數字天頂儀中恒星像點軌跡的快速定位方法
2018-08-07 03:00:54劉先一張志利周召發張西輝楊上
兵工學報 2018年7期
劉先一, 張志利, 周召發, 張西輝, 楊上
(火箭軍工程大學 導彈工程學院, 陜西 西安 710025)
0 引言
隨著電荷耦合器件(CCD)的發展,數字天頂儀成為一種高精度天文定位儀器[1-2]。國外對于數字天頂儀的研究較為成熟[3-4],而國內對數字天頂儀的研究還處于樣機階段[5]。數字天頂儀通過旋轉到不同方位上進行星圖拍攝[6-7],將拍攝的恒星星圖與星表結合進行星圖識別,建立識別恒星的圖像坐標系和天球切平面坐標系之間的轉換關系,迭代數次后實現對測站點天文坐標的解算[8-9]。
目前星圖識別的方法主要有三角形星圖識別及柵格識別等方法,其中三角形星圖識別方法由于可靠性高,得到了廣泛的應用。在運用數字天頂儀進行定位時,通過三角形星圖識別方法對每一幅恒星星圖單獨進行識別[10],但是計算量較大且效率不高。國內對國外的星圖識別方法進行了借鑒,考慮到在旋轉拍攝恒星的過程中,拍攝的恒星星圖中會存在相同的恒星,同一顆恒星可能在多幅恒星星圖中出現。目前,對于恒星像點軌跡的研究較少,對星圖識別的提高大多是通過改進識別算法完成的[11-12]。本文在考慮地球自轉和儀器旋轉的條件下,推導了恒星像點的軌跡,并對恒星像點軌跡進行了修正。從恒星像點軌跡的角度研究了星圖中相同恒星的區域,基于恒星的像點軌跡提出了一種快速星圖識別方法。
1 恒星像點軌跡模型
數字天頂儀由光學望遠鏡、CCD圖像傳感器、全球定位系統(GPS)接收機、調平系統、控制系統和數據處理系統等構成,如圖1所示,數字天頂儀在定位過程中通過CCD圖像傳感器進行星圖的拍攝。
恒星星光通過數字天頂儀焦點成像于CCD圖像傳感器像平面上,恒星的像點坐標由像素表示。在拍攝過程中數字天頂儀隨著地球的自轉一起運動。理想狀態下CCD圖像傳感器的一邊與北向平行。實際情況中,CCD圖像傳感器的擺放位置與北向之間存在著夾角A. 在CCD圖像傳感器上建立圖像坐標系,以圖像傳感器的起點為原點,兩側邊緣方向為x軸和y軸。假設此時恒星在CCD圖像傳感器像平面上的坐標值為(x0,y0),將其轉化到理想狀態,如圖2所示。
進行圖像坐標的轉換,可得
(1)
下面求解恒星像點的軌跡,數字天頂儀的焦距為f,恒星像點在理想狀態下的圖像坐標可表示為(xp0,yp0)。隨著地球旋轉θ角后,恒星像點轉化到理想狀態下的圖像坐標變為(x′p0,y′p0),則有
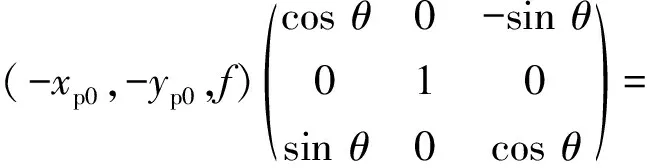
(2)
由于恒星星光可以等效為無窮遠處的平行光,在CCD圖像傳感器隨著地球旋轉的過程中,可認為恒星星光始終通過數字天頂儀的焦點,則應滿足:
(3)
可得
(4)
由于拍攝時間間隔較短,地球旋轉角θ很小,sinθ≈θ,cosθ≈1. 對(4)式進行簡化后可得
(5)
