基于BP神經網絡的立體車庫存取車控制模型優化研究
2018-08-11 03:34:06廖易侖桂林智神信息技術公司有限公司劉德智程小輝通訊作者汪彥君桂林理工大學信息科學與工程學院
數碼世界 2018年7期
廖易侖 桂林智神信息技術公司有限公司 劉德智 程小輝(通訊作者) 汪彥君 桂林理工大學信息科學與工程學院
引言:中國的經濟快速發展,我國的城市的交通也是快速地發展,傳統停車位不能滿足人們的停車需求的現象也由此而產生了。立體車庫的設計及出現,可以及時地解決停車難問題。我國這幾年工業發展也很快,選購私家車的家庭逐年增多,我國又是人口大國,所以也是擁有汽車最大的國家之一。在一些地方,如居民小區和寫字樓密集區域要解決這些地方的停車難問題,最直接,最快速的方法是多建一些立體車庫。堆垛式立體車庫可設置于地上或地下,充分利用有效空間。但其實用性較升降橫移式立體車庫差,高峰期依次取車時間過長,甚至超過30分鐘。
本文根據BP神經網絡對堆垛式立體車庫進行存取車調度進行優化,根據堆垛式立體車庫的特點,對BP神經網絡網絡參數中的初始值進行確定,選定合適的學習率、動量因子,對某一時段車庫存取車的耗時總時間進行優化。
1 堆垛式立體車庫的結構及工作原理
堆垛式立體車庫采用巷道堆垛機或橋式起重機將載車板上的車輛水平和垂直移動到存車位,并用存取機構存取車輛的機械式停車設備。堆垛式立體車庫的結構特點為,通過控制升降機構的上下移動、橫移機構的前后移動以及存取車輛的行走小車的左右移動,由這三個方向(X,Y,Z)的相互配合實現車輛的存車與取車功能。立體車庫內的堆垛機利用堆垛機載車平臺上的載車板將汽車連同載車板移送至該車位或將車位里存入的汽車移送至堆垛機載車平臺上再由堆垛機運送至地面出口處,其主視圖與左視圖如圖1所示,為5*3*3的堆垛式立體車庫,可存取30輛車。
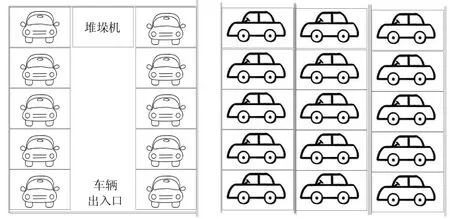
圖1 車庫結構圖
2 PLC控制系統存取車流程
對于PLC來說,其主要任務是要完成存放車輛和取出車輛,以及檢測載車板的運行狀態和載車板即時的位置。所用狀態元件、定時器及數據存儲器均選用具有掉電保護功能的元件,當系統掉電時元件保持掉電前的狀態,保證整個立體車庫的安全。立體車庫存車流程如圖2所示。立體車庫取車流程如圖3所示。
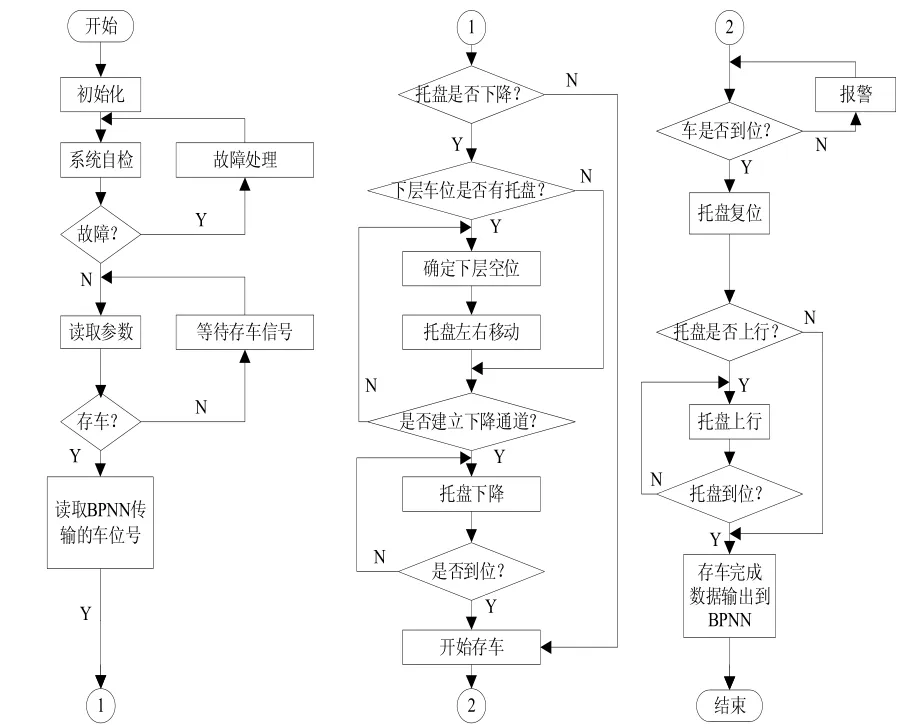
圖2 存車流程圖
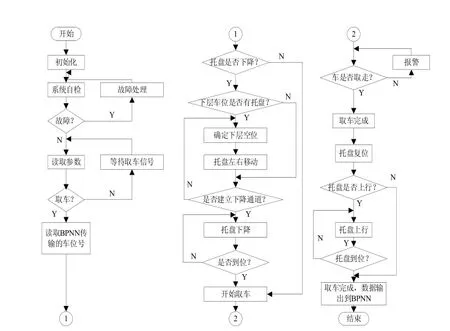
圖3 取車流程圖
3 BP神經網絡實現存取車模型優化
3.1 存取車策略
各類型立體車庫的存取車模型優化問題采用的方法很多,如基于排隊論的存車優先、取車優先等不同的存取車策略;而采用基于BP神經網絡進行優化,可達到總存取時間最少。為分析存取模式下堆垛機的運行時間,我們選取相同的存取次數,特定義目標函數為k次存取車操作所需的總時間∑ T。
設(a,b)為堆垛機現在的位置坐標;(c,d)為堆垛機即將執行操作的車位坐標;(e,f)為堆垛機上一次操作的車位坐標;tx,tz為堆垛機沿X軸和Z軸每運動一個車位所需的時間;ty為堆垛機在X—Z平面上到達指定坐標后,載車板沿Y軸執行存取操作所需時間,設為常數。其中,堆垛機沿X方向和沿Z方向上可同時運動,且不考慮其加減速動作所用的時間。則存取一輛車所需時間:

