城軌門系統接觸參數實驗獲取方法研究
2018-08-13 09:43:36貢智兵王祖進
軟件 2018年7期
關鍵詞:實驗
貢智兵,王祖進
?
城軌門系統接觸參數實驗獲取方法研究
貢智兵,王祖進
(南京康尼股份有限公司,江蘇 南京 210038)
在城軌門系統動力學仿真過程中需要對接觸參數進行不斷修正,以提高門系統仿真精度。為了使門系統仿真更精確、符合實際工況,設計了實驗裝置,對門系統中主要接觸副的接觸剛度和接觸阻尼通過實驗和仿真相結合的方法獲取。獲取接觸參數后,在同類門系統仿真過程中不再需要對接觸參數的值進行多次修正,提高了門系統仿真的精度。
城軌門系統;虛擬樣機;實驗裝置;接觸參數
0 引言
軌道車輛門系統[1]虛擬樣機模型是一個復雜的多體動力學仿真模型,其中傳動系統和導向系統中相對運動零部件間的接觸對是影響建模精度的主要因素,而接觸對本身的仿真精度主要由接觸剛度和接觸阻尼決定。
目前文獻中對接觸剛度的測量主要有兩種測量方法:一種是直接法[2-3],就是直接測量接觸面間的負載和位移,然后得到剛度;另一種方法是間接法[4-5],就是測量某個物理量,然后通過該物理量跟接觸剛度之間的關系間接求得接觸剛度,例如超聲測量[6]和接觸諧振測量[7]。接觸阻尼的測量主要是采用間接測量法,也就是測量某個物理量,然后通過該物理量和接觸阻尼之間的關系求得接觸阻尼,例如對振動信號進行分析,提取諧振頻率,通過諧振頻率和阻尼間的對應關系得到接觸阻尼值[8];又例如通過繪制“載荷-位移”曲線,即遲滯回線來表征接觸阻尼特性[9-10]。