聯立(1)式和(4)式可得
(6)
數字天頂儀拍攝天頂恒星時,采用的是旋轉拍攝的方法,拍完一幅星圖后旋轉角度β進行下一幅星圖的拍攝。旋轉后恒星像點的圖像坐標為(x′,y′),則有
(7)
聯立(6)式和(7)式,化簡后可得
(8)
通過推導可知理想狀態下恒星像點的軌跡滿足(8)式,顯然恒星的像點軌跡與初始方位角A、旋轉角度β及數字天頂儀隨地球旋轉角度θ有關。
2 恒星像點軌跡的修正
天頂上的恒星經過數字天頂儀焦點成像于CCD像平面上,恒星像點的軌跡受到光軸主點偏移、焦距變化以及CCD像平面傾斜等因素的影響,因此需要對恒星像點的軌跡進行修正。
2.1 光軸主點偏移與焦距引起的軌跡修正量
在運用數字天頂儀進行定位時,數字天頂儀的光軸會發生一定的偏移,因此會帶來恒星像點的CCD圖像坐標值發生變化,則有
(9)
另外,數字天頂儀的焦距存在一定的偏差量,由f變為f+Δf. 綜合考慮光軸主點偏移及焦距所引起的恒星像點軌跡變化,則有
(10)
式中:φ為數字天頂儀的旋轉角度。
數字天頂儀每拍完一幅星圖后會旋轉一定角度進行下一幅星圖的拍攝,因此,由光軸主點偏移及焦距變化引起的恒星像點軌跡的修正量為
(11)
2.2 CCD像平面與光軸傾斜引起的軌跡修正量
運用數字天頂儀進行定位時,要對其進行精調平,但是CCD圖像傳感器在安裝過程中存在著安裝誤差等因素。另外,數字天頂儀的光軸也有一定傾斜。為了更好地研究傾斜對于恒星像點軌跡的影響,將CCD像平面的傾斜和光軸的傾斜統一表示進行研究,如圖3所示,光軸指向為z軸,在CCD圖像傳感器平面上建立x軸。
在Oxz平面內光軸與CCD像平面的傾斜值為α1,恒星星光與數字天頂儀光軸之間的夾角為ψ1,則恒星像點坐標在x軸方向上的偏差值Δx2為
(12)
ψ1和α1都屬于小角度,化簡后可得
Δx2=fα1.
(13)
同理,可得恒星像點坐標在y軸上的偏差值Δy2為
Δy2=fα2,
(14)
式中:α2為在Oyz平面內光軸與CCD像平面的傾斜值。
綜上所述可知,由于光軸偏移、焦距變化及傾斜引起的恒星像點軌跡的偏差值為Δx′0=Δx1+Δx2、Δy′0=Δy1+Δy2,則對恒星像點的軌跡進行修正后可以得出實際的像點軌跡為
(15)
3 快速星圖識別方法
當儀器旋轉一定角度后,為了使星表中的同一顆恒星能夠在下一幅恒星星圖中出現,必須保證兩輻星圖間CCD圖像傳感器重合的面積。則有
(16)
式中:h表示CCD圖像傳感器的單邊長度。對(16)式化簡后,可得
(17)
當拍攝的恒星像點CCD圖像坐標滿足(17)式時,在旋轉后拍攝的星圖中這些恒星將再次出現。如果能夠保證拍攝的恒星星圖中有相同恒星的數量,則對于提高星圖識別的速度和效率將具有較大的意義。數字天頂儀的工作流程為:先順時針旋轉拍攝8幅星圖,然后逆時針旋轉拍攝8幅星圖,即在一個定位循環中,數字天頂儀拍攝的星圖數量為16幅,如圖4所示,這里旋轉角度為π/4 rad.
