簡析平面機構(gòu)自由度的計算方法
2018-08-11 03:34:08金英達于曉文周三合沈陽工學院機械與運載學院
數(shù)碼世界 2018年7期
金英達 于曉文* 周三合 沈陽工學院機械與運載學院
1 平面機構(gòu)自由度和約束的概念
1.1 平面機構(gòu)的自由度
作平面運動的構(gòu)件相對于定參考系所具有的獨立運動的數(shù)目,稱為構(gòu)件的自由度。因此一個作平面運動的自由構(gòu)件具有三個自由度。
1.2 約束
對非自由體的運動所加的限制稱為約束。
構(gòu)件之間組成運動副后,由于獨立運動受到限制,因而其自由度便隨之減少。每加上一個約束,構(gòu)件便失去一個自由度。平面低副均引入2個約束,平面高副引入1個約束,且自由度減少的數(shù)目等于約束的數(shù)目。
2 平面機構(gòu)自由度的計算公式
設平面機構(gòu)中活動構(gòu)件數(shù)目為 ,形成運動副之前共有3 個自由度。若機構(gòu)中有個低副,則自由度減少個;若機構(gòu)中有 個高副,則自由度減少個。因此,活動構(gòu)件自由度總數(shù),扣除因形成運動副而減少的自由度,剩下的自由度即為機構(gòu)的自由度,以表示,即

這就是計算平面機構(gòu)自由度的公式。由公式可知,機構(gòu)自由度取決于活動的構(gòu)件數(shù)目以及運動副的性質(zhì)(低副或者高副)和個數(shù)。
3.計算平面機構(gòu)自由度時應注意的幾個問題
3.1 復合鉸鏈:由兩個以上構(gòu)件在同一處構(gòu)成的
重合轉(zhuǎn)動副稱為復合鉸鏈。由 個構(gòu)件匯聚而成的
圖1所示壓力機構(gòu)的自由度計算為:


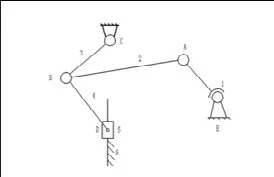
圖1 壓力機構(gòu)運動簡圖
3.2 局部自由度:機構(gòu)中與輸出構(gòu)件運動無關(guān)的自由度,稱為局部自由度。
如圖2所示平面滾子傳動件盤形凸輪機構(gòu)中,滾子繞其自身軸線的轉(zhuǎn)動為機構(gòu)的局部自由度,在計算機構(gòu)的自由度時,應預先將轉(zhuǎn)動副除去不計,或設想將滾子與從動件固聯(lián)在一起作為一個構(gòu)件來考慮。


則圖2 凸輪機構(gòu)運動簡圖
3.3 虛約束:這種重復對構(gòu)件運動形成限制作用的約束或不起獨立限制作用的約束稱為虛約束。在計算機構(gòu)自由度時,應從機構(gòu)的約束數(shù)中減去虛約束數(shù)。
如圖3所示的凸輪-連桿組合機構(gòu)中,在B處
滾子與凸輪機構(gòu)成高副,滾子引入一局部自由度,應除去;在F和F`兩處,豎桿與機架組成導路平行的移動副,引入一虛約束,應除去。

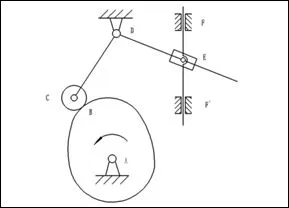
則圖3 凸 輪-連桿機構(gòu)運動簡圖
應當注意,虛約束對機構(gòu)的幾何條件要求較高,因此對機構(gòu)的加工和裝配提出了較高的要求,從機構(gòu)的運動觀點來看是多余的,但能增加機構(gòu)的剛性,改善其受力狀況,因而被廣泛采用。
4 結(jié)論
當機構(gòu)自由度按照上面方法計算完后,即可用此來判斷機構(gòu)的運動是否確定。機構(gòu)的運動是否確定取決于其自由度數(shù)目以及它和原動件數(shù)目之間的關(guān)系。當自由度F>0時,自由度數(shù)與原動件數(shù)之間的關(guān)系有三種情況:
自由度數(shù)>原動件數(shù)時,機構(gòu)的運動不能確定;
自由度數(shù)<原動件數(shù)時,機構(gòu)將在薄弱環(huán)節(jié)被破壞;
自由度數(shù)=原動件數(shù)時,機構(gòu)的運動完全確定。
綜上所述,通過一個原動件輸入一個運動規(guī)律,必然限制機構(gòu)的一個運動自由度。因此,只有當F>0,且原動件數(shù)目等于自由度時,機構(gòu)才能具有確定的相對運動。
