基于OpenFlow的控制器部署可靠性方案設計
2018-08-17 00:26:48張,,
計算機工程 2018年8期
張 , ,
(西安郵電大學 通信工程學院,西安 710121)
0 概述
第5代(5G)移動通信系統[1-2]具有很高的頻譜利用率和能效,傳輸速度和資源利用率比4G通信系統高了一個數量級,因為這些優點,5G正成為通信領域的研究熱點[3-4]。超密集異構網絡技術作為5G的核心技術之一,具有網絡規模大、網絡節點數量多的特點,對傳統網絡管理構成新的挑戰。傳統網絡管理依賴大量網絡設備(如交換機、路由器等)以及各種用來驅動設備的復雜協議,通信網絡故障率高、可擴展性差、網絡管理任務繁重。軟件定義網絡(Software Defined Networking,SDN)[5]作為一種新興技術,是未來最具前途的網絡架構之一[6-8]。SDN將復雜的網絡管理功能集中到控制器上,控制器為OpenFlow交換機計算出轉發數據分組的流表,OpenFlow交換機負責使用流表轉發數據。該方式能極大提高網絡資源利用率、簡化網絡管理流程、降低運營成本[9-10]。
SDN采取集中控制管理方式,如果控制器和OpenFlow交換機失連,將導致OpenFlow交換機丟棄所有與流表不匹配的數據包,這會對整個網絡造成嚴重后果,因此,控制器和OpenFlow交換機的穩定連接對提高控制網絡的可靠性十分重要[11]。