在進行定位解算時,單幅星圖識別的恒星數量一般約為25顆。當識別的恒星數量達到10顆左右時,數字天頂儀的定位精度就基本保持穩定[7],即恒星星圖中含有冗余的恒星星點。考慮到在旋轉前后拍攝的恒星星圖中含有較多相同的恒星,如果在星圖識別的過程中只運用星表對其中的一幅星圖進行識別,其余的星圖以識別出的星點作為簡化星表再進行識別,則將使星圖識別更具有針對性,并減少了參與星圖識別的恒星數量,從而提高星圖識別的效率和速度。為了使相同恒星區域內的恒星數量滿足定位要求,相同恒星的區域面積至少應達到CCD像平面面積的40%以上,這樣才能夠保證相同區域的恒星數量達到10顆左右。在運用數字天頂儀拍攝星圖的過程中,一個定位循環要拍攝的星圖為16幅,其中拍攝的第8幅星圖和第9幅星圖實際上是在一個位置上的,且在拍攝的過程中第8幅星圖和第9幅星圖之間的時間間隔實際上是相對較短的[13]。
為了實現只對其中一幅星圖進行識別的目標,選取拍攝中間的第9幅(或第8幅)星圖與星表結合進行識別,其余星圖運用第9幅星圖識別出來的恒星作為簡化星表再進行星圖識別。由(17)式可知,相同恒星的區域是與地球轉動角度相關聯的,即與拍攝的時間間隔有關。為保證其余星圖與第9幅星圖中含有相同恒星的數量,必須有效控制兩幅恒星星圖之間的拍攝時間間隔。為了簡化運算,假設數字天頂儀在位置8拍攝恒星星圖后繼續旋轉π/4 rad拍攝,此時,必須保證拍攝的星圖與第1幅星圖之間的重合面積,則有
(h-|fθcosA|)(h-|fθsinA|)>kh2,
(18)
式中:k為兩幅星圖重合的面積系數。
對(18)式進行一定的縮放處理,將|fθcosA|和|fθsinA|均取值為fθ,簡化后可得