上述接觸剛度直接測量法的缺點是只能測量接觸剛度,無法測得接觸阻尼;間接測量方法得到的接觸剛度和接觸阻尼值的精度取決于間接量的實驗精度,后續數據推導過程中也會引入理想假設誤差,最終得到的剛度和阻尼值的精度很難評估,而且實驗測得到的剛度和阻尼值是用于仿真建模的,仿真中直接采用實驗值很難得到高精度的模型。此外,上述方法測量的接觸對象都是平板類零件和球形零件,不適用于絲桿螺旋傳動等特殊類型接觸。
因此,本文對接觸剛度和接觸阻尼進行直接測量,通過實驗和仿真相結合的方法得到接觸剛度值和接觸阻尼值。
1 實驗裝置
對門系統中的接觸副進行定義,具體包括:鎖閉組件和絲桿間的接觸、尼龍滾輪和上滑道間的接觸、擺臂滾輪和下導軌間的接觸。
為了獲取鎖閉組件和絲桿間的接觸參數、擺臂滾輪和下導軌間的接觸參數、尼龍滾輪和上滑道間的接觸參數,設計了下圖所示的接觸參數獲取實驗裝置。鎖閉組件和絲桿間的接觸參數實驗裝置包括:絲桿、鎖閉組件、重物塊、直線軸承、長導柱、運動滑塊、尼龍繩、微動開關、計時裝置等。滾輪和導軌間接觸參數實驗裝置包括:滑筒組件、攜門架、機架、掛架、上滑道、下導軌、長導柱、尼龍繩、重物塊、微動開關、計時裝置等。

圖1 鎖閉組件和絲桿間接觸參數實驗裝置

圖2 滾輪和導軌間接觸參數實驗裝置