在提高SDN控制網絡可靠性方面,一類方法通過解決鏈路故障率以及合理部署控制器來提高控制網絡可靠性。文獻[12]將整個SDN網絡劃分為多個控制域,在每個控制域中放置一個控制器,控制器在其控制域中選擇合適控制路徑,從而完成控制網絡。文獻[13]提出K-Critical算法來分割網絡并選擇控制器位置,其目的是處理故障并平衡所選控制器間的負載。上述方法均依據最短路徑法控制準則來進行控制網絡的可靠性設計,在實際網絡中,鏈路間的故障率并不相同,最短路徑法控制準則容易選擇出高故障率鏈路,從而對網絡整體的可靠性產生負面影響。另一類方法通過數學線性規劃來確定控制器部署位置和控制路徑。文獻[14]通過控制路徑損耗的預期百分比來表示SDN控制網絡的可靠性,通過將控制器放置問題簡化為二進制整數規劃問題來最大限度地提高SDN控制網絡的可靠性。文獻[15]將可靠性問題通過二進制進行整數規劃,以最大化設備和控制器間不相交路徑的平均數量,同時提出啟發式算法定義控制器備份列表以處理控制器故障。然而,控制器放置問題是NP-hard問題,當網絡規模較大時,上述方法都會花費較多時間。
針對以上方法的不足,本文提出一種用于提高控制網絡可靠性的新方案,并在實際網絡中進行控制器部署仿真,以驗證該方案的可行性。
1 控制網絡可靠性分析
SDN控制網絡在設計中通常忽略鏈路故障率,或者假設所有鏈路故障率相同,其采用最短路徑法控制準則進行控制網絡設計。在真實網絡中,鏈路故障率并不能忽略,且每條鏈路的故障率各不相同,最短路徑法并不能準確分析網絡整體可靠性。