(h-fθ)2>kh2,
(19)
可得總的時間間隔值t滿足:
(20)
式中:k取值為0.4,可以解得時間間隔值t為310.5 s,則兩幅恒星星圖之間的拍攝時間間隔Δt<45 s. 另外,考慮到在旋轉過程中電機的轉動以及雙軸傾角儀的傾角讀取等因素的時間限制,又不能使旋轉拍攝的時間間隔太短[14-16]。根據儀器參數可知至少要保證時間間隔Δt>30 s. 因此,為了對星圖識別進行簡化,從而提高星圖識別的速度,必須保證兩幅星圖之間的拍攝時間間隔滿足30 s<Δt<45 s.
4 試驗數據分析
試驗過程中采用的數字天頂儀視場角大小為3°×3°,焦距值為(600±4) mm. CCD采用KAF-16803全畫幅圖像傳感器,分辨率為4 096×4 096,像素大小9 μm,有效面積36.8 mm×36.8 mm. 試驗過程中,恒星星圖的拍攝時間間隔約為40 s,從而在進行定位時可以只通過恒星星表對第9幅星圖進行識別,之后運用第9幅星圖識別出來的恒星對其余拍攝的星圖再進行識別,這樣不僅對星表進行了簡化,減少了參與星圖識別的數量,而且使星圖識別更具有針對性,提高了星圖識別的速度。拍攝的其中一幅星圖如圖5所示。
由于篇幅所限,在這里只給出對其中任意相鄰兩幅星圖進行識別得到的星點數據。表1所示為將旋轉前拍攝的星圖和旋轉π/4 rad后拍攝的星圖與依巴谷星表結合識別出的星點數據。
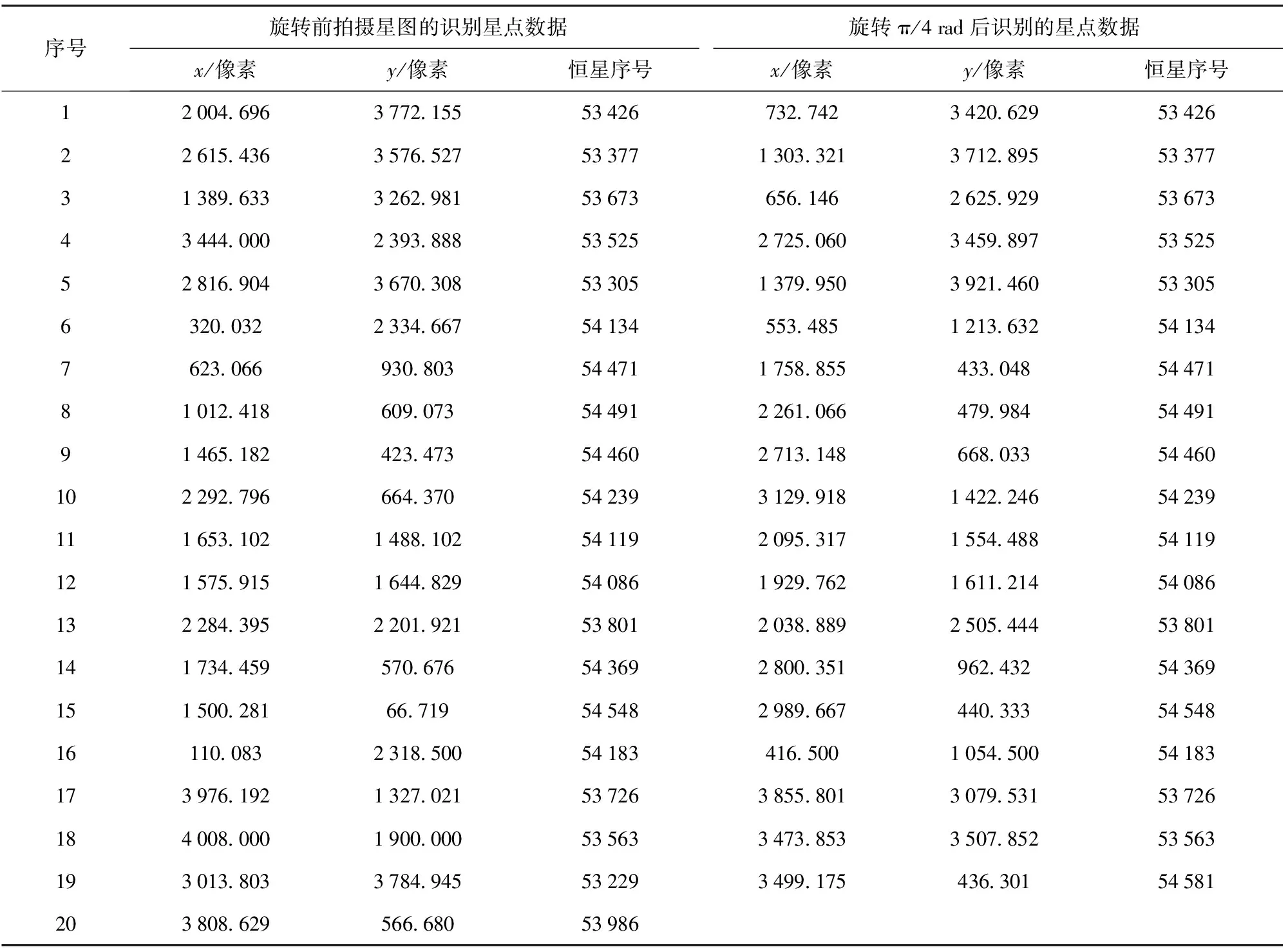
表1 識別的星點數據