2 實驗原理
使用重物塊通過鋼絲繩拉動鎖閉組件在絲桿上做直線運動,測量鎖閉組件從絲桿的一端運動到另一端的時間間隔。然后在RecurDyn軟件中建立相同的動力學仿真模型[11-14],絲桿和鎖閉組件間建立接觸對。
使用重物塊通過鋼絲繩拉動滑筒在長導柱上做直線運動,通過配重塊對掛架施加的拉力來增大滾輪和導軌間的正壓力,測量滑筒從長導柱的一端運動到另一端的時間間隔。然后在RecurDyn軟件中建立相同的動力學仿真模型,滾輪和導軌間建立接觸對。
通過調整接觸參數,實現仿真模型的運動時間間隔和實際物理樣機的運動時間間隔相等,從而得到絲桿和鎖閉組件間接觸對的參數、滾輪和導軌間接觸對的參數。改變重物塊的重量對接觸參數進行驗證,根據驗證結果對接觸參數進行微調,最終得到接近實際接觸效果的參數組合。
3 物理實驗
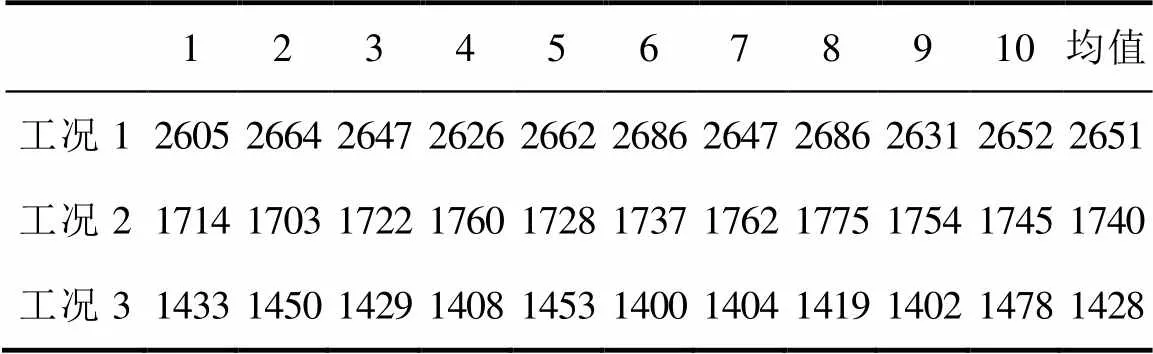
實驗1,標定長導柱和運動滑塊間的摩擦系數。斷開鎖閉組件與運動滑塊間的連接,讓重物塊僅拉著運動滑塊沿長導柱運動,測量運動時間間隔。分2種工況進行,工況1:重物塊為2.5N,滑塊運動10次,記錄運動時間間隔;工況2:重物塊為5N,滑塊運動10次,記錄運動時間間隔。實驗數據如表1所示。
表1 實驗1(運動時間間隔,單位:ms)
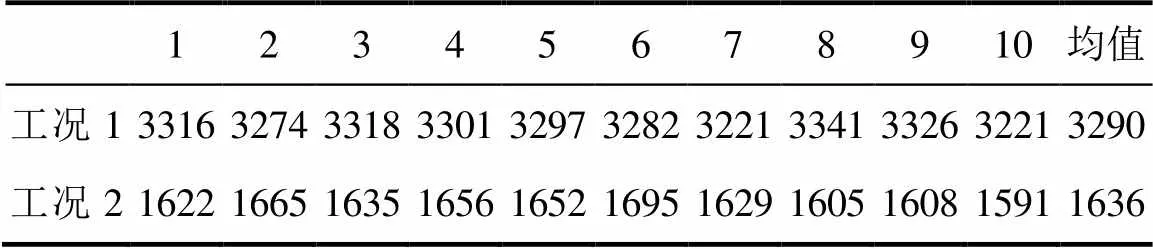
