河北石人溝鐵礦井下鏟運機無線遙控系統設計
2018-08-17 00:14:12王亞東田廣才麻洪月
現代礦業 2018年7期
關鍵詞:系統
王亞東 田廣才 劉 梅 麻洪月
(1.河北鋼鐵集團礦山設計有限公司;2.河北鋼鐵集團礦業有限公司石人溝鐵礦)
石人溝鐵礦井下鏟運機由作業人員駕駛進入礦房鏟裝作業,礦房內時常會發生頂板浮石冒落現象,極大威脅到作業人員的生命安全。該礦采用國產小型井下鏟運機進行生產作業,其控制方式基本為手動機械式操作,本研究通過對其進行改造設計,實現對鏟運機進行無線遙控,在保障駕駛員人身安全的同時,提高開采效率。
1 無線遙控系統總體設計
石人溝鐵礦井下鏟運機無線遙控系統主要由先導液控單元、車載控制器單元、車載操作單元、車輛狀態監測單元和遙控器單元組成(圖1)。車載控制器通過切換開關判定輸入的操作信號,當切換開關打到本地時,車載控制器僅接收和處理車載操作單元信號,當切換開關打到遙控時,車載控制器僅接收處理遙控器單元信號。遙控器或車載操作單元發出的各種作業指令通過車載控制器單元處理和判定后,將正確的操作指令傳達給先導液控單元和其他執行設備,最終實現對鏟運機進行控制(如發動機啟停、發動機油門控制、剎車、車輛轉向、鏟斗翻轉、大臂升降、變速箱換擋等)。車輛狀態監測單元實時監測車輛的運行狀態(如皮帶斷帶、缸蓋溫度、機油壓力與溫度、液壓油溫度、液壓油回油堵塞、剎車系統蓄能器壓力等)。當車輛狀態監測單元接收到報警信號后,發送給車載控制器單元,控制器根據報警信號類別發出緊急停車或剎車指令,確保車輛運行安全。無線收發器作為遙控器單元的組成部分,將接收的遙控器的各項操作指令發送給車載控制器,并將車載控制器發出的車輛狀態信息反饋給遙控器。
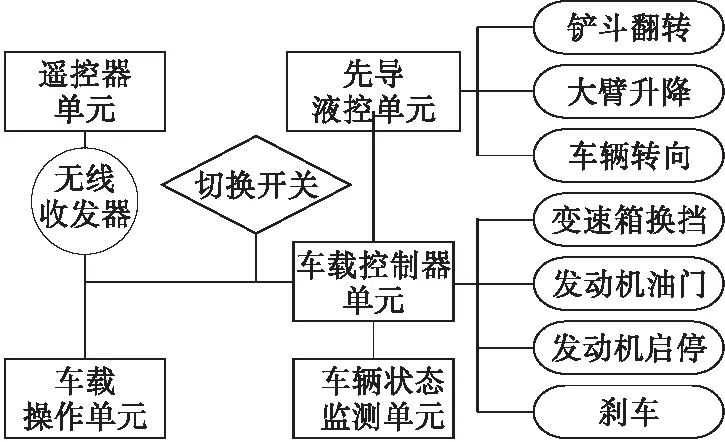
圖1 無線遙控系統架構
2 系統功能設計
2.1 先導液控單元
系統先導液控單元利用鏟運機剎車系統提供的高壓液壓油,經減壓溢流閥1將液壓油壓力調整至系統所需水平,而后供給電比例減壓溢流閥組3、4,電比例減壓溢流閥組3、4接收到控制器信號后進行動作,輸出所需壓力的先導液壓油,對轉向閥5和工作閥6的閥芯位置進行控制,最終實現鏟運機作業時動作控制,包括車輛轉向、鏟斗翻轉和大臂升降(圖2)[1-4]。同時在系統中增加蓄能器,確保整套系統運行穩定。
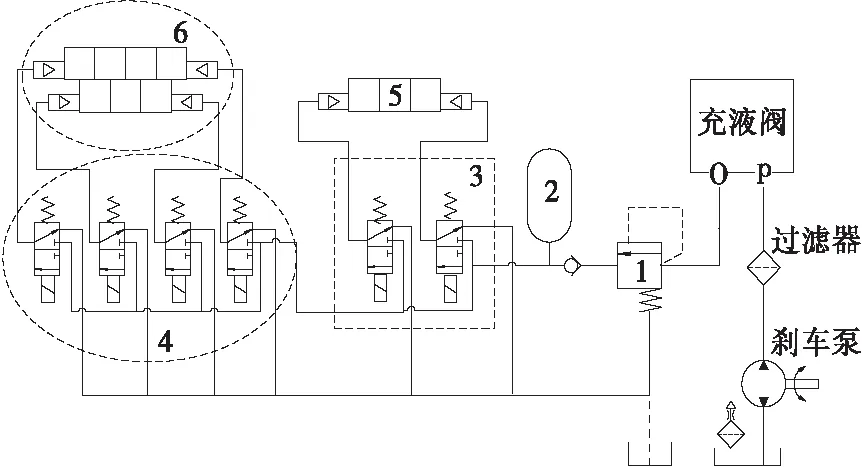
圖2 先導液控單元
2.2 車載控制器單元
系統車載控制器單元采用32位模塊化架構[5-7],支持 CANopen、SAEJ1939和自定義通訊協議[8-10],使用 CoDeSys軟件進行內嵌程序編譯可以實現各種復雜的邏輯控制(圖3)[11]。