表1的恒星序號是指識別出的恒星在依巴谷星表中的序號。由于恒星在星表中的序號是固定不變的,從表1中可知在兩幅恒星星圖中存在著許多相同的恒星。結合(17)式,并將表1中識別的恒星數據直觀地顯示出來,可以得出圖6所示的示意圖。表明當恒星像點的CCD圖像坐標處于圖6中所示的陰影部分時,在旋轉后拍攝的星圖中這些恒星將再次出現。圖6中的數據分布與表1所示的結果完全一致。
分別采用快速星圖識別方法和改進前的星圖識別方法對拍攝的一個定位循環星圖進行分析,可以得出識別恒星的數量,如表2所示。
對拍攝的多個定位循環進行解算,得到的天文經緯度坐標如圖7所示。
對試驗數據進行分析可得,改進前的星圖識別方法解算單個定位循環的經度精度為0.281″,緯度精度為0.265″,采用快速星圖識別方法解算的經度精度為0.283″,緯度精度為0.262″. 顯然,采用快速星圖識別方法解算出來的天文經緯度精度與運用恒星星表進行星圖識別解算的天文經緯度精度基本一致。
在一個定位循環中,數字天頂儀拍攝的星圖數量為16幅,采用改進前的星圖識別方法,對拍攝的16幅星圖進行識別的時間為5 min左右,但是采用快速星圖識別方法后,星圖識別的時間只需要約2 min,從而在保證定位精度的情況下大大地縮短了定位的時間。
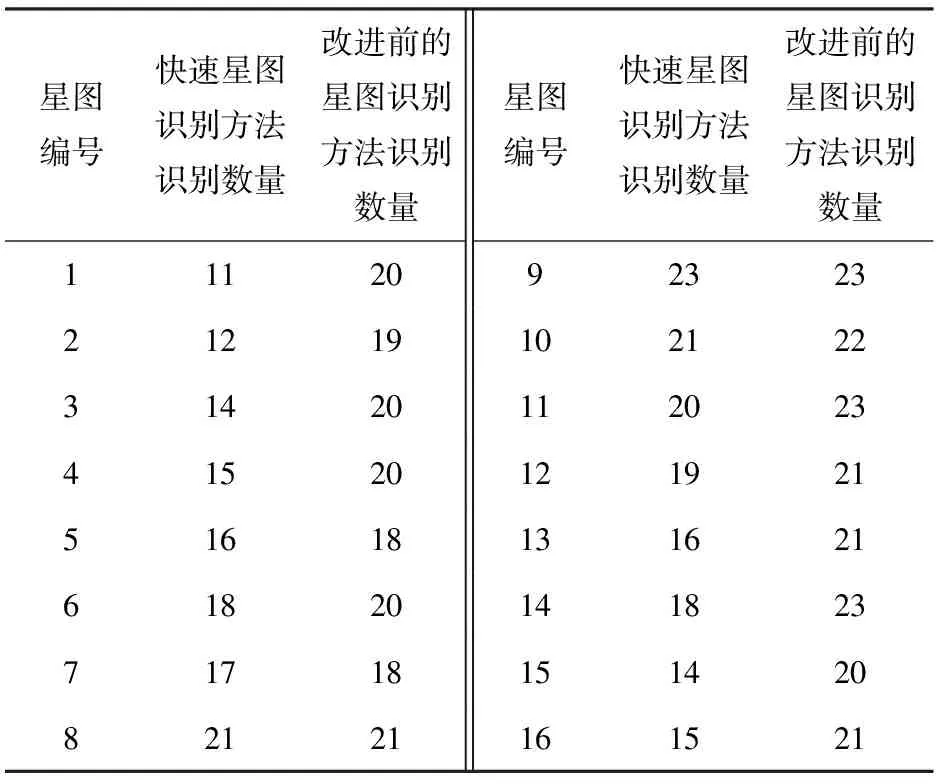
表2 識別恒星數量
5 結論
數字天頂儀通過旋轉進行恒星星圖的拍攝,通過對拍攝的星圖進行識別,解算出測站點的天文經度坐標。在一個定位循環中,星圖識別的計算量大,需要較長的時間。通過分析可知:
1)只結合恒星星表對單個定位循環中間的一幅恒星星圖進行識別,其余星圖以該幅星圖識別出的恒星為簡化星表再進行識別,使定位精度基本保持不變的情況下顯著提高了星圖識別的速度。
2)經與改進前的星圖識別方法的試驗對比,所提方法的星圖識別時間從5 min減少到只需要約2 min.