Tab.1 Experiment 1 (motion time interval, unit: ms)
實驗2,獲取塑料螺母和絲桿間的接觸參數。鎖閉組件中僅塑料螺母與絲桿接觸,讓重物塊拉著運動滑塊沿長導柱運動,測量運動時間間隔。分2種工況進行,工況1:重物塊為10N,滑塊運動20次,記錄運動時間間隔;工況2:重物塊為12.5N,滑塊運動20次,記錄運動時間間隔。實驗數據如表2所示。
實驗3,獲取滾動銷和絲桿間的接觸參數。鎖閉組件中僅滾動銷和銅套與絲桿接觸,讓重物塊拉著運動滑塊沿長導柱運動,測量運動時間間隔。分3種工況進行,工況1:重物塊為10N,滑塊運動20次,記錄運動時間間隔;工況2:重物塊為12.5N,滑塊運動20次,記錄運動時間間隔;工況3:重物塊為15N,滑塊運動20次,記錄運動時間間隔。實驗數據如表3所示。
表2 實驗2(運動時間間隔,單位:ms)
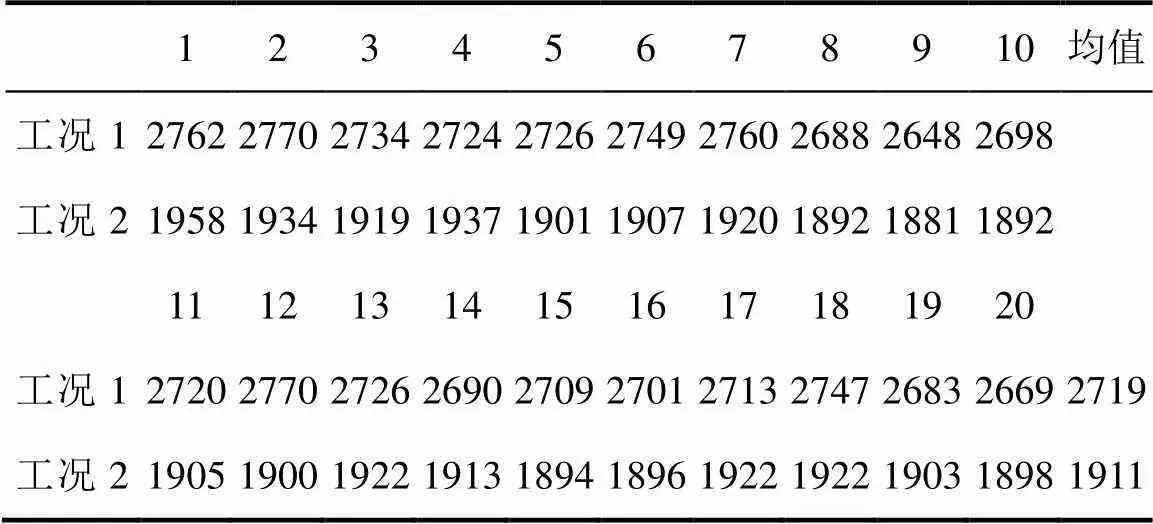
Tab.2 Experiment 2 (motion time interval, unit: ms)
表3 實驗3(運動時間間隔,單位:ms)
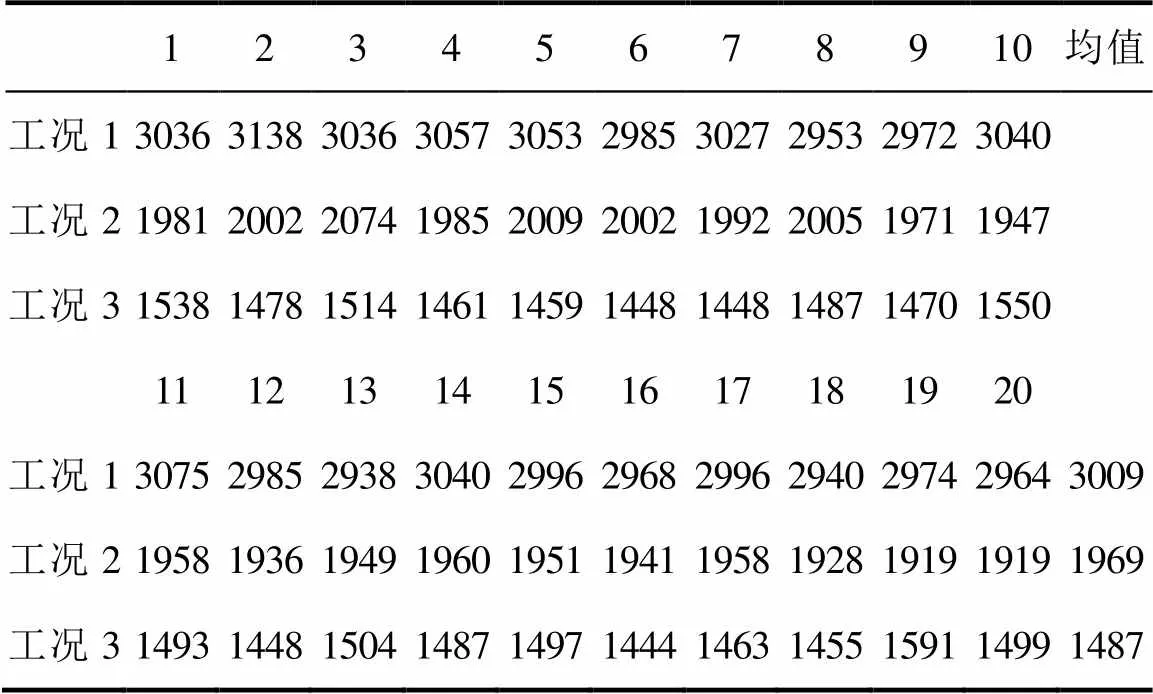
Tab.3 Experiment 3 (motion time interval, unit: ms)