連續存取車所需要的總時間為∑T,則

3.2 BP神經網對存取車時間優化
BP神經網絡主要由輸入層、隱含層和輸出層構成,如圖4所示。輸入層的各神經元負責接受來操作系統及PLC輸出作為輸入信息,輸入變量的個數取決于被控系統的復雜程度。神經網絡的隱含層是信息處理中心,負責進行信息變換。輸出層是神經網絡向PLC輸出信息處理結果。理論上講,BP算法采用梯度下降的方法進行搜尋,計算目標函數值,進行比較,確定出一個時間最優值,并傳遞給PLC執行。

圖4 BP神經網絡組成
BP 神經網絡的學習過程如下:
(1)、網絡結構及學習參數的確定:輸入層、隱含層和輸出層的神經元的數目、學習率、誤差容限、動量因子、最大迭代次數。
(2)、網絡狀態初始化: 用較小的隨機數(絕對值小于1)對網絡權值、閾值置初值。
(3)、提供學習樣本:輸入向量和輸出向量。
(4)、學習過程:權值的修改

式中:ρ為學習率,σ為動量因子。
使用BP 神經網絡對立體車庫的存取車策略進行優化,找到較好的存取車耗時,將耗時少的存取車順序傳遞給PLC,從而達到良好的存取車時間策略。當PLC進行存取車操作時,BP神經網絡不像其傳輸信號,當PLC結束存取車操作時,BP神經網絡對其傳輸信號。
3.3 基于BP網絡的存取車控制模型
由于廠商沒有提供PLC系統的神經網絡模塊或指令庫。對于BP神經網絡的研究或應用仍采用PC平臺。現有技術必須首先從PLC系統等控制設備中獲取過程數據,完成BP神經網絡的訓練,建立模型,根據模型進行預報,最后根據預報結果修改控制參數或控制量,將結果再回傳到PLC,由PLC系統優化控制等任務。故立體車庫存取車控制模型采用BP神經網絡將最優耗時輸出到PLC,PLC對立體車庫存取車進行控制,其存取車流程如第二章所示。其中,當PLC進行存取車操作時,神經網絡不輸出信號,待PLC完成存取車操作時,BP神經網絡再輸出信號到PLC,對其進行控制,達到安全控制立體車庫的目的。控制模型如圖5所示。

圖5 基于BP神經網絡優化的存取車控制模型
3 結論
本文基于BP神經網絡設計的立體車庫存取車優化模型優化,可以對存取車順序進行數據采集、存儲、分析并進行自主學習,當有大量用戶同時存取車時,能夠設計出優化的汽車存取順序,以減少用戶使用立體車庫存取車時間。大多數情況下,使用神經網絡得到的結果要優于PLC控制方法,能夠適用于影響因素多、變化大的場合。通過以上研究,使用神經網絡BP算法對立體車庫存取車控制模型優化是可以實現的,可以BP將神經網絡應用于此。
本論文的研究由廣西重點研發計劃(桂科AB17195042)支持,我們致以誠摯的感謝。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