如圖1所示,C1表示控制器,S表示OpenFlow交換機,網絡連線中實線部分表示網絡鏈路,虛線部分表示控制鏈路,鏈路上的數字表示鏈路故障率。從圖1中可以看出,控制器通過控制鏈路將流表下發到各OpenFlow交換機上,從而實現對所有OpenFlow交換機的通信控制。

圖1 鏈路故障率影響分析網絡拓撲
計算控制器C1到達S6的控制路徑時,在考慮鏈路故障率的情況下,最短路徑法以起點到終點的故障率總值最小為原則進行路徑控制,此時控制器C1到達S6有2種控制路徑:(C1,S2,S6)和(C1,S2,S5,S6)。這種情況下,最短路徑法并不能快速、準確地選擇出哪條路徑為最佳控制路徑。隨著網絡規模的增大和接入的OpenFlow交換機數目的增多,最短路徑法控制準則對網絡整體可靠性帶來的負面影響急劇上升。
采用圖2所示的2個網絡拓撲分析控制器部署位置對控制網絡可靠性的影響,其中,各部件的功能和圖1相同。設定與控制器C1直連的鏈路故障率為0(即圖2(a)中控制鏈路(C1,S1)故障率為0,圖2(b)中控制鏈路(C1,S4)故障率為0)。在圖2(a)中,將控制器C1布置在S1上,當(S1,S2)鏈路出現故障時,除S1外,其他OpenFlow交換機都將和控制器失聯。在圖2(b)中,將控制器C1布置在S4上,當(S3,S4)和(S4,S5)中任意一條控制鏈路出現故障時,最多導致3個OpenFlow交換機與控制器失聯。經過對比可以看出,相比位置S1,在位置S4上部署控制器更能提高控制網絡的可靠性。