實驗4,驗證鎖閉組件和絲桿間的接觸參數。鎖閉組件與絲桿接觸,讓重物塊拉著運動滑塊沿長導柱運動,重物塊為40N,滑塊運動20次,記錄運動時間間隔。實驗數據如表4所示。
表4 實驗4(運動時間間隔,單位:ms)
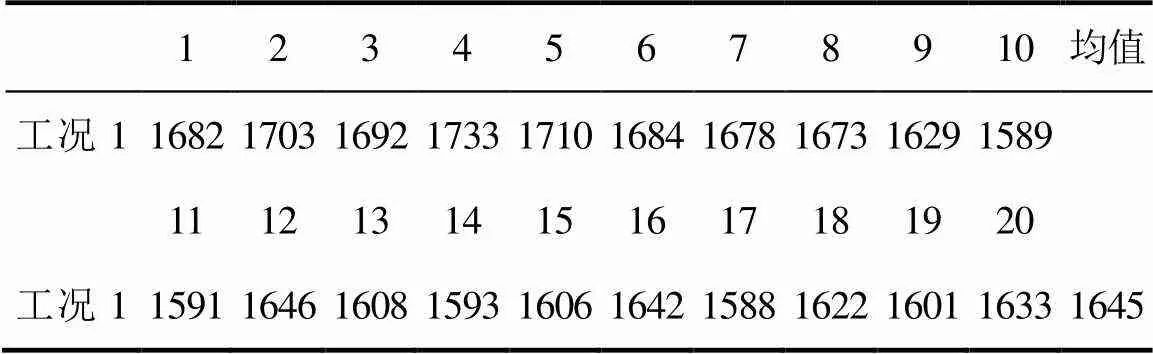
Tab.4 Experiment 4 (motion time interval, unit: ms)
實驗5,獲取下導軌和擺臂滾輪間的接觸參數。實驗裝置中共有兩個接觸對,均為下導軌和擺臂滾輪間的接觸。讓重物塊拉著滑筒沿長導柱運動,測量運動時間間隔。分3種工況進行,工況1:兩個配重塊分別為20N,重物塊為5N,滑筒運動10次,記錄運動時間間隔;工況2:兩個配重塊分別為20N,重物塊為5N,滑筒運動10次,記錄運動時間間隔;工況3:兩個配重塊分別為20N,重物塊為10N,滑筒運動10次,記錄運動時間間隔。實驗數據如表5所示。
表5 實驗5(運動時間間隔,單位:ms)
Tab.5 Experiment 5 (motion time interval, unit: ms)
實驗6,獲取上滑道和尼龍滾輪間的接觸參數。實驗裝置中共有兩個接觸對,一個為下導軌和擺臂滾輪間的接觸,另一個為上滑道和尼龍滾輪間的接觸。讓重物塊拉著滑筒沿長導柱運動,測量運動時間間隔。