變化非常劇烈。為避免對原動機進行復雜控制,又實現滑塊勻速運動,本研究根據曲柄滑塊機構的幾何關系,用復數矢量法分析得到曲柄長度與位置夾角的解析關系;在此基礎上,由滑塊勻速運動的期望值,求解該解析關系的差分方程,得到曲柄長度的變化規律,并設計了一種可改變曲柄長度的曲柄滑塊機構,通過SolidWorks/Motion仿真驗證其可行性。
1 曲柄長度與曲柄位置的關系
如圖1所示,設定曲柄的長度L1是隨時變化的,且以ω1的角速度勻速轉動;連桿的長度L2固定;設計目標是在機構正常工作過程中滑塊在水平方向上作勻速運動,即VC為固定速度值[10]。機構的運動分析可采用復數矢量法[11]進行推導解析。
由幾何向量關系列出機構的矢量封閉方程:
(1)
矢量封閉方程[式(1)]轉換成復數形式,可表示為:
L1eiφ1+L2eiφ2=XC。
(2)
利用歐拉公式展開式(2)得:
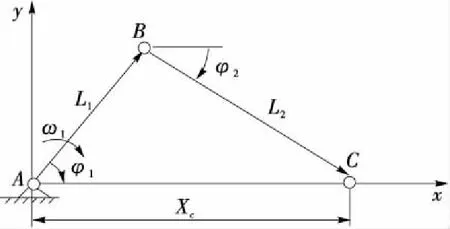
A. 表示曲柄與機架連接L1. 曲柄的長度 B. 曲柄與連桿連接L2. 連桿的長度 C. 滑塊
圖1 曲柄滑塊機構簡圖
Figure 1 Schematic diagram of slider-crank mechanism
L1sinφ1+L2sinφ2=0,
(3)
L1cosφ1+L2cosφ2=XC。
(4)
對式(2)兩端關于t求導,得:
(5)
式(5)兩邊乘上e-iφ2,展開取實部得:
(6)
將式(3)代入式(6),得:

(7)
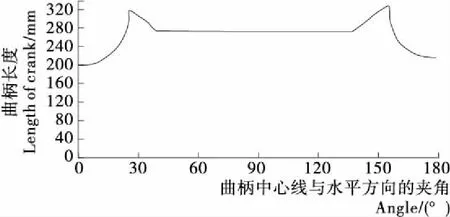
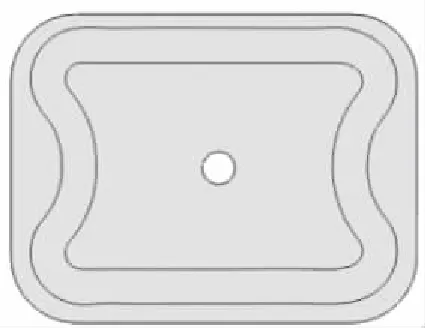
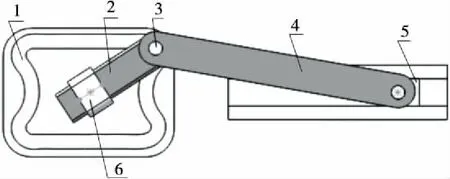
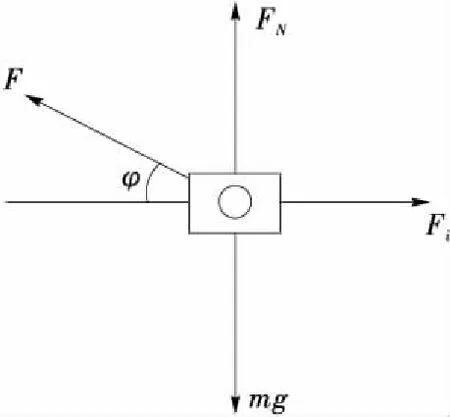
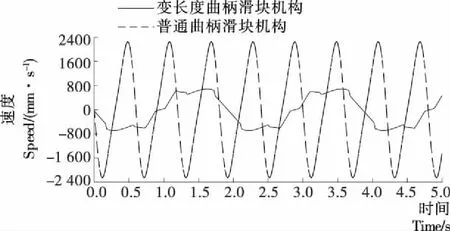
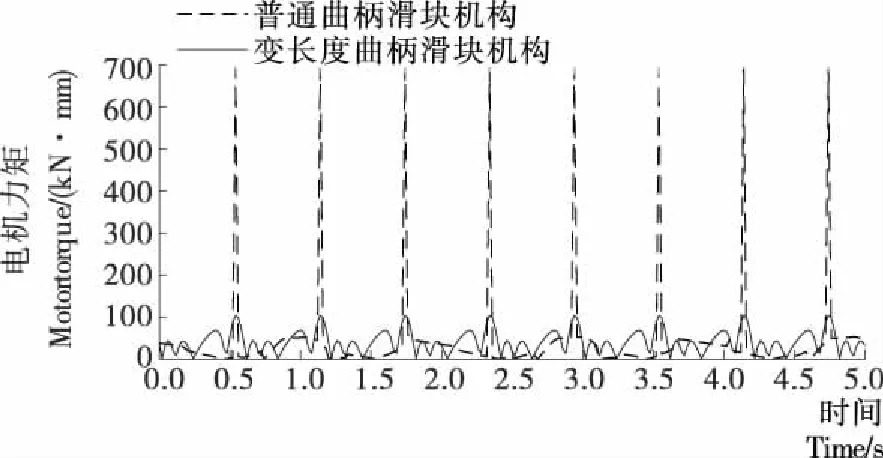
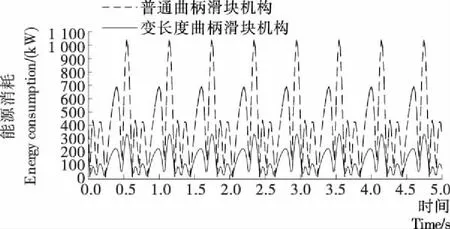
由于cosφ2>0,0 (8) 即: (9) (10) 根據曲柄長度與其所處角度的關系設計出通過帶凸輪槽以改變曲柄長度的裝置,具體結構見圖3。設計曲柄滑塊機構實現滑塊勻速運動時,在曲柄與連桿的連接處設置一個導柱,導柱隨著旋轉塊的旋轉在變曲柄長度裝置上按照凸輪槽軌跡運行,達到改變曲柄長度的效果,具體結構見圖4。 圖2 曲柄長度(L1)與曲柄位置(φ1)關系圖 圖3 變曲柄長度裝置結構示意圖 1. 變長度裝置 2. 曲柄 3. 導柱 4. 連桿 5. 滑塊 6. 旋轉塊 在對變曲柄長度的曲柄滑塊機構進行運動解析時,可選滑塊作為研究對象,依據動態靜力學理論,得到滑塊受力見圖5,平衡方程見式(11)。 Fi+F+FN+mg=0, (11) 式中: Fi——滑塊所受的合力,Fi=-ma,N; m——滑塊質量,kg; a——滑塊加速度,m/s2; F——連桿施加在滑塊上的力,N; FN——機架施加在滑塊上的力,N; g——重力加速度,m/s2。 