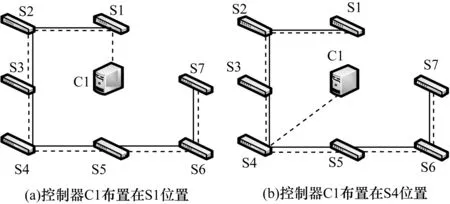
圖2 控制器位置影響分析網絡拓撲
綜上可知,合理選擇鏈路控制準則與控制器部署位置能有效提高SDN控制網絡的可靠性。
2 控制網絡方案設計
2.1 控制網絡數學建模
用無向圖N=(S,L)表示整體網絡拓撲,其中,S表示所有OpenFlow交換機,L表示所有OpenFlow交換機間的連接鏈路。假設在OpenFlow交換機及其控制器之間只有帶內連接,即控制器和OpenFlow交換機僅通過現有物理路徑進行通信。另外,用N′=(S′,L′)表示控制網絡,其中,S′表示受控制的OpenFlow交換機,L′表示網絡中的控制鏈路,顯然有S′=S,L′?L。
最短路徑法控制準則以鏈路長度(通常是節點跳數)作為路徑權值,各節點選擇出權值和最小的路徑來到達目的節點。前文已說明這種方式并不能保證所選擇路徑是一條最可靠的路徑。本文用鏈路可靠性指標Rab來衡量初始節點a到達目的節點b所經過鏈路的整體可靠程度,Rab定義如下:

在確定控制器在網絡中的部署位置過程中,本文用鏈路重要指標,即由某條鏈路故障而導致的與控制器失連的OpenFlow交換機數目,來衡量某條鏈路對網絡整體的重要性。鏈路重要指標值越大,則該鏈路關聯的OpenFlow交換機數目越多,該鏈路對網絡整體可靠性越重要。