分4種工況進行,工況1:兩個配重塊分別為20N,重物塊為5N,滑筒運動5次,記錄運動時間間隔;工況2:兩個配重塊分別為20N,重物塊為10N,滑筒運動5次,記錄運動時間間隔;工況3:兩個配重塊分別為10N,重物塊為5N,滑筒運動10次,記錄運動時間間隔;工況4:兩個配重塊分別為10N,重物塊為7.5N,滑筒運動10次,記錄運動時間間隔。實驗數據如表6所示。
表6 實驗6(運動時間間隔,單位:ms)
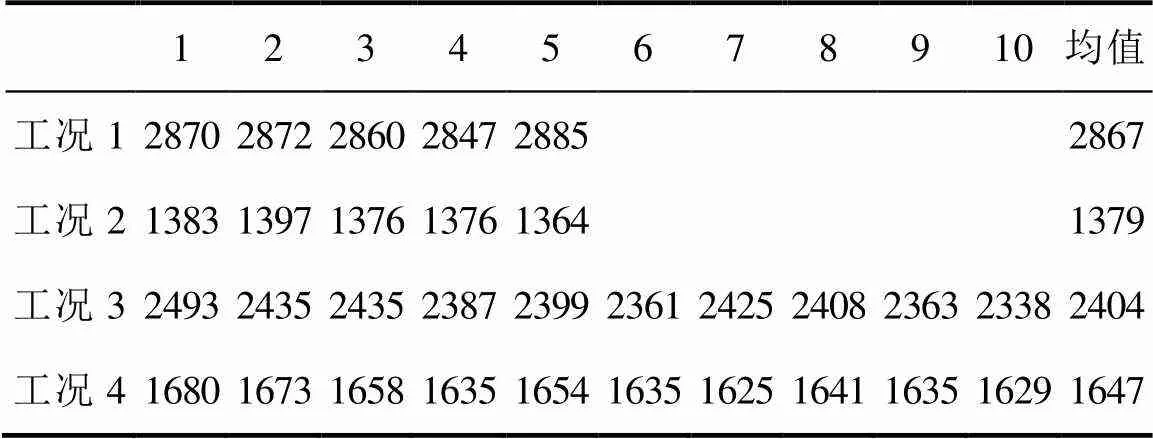
Tab.6 Experiment 6 (motion time interval, unit: ms)
4 仿真實驗
根據實驗1的實驗數據,對仿真模型(圖3)進行調試和驗證,得到運動滑塊與長導柱間的摩擦系數為0.0204。
根據實驗2的實驗數據,對仿真模型(圖4)進行調試和驗證,得到塑料螺母與絲桿間的接觸參數。
根據實驗3的實驗數據,對仿真模型(圖5)進行調試和驗證,得到滾動銷與絲桿間的接觸參數以及銅套與絲桿間的接觸參數。
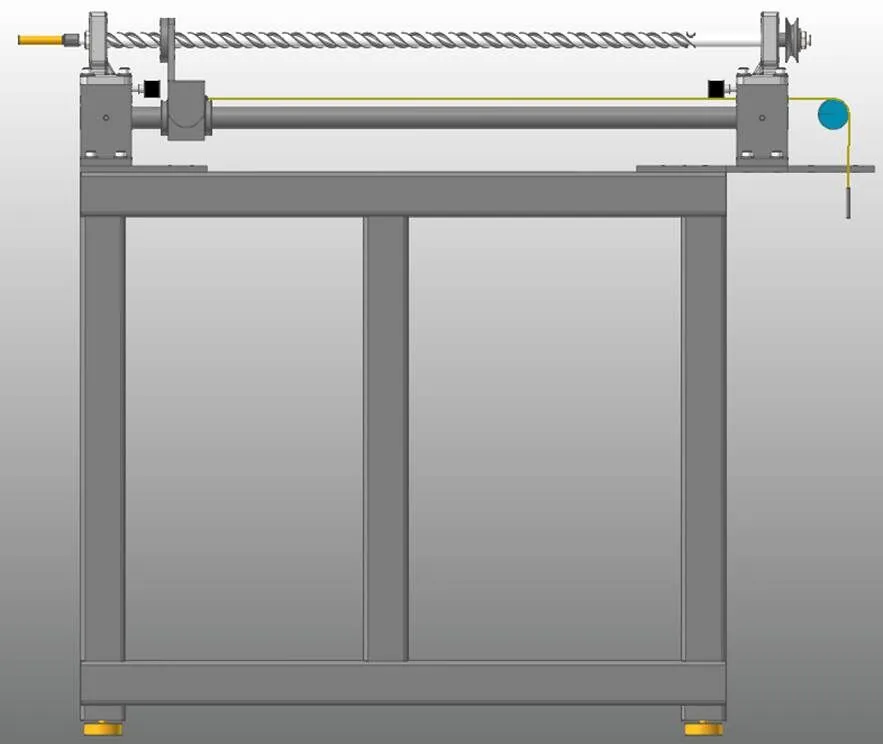
圖3 仿真模型1
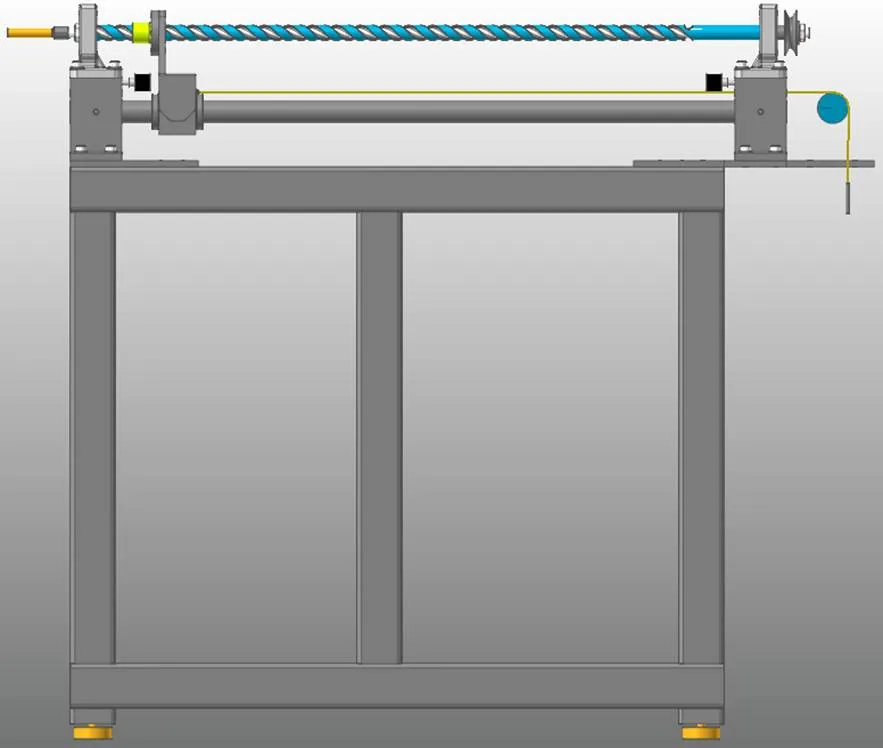
圖4 仿真模型2
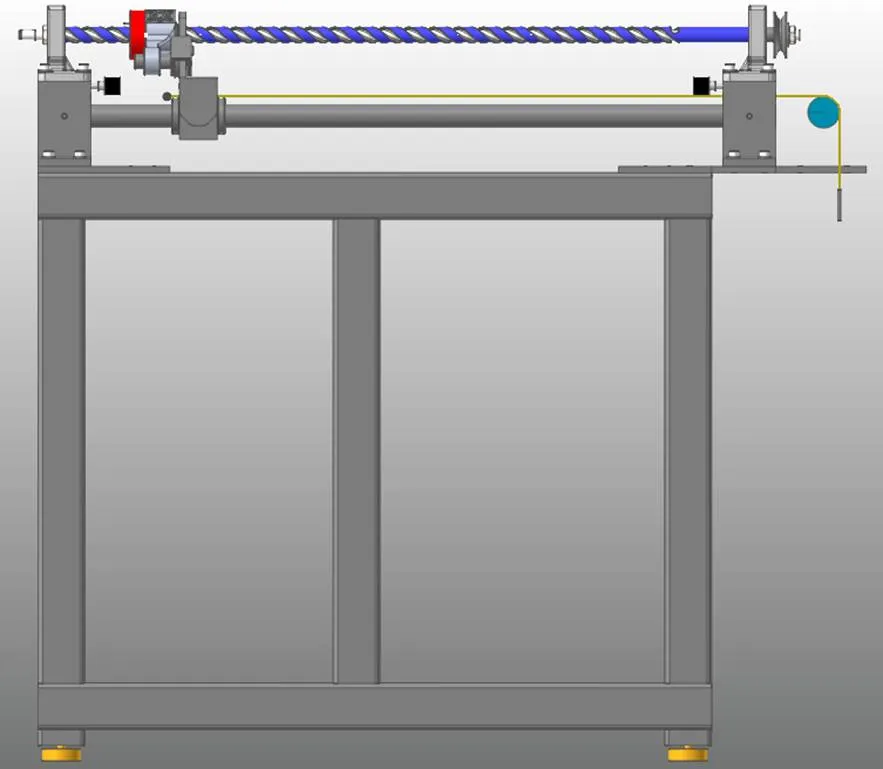
圖5 仿真模型3
根據實驗4的實驗數據,對仿真模型(圖6)進行調試和驗證,對鎖閉組件與絲桿間的接觸 參數進行驗證,并根據驗證結果對接觸參數進行 修正。