圖5 滑塊受力圖 選取直角坐標系Oxy(圖1),將式(5)分別在x、y軸上投影得: (12) 滑塊坐標(x,y)為: (13) 由幾何關系: L1sinφ1=L2sinφ2。 (14) 化簡得: (15) 由三角函數關系得: (16) 將式(16)代入式(13)得: (17) 對時間求導 (18) 同理,再將速度對時間求導得到加速度與時間的關系表達式,在圖4所示的帶凸輪槽的曲柄滑塊機構結構示意圖中,假定連桿長度L2=500 mm(該長度值可以根據實際需要選取);曲柄長度L1按式(10)計算出的數據變化關系而改變;旋轉塊連接電機輸出軸,電機轉速為100 r/min。 通過SolidWorks/Motion軟件[12]對變長度曲柄滑塊機構與普通滑塊機構進行了對比分析。在使用SolidWorks/Motion軟件時,首先需要創建零部件、設置零部件的配合關系、設置驅動、軟件對機構進行動力學計算、生成數據圖表。普通曲柄滑塊機構與變長度曲柄滑塊機構的參數設置見表1。 變長度曲柄滑塊機構與普通滑塊機構的滑塊速度和加速度對比分別見圖6、7。圖6中的曲線表明,變長度曲柄滑塊機構在除滑塊轉換方向以外(即工作行程中)基本保持在800 mm/s 的速度。而且換向時間較短,約為0.2 s。圖7表明,變長度曲柄滑塊機構的加速度變化頻率更高,加速度變化的作用是對滑塊運行速度進行調整,從而實現滑塊勻速運動。 表1 普通曲柄滑塊機構與變長度曲柄滑塊機構的參數對比 Table 1 Comparison of the parameters between crank-slider mechanism and variable length crank-slider mechanism 機構曲柄長度/mm連桿長度/mm電機轉速/(r·min-1)普通曲柄滑塊機構 200500100變長度曲柄滑塊機構式(10)計算結果500100 圖6 不同機構中滑塊速度時間關系對比圖 圖7 不同機構中滑塊加速度時間關系對比圖 驅動電機的力矩對比見圖8,能源消耗見圖9。圖8與圖9表明,普通曲柄滑塊機構在滑塊運行方向改變時,驅動電機的力矩急劇增大,對機構造成較大的沖擊。而變長度曲柄滑塊機構力矩平緩,且能源消耗相對較低。 圖8 電機力矩對比圖 Figure 8 Diagram of motor torque in crank-slider mechanism and variable length crank-slider mechanism 圖9 能源消耗對比圖 Figure 9 Diagram of energy consumption in crank-slider mechanism and variable length crank-slider mechanism (1) 原動機勻速運行時,滑塊運行速度嚴重不均勻是曲柄滑塊機構的固有特點,本研究提出了一種曲柄滑塊機構中滑塊勻速運動的實現方法,與普通曲柄滑塊機構的仿真結果對比表明:在普通曲柄滑塊機構中增加改變曲柄長度的裝置,能夠較好地實現滑塊在每個工作行程中同一運動方向的勻速運動。 (2) 由于滑塊速度均勻性的改善,其加速度均勻性也得到很好的改善,從而有效降低了原動機的力矩突變,能源消耗明顯降低。 (3) 該方法可推廣至其他四桿機構以及復雜機構中。
2 變曲柄長度滑塊機構運動解析
3 機構動力學分析


4 結論