初始狀態時所有鏈路的重要指標值設為0。將控制器部署在編號為1的位置上,依據控制準則得出編號為1時的控制路徑。在控制路徑的確定過程中,每選擇出一條控制路徑,將該路徑上所有鏈路的重要指標值加1,下一條控制路徑與上一條控制路徑有重疊鏈路時,對該重疊部分鏈路的重要指標值再加1。選擇出最后一條交換機的控制路徑后,該部署位置上的控制路徑重要指標值即被確定。
確定首個位置上控制路徑的重要指標值后,計算下一個位置所生成控制路徑及其相應鏈路的重要指標值,得出所有位置的控制路徑和重要指標值后,通過第2.2節的算法選擇出控制器的部署位置。
2.2 控制器位置部署算法
本文設定一個衡量控制網絡不可靠指數的參數如下:
其中,G(N′)表示控制網絡的不可靠指數,G(N′)數值越小,控制網絡可靠性越高,δab表示節點a與節點b間的鏈路誤差率,weightab表示節點a與節點b間的鏈路重要指標值,Pab表示節點a和節點b之間是否存在控制鏈路,若存在,則Pab=1,否則Pab=0。控制器位置部署算法流程如圖3所示。首先對網絡中所有的OpenFlow交換機進行從1到n的編號統計,同時獲取OpenFlow交換機之間的所有連接鏈路誤差率,然后計算出所有可以部署控制器的位置上的網絡不可靠指數G(N′),在此基礎上,選擇出不可靠指數G(N′)最小的位置來部署控制器。
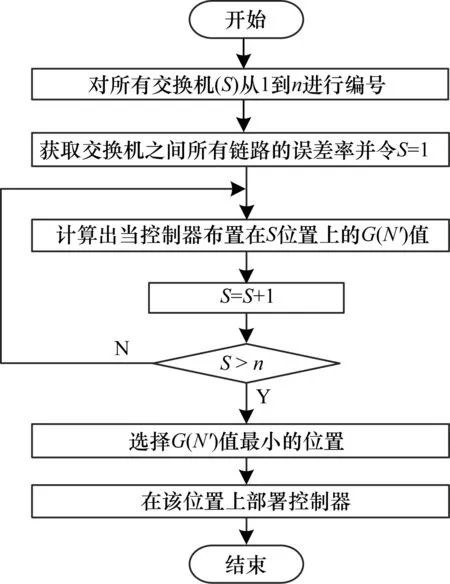
圖3 控制器位置部署算法流程
2.3 控制網絡模型實現
控制網絡部署模型如圖4所示,主要包括應用層、控制層和基礎架構層,應用層和控制層之間通過北向接口進行通信,控制層和基礎架構層之間通過OpenFlow協議進行通信。