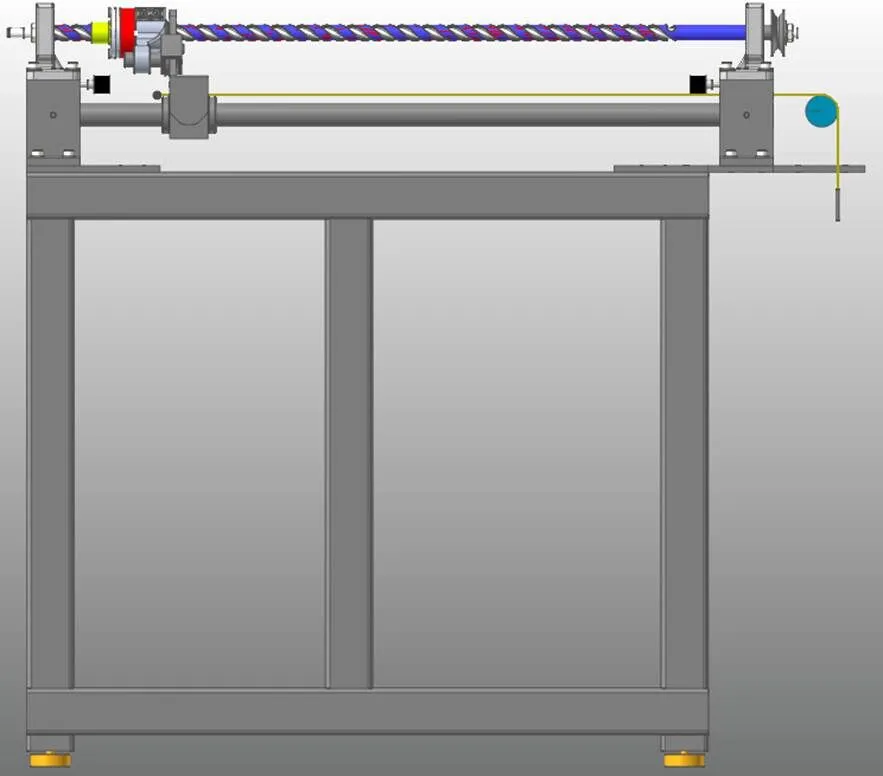
圖6 仿真模型4
根據實驗5的實驗數據,對仿真模型(圖7)進行調試和驗證,得到下導軌和擺臂滾輪間的接觸參數。
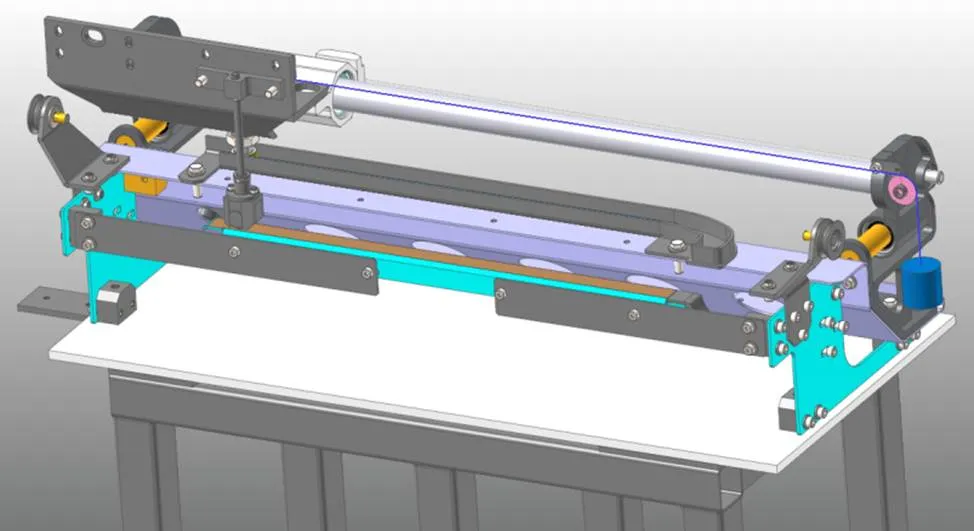
圖7 仿真模型5
根據實驗6的實驗數據,對仿真模型(圖8)進行調試和驗證,得到上滑道和尼龍滾輪間的接觸參數。
5 實驗結果
根據上述接觸實驗結果,對接觸參數進行設置,如表7所示,其中K為接觸剛度、C為接觸阻尼、ud為動摩擦系數、us為靜摩擦系數、d為最大穿透深度、e為剛度指數。
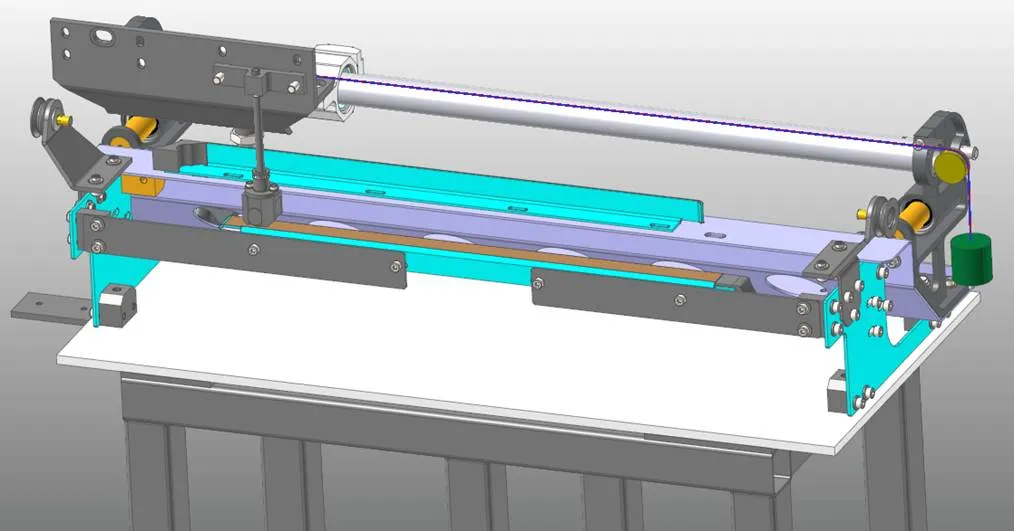
圖8 仿真模型6
6 結論
基于實驗與仿真相結合的測量方法,對門系統中主要接觸副的接觸剛度和接觸阻尼進行了實驗測量和仿真分析,實驗裝置和門系統的接觸形式相同,不需要數據推導,能夠對螺旋傳動等特殊類型的接觸進行測量,在獲取接觸參數的同時也能夠對接觸參數的實驗值進行仿真驗證,在門系統仿真模型中不再需要對接觸參數的值進行修正,為建立高精度的門系統仿真模型提供了基礎。
表7 接觸副參數設置

Tab.7 Contact pair parameters setting
[1] 曾世文. 城市軌道車輛塞拉門關門性能研究[D]. 南京理工大學, 2011.