圖3 車載控制器單元
2.3 車載操作單元
系統車載操作單元包括轉向控制手柄、工作控制手柄、換擋手柄、電磁閥換擋機構、電子油門踏板和電子油門執行器(圖4),其中轉向電磁閥組和工作電磁閥組即為圖2中電比例減壓溢流閥組3、4。轉向手柄和工作手柄輸出0~5 V模擬量信號至車載控制器,車載控制器接收信號后按比例輸出0~600 mA電流,控制對應的電比例減壓溢流閥開度,最終實現車輛轉向、鏟斗翻轉、大臂升降的動作和快慢。電子油門踏板根據駕駛員踩踏深淺的不同,輸出0~5 V模擬量信號至車載控制器,車載控制器通過H橋驅動電子油門執行器的伸縮長度,實現對發動機油門的控制。換擋手柄根據駕駛員的需要,向車載控制器輸出開關量信號,車載控制器根據信號的不同控制電磁閥換擋機構,實現對變速箱前進檔、空擋、倒檔和1、2、3檔的控制。

圖4 車載操作單元
2.4 車輛狀態監測單元
系統車輛狀態監測單元包括遠程I/O模塊、皮帶斷裂傳感器、機油壓力和溫度傳感器、缸蓋溫度傳感器、液壓油溫度傳感器、液壓油回油杜塞傳感器、剎車系統蓄能器壓力傳感器等(圖5)。
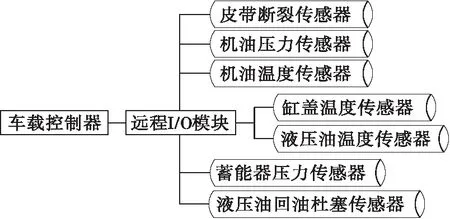
圖5 車輛狀態監測單元
2.5 遙控器單元
系統遙控器單元包括操作機構(操作手柄、按鈕、換擋開關、撥動開關),顯示報警機構(1個OLED顯示模塊及1個蜂鳴器),無線收發器(1個無線收發模塊模塊及其天線),電源(電池、DC-DC電源模塊、電壓模擬量輸出部分)以及核心控制器(1個核心控制板)(圖6)[12]。

圖6遙控器單元
3 結 語
對石人溝鐵礦井下鏟運機的無線遙控系統進行了設計,系統經過2個月的研發、測試、安裝和調試,現已在該礦露天料場進行了試驗,不但保障了鏟運機安全運行,而且提高了采場作業效率。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32