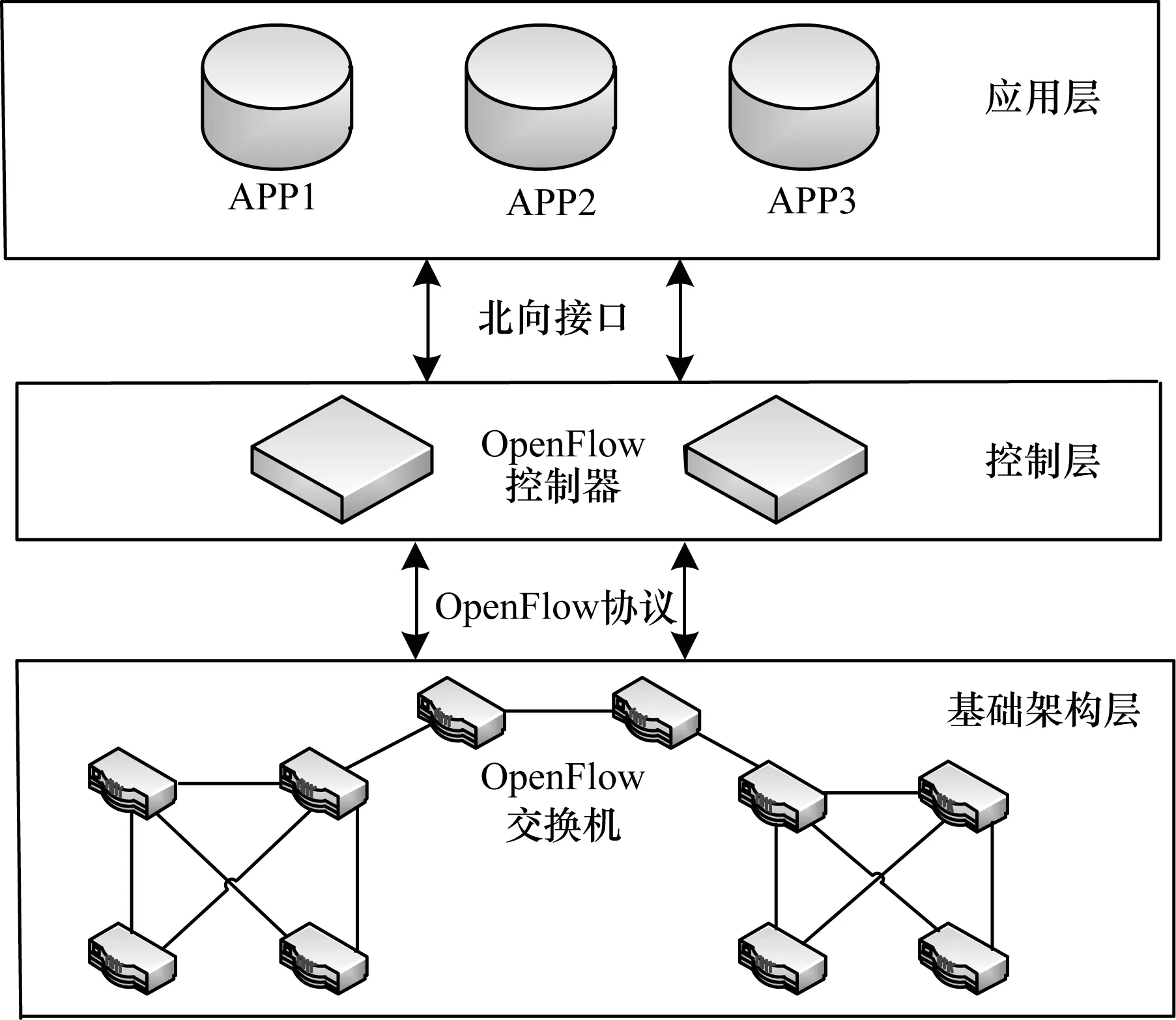
圖4 控制網絡模型架構
應用層的功能包括基本數據流轉發、拓撲發現、鏈路故障測量、控制路徑計算。基本數據流轉發使OpenFlow交換機查看每一個數據包、學習源-端口映射關系,并建立源MAC地址和端口之間的關聯。OpenFlow交換機學習到二層地址時,流表會建立精確匹配,不同的TCP連接將會導致不同的流表建立;拓撲發現使控制層掌握全局網絡拓撲結構信息,并對網絡拓撲信息進行統一管理;鏈路故障測量收集網絡中所有鏈路的丟包率,由丟包情況衡量該鏈路的故障率;控制路徑計算通過鏈路控制準則選擇出控制器到達各OpenFlow交換機的最可靠控制路徑。應用層無需考慮底層細節,其通過簡單編程來進行控制決策應用的快速部署。控制層為邏輯中心控制器,負責執行應用層的控制策略并生成流表下發到基礎架構層。基礎架構層為支持OpenFlow協議的交換機轉發組件,負責執行控制層下發的數據流表并進行網絡數據幀的具體轉發。
3 仿真結果與分析
在本文實驗中,電腦系統環境為Ubuntu 14.04.5 LTS,使用Mininet 2.2.1軟件搭建SDN仿真環境,選用POX控制器。采用圖5所示的經典網絡拓撲來比較本文控制準則與最短路徑法控制準則在網絡故障率和網絡延時2個方面的性能。
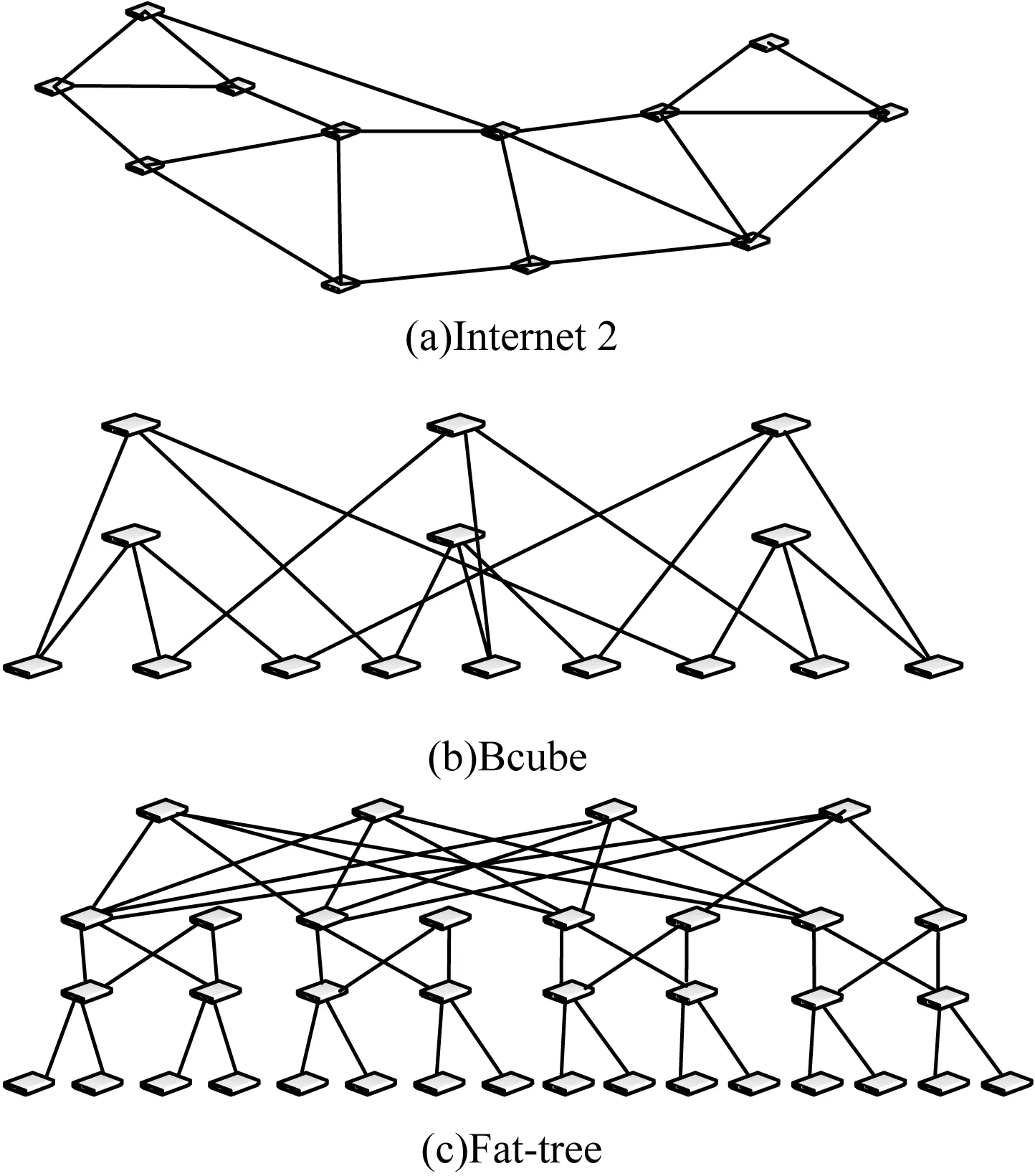
圖5 仿真網絡拓撲