[2] 洪軍, 蔣祥俊, 張進華, 等. 一種測量機械結合面法向及切向接觸剛度的綜合實驗臺: 中國, 201410131098 [P]. 2014-07-09.
[3] 郭鐵能, 郝宇, 蔡力鋼,等. 一種測試螺栓結合面接觸阻尼特性的方法: 中國, 201310309104 [P]. 2013-11-13.
[4] 石遠豪. 結合面接觸阻尼和接觸剛度的實驗檢測研究[D]. 廣東工業大學, 2016.
[5] 李小彭, 郭強, 李加勝,等. 結合面法向接觸剛度分形預估模型及其仿真研究[J]. 中國工程機械學報, 2016, 14(4): 281-287.
[6] 洪軍, 杜飛, 李寶童,等. 一種接觸剛度的高精度超聲檢測方法: 中國, 103616436B [P]. 2016-01-13.
[7] 孫星星. 超聲原子力顯微鏡的微觀力學性能仿真研究[D]. 安徽工程大學, 2015.
[8] 劉文威. 基于分形理論的機械結合部接觸特性參數研究[D]. 華中科技大學, 2016.
[9] 徐超, 李東武, 陳學前,等. 考慮法向載荷變化的微滑摩擦系統振動分析[J]. 振動與沖擊, 2017, 36(13): 122-127.
[10] 王玉柱, 劉婷婷. 基于雙目視覺的鋼軌磨耗測量技術研究[J]. 軟件, 2017, 38(3): 113-117.
[11] 徐國英, 王闖, 姚希民, 等. 基于RecurDyn軟件坦克懸掛系統動力學仿真[J]. 機械研究與應用, 2015, 28(3): 43-45.
[12] 郭彬,唐軍,黃武新,等. 基于RecurDyn的步進鏈傳動系統的機電聯合建模與仿真[J]. 機械傳動, 2015, 39(11): 110-114.
[13] 王亞東, 王祖進. 城軌塞拉門虛擬樣機建立方法研究[J]. 軟件, 2017, 38(12): 291-295.
[14] 王祖進, 史翔, 貢智兵, 等. 城軌塞拉門控制系統虛擬樣機建立方法研究[J]. 軟件, 2018, 39(2): 143-146.
Study on Experimental Method for Obtaining the Contact Parameters of the City Track Door
GONG Zhi-bing, WANG Zu-jin
(Nanjing Kangni Mechanical & Electrical Co. Ltd., Nanjing 210038, China)
During the dynamic simulation of the city track door, the contact parameters need to be constantly revised to improve the accuracy of the door system simulation. In order to make the door system simulation more accurate and accord with the actual working conditions, an experimental device was designed. The contact stiffness and contact damping of the main contact pairs in the door system were obtained through a combination of experimental and simulation methods. After obtaining the contact parameters, it is no longer necessary to perform multiple corrections on the values of the contact parameters in the simulation process of the same door system, which improves the precision of the door system simulation.
City track door; Virtual prototype; Experimental device; Contact parameters
TP391.9
A
10.3969/j.issn.1003-6970.2018.07.016
貢智兵(1980-),男,博士,工程師,主要研究方向:軌道車輛門系統;王祖進(1988-),男,博士,工程師,主要研究方向:軌道車輛門系統。
本文著錄格式:貢智兵,王祖進. 城軌門系統接觸參數實驗獲取方法研究[J]. 軟件,2018,39(7):79-83
猜你喜歡
作文·小學低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學低年級(2024年2期)2024-04-29 00:00:00
作文·小學低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