首先,采用圖5中的Internet 2和Fat-tree來對比2個方案的控制網絡故障率。網絡故障率定義為控制器到達各目的節點的控制數據平均丟失率,網絡故障率仿真結果如圖6、圖7所示。
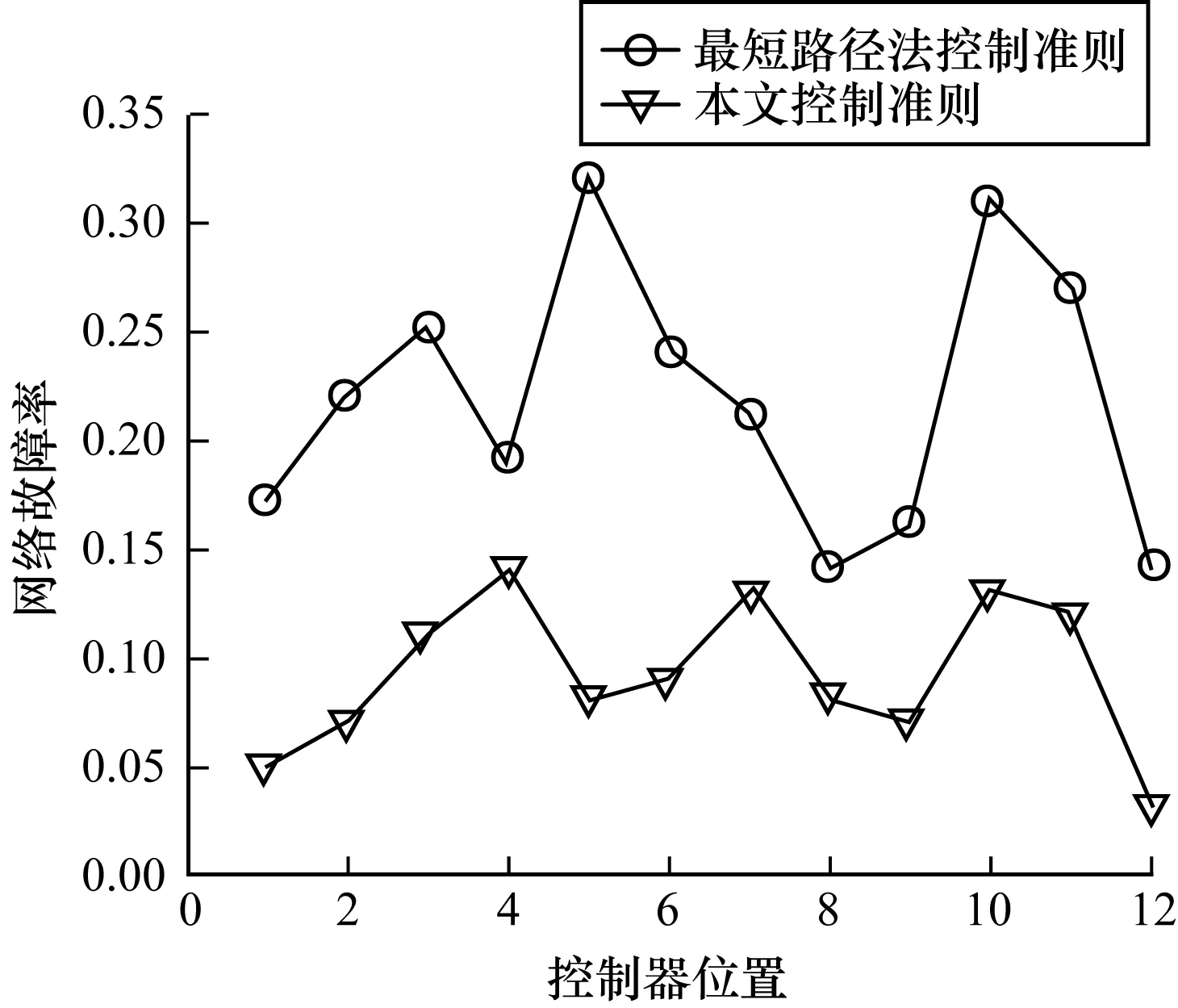
圖6 Internet 2網絡故障率仿真結果
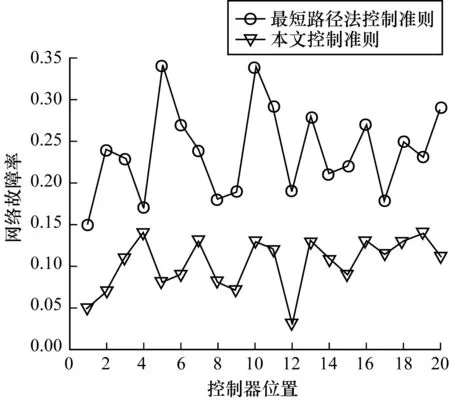
圖7 Fat-tree網絡故障率仿真結果
由圖6、圖7可以看出,本文控制準則在故障率控制方面的性能優于最短路徑法控制準則。接下來,對比2個方案的控制網絡時延性能。控制網絡時延定義為所有位置在各時間段平均時延情況,網絡時延仿真結果如圖8、圖9所示。
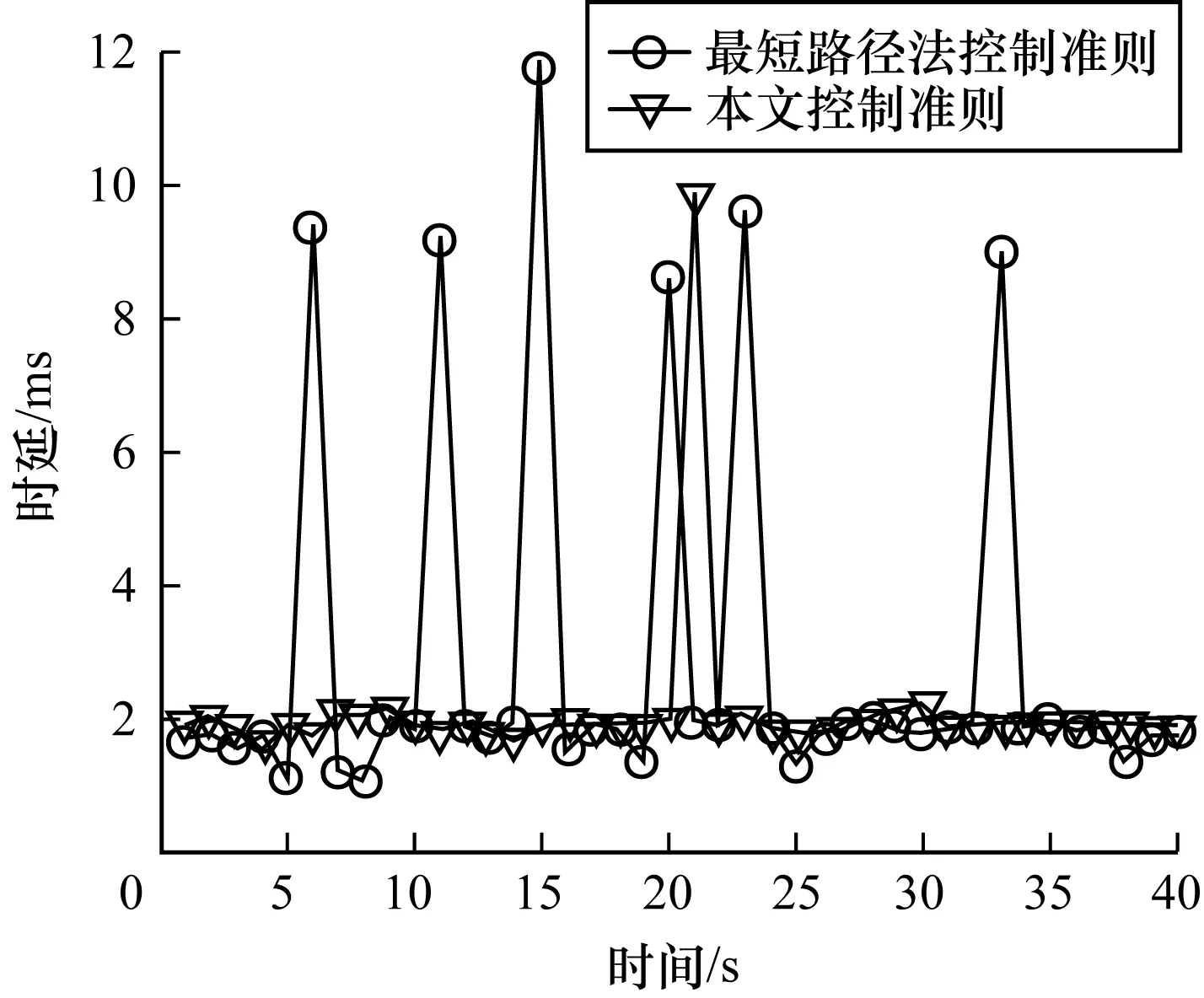
圖8 Internet 2網絡時延仿真結果
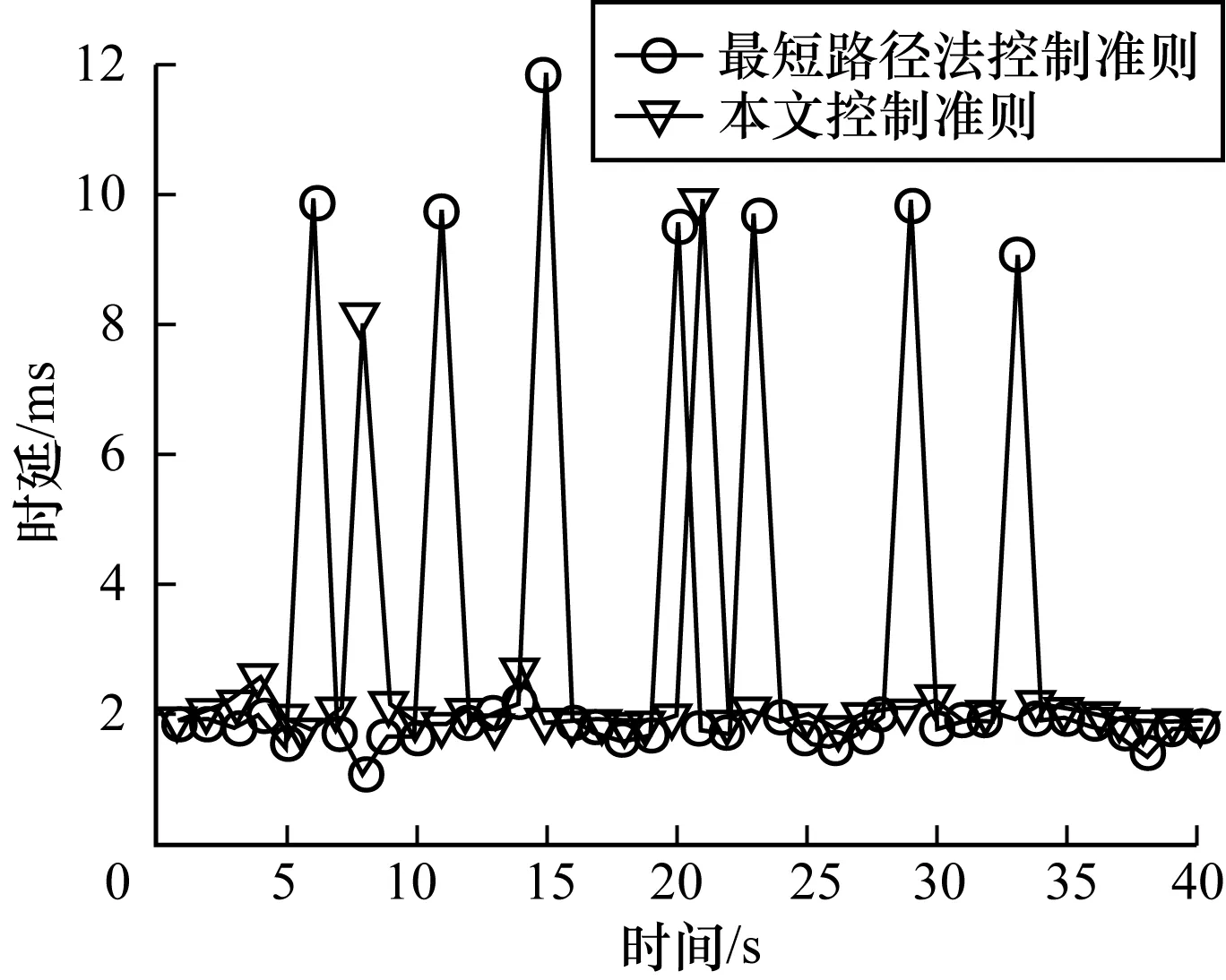
圖9 Fat-tree網絡時延仿真結果
由圖8、圖9可以看出,未出現鏈路故障時,最短路徑法控制準則網絡時延性能優于本文控制準則。在控制數據傳輸過程中出現鏈路故障會造成傳播時延的急劇惡化。本文控制準則鏈路故障率小于最短路徑法控制準則,在控制數據傳輸初期,最短路徑法控制準則平均時延優于本文控制準則,但后期隨著通信時間的增加,本文控制準則總平均時延優于最短路徑法控制準則。綜合對比網絡故障率和時延性能,可以看出本文控制準則更能改善網絡性能。
最后驗證本文所提控制器位置部署算法的性能,用式(3)衡量該算法對常用控制器部署算法在可靠性方面的改進程度。
(3)
其中,N(Random,SP)表示在最短路徑法控制準則條件下,在網絡隨機位置部署控制器時的控制網絡不可靠指數,N(Optimal,OP)表示在本文控制準則條件下,由新控制器部署算法計算出部署位置上的控制網絡不可靠指數。新控制器位置部署算法可靠性改進效果如圖10~圖12所示。
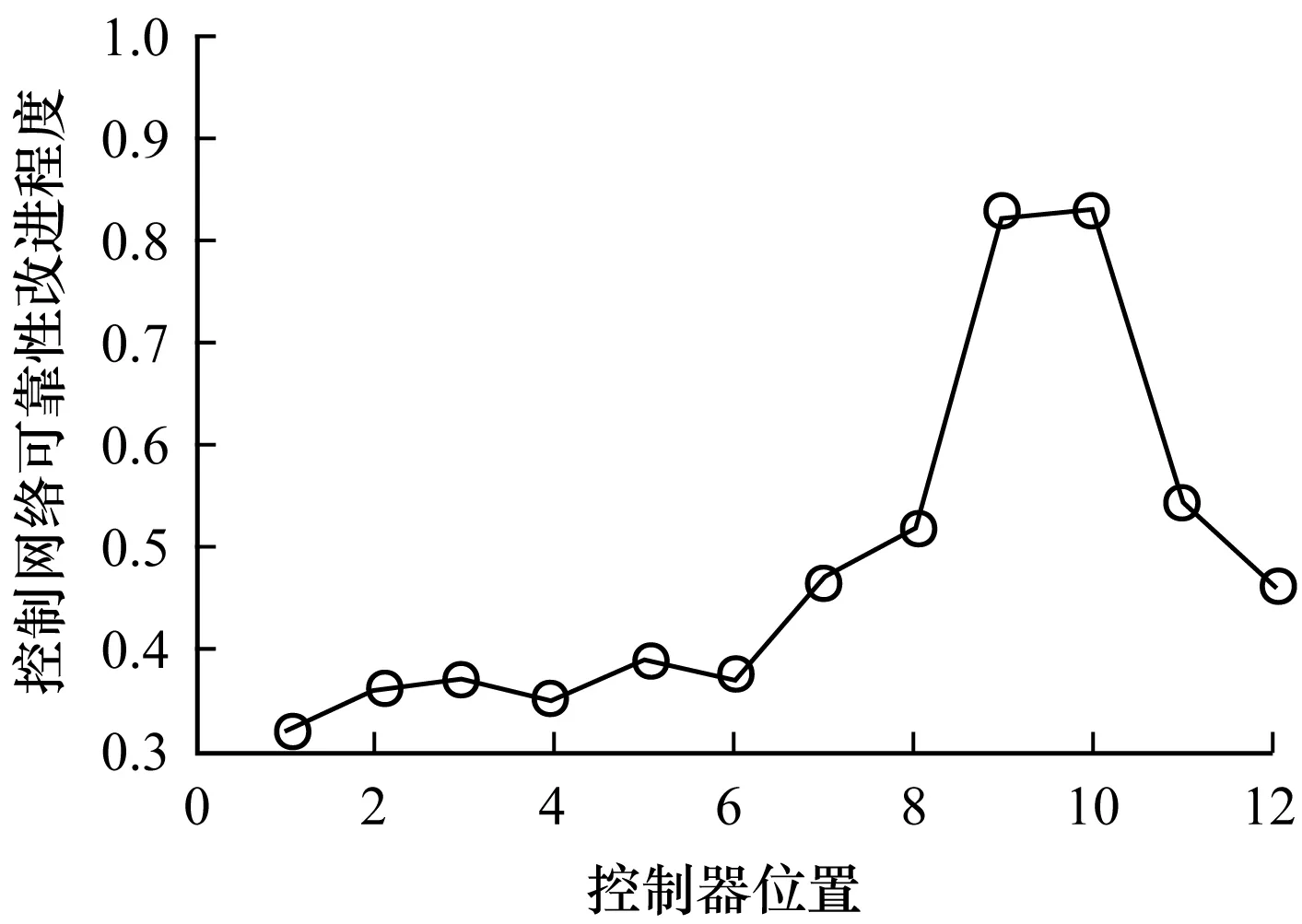
圖10 Internet 2拓撲控制器部署仿真結果
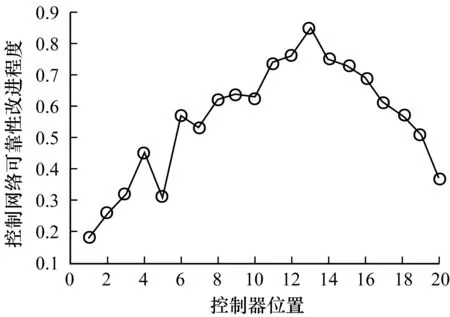
圖11 Fat-tree拓撲控制器部署仿真結果

圖12 Bcube拓撲控制器部署仿真結果
由圖10~圖12可以看出,在控制網絡可靠性方面,相對常用控制器部署算法,本文控制器部署算法取得了18%~85%的改進提高。因此,本文控制器部署算法更能改進控制網絡的可靠性。
4 結束語
針對最短路徑法控制準則不能提高控制網絡可靠性的問題,本文以鏈路可靠性指標為控制準則,提出一種新方案,通過該方案來選擇合理的控制器部署位置和可靠的控制路徑。仿真結果表明,在故障率和時延方面,本文方案對常用控制網絡有明顯的改進,最大改進達85%。但在網絡鏈路故障率極低的情況下,本文方案對控制網絡可靠性的改進不大,且傳輸時延性能會降低。如何在保證較低故障率的同時縮短網絡的傳播時延,將是下一步的研究內容。