基于MPC的可變相序交通信號優化控制方法
2018-08-21 01:59:44楊利紅王列偉
計算機技術與發展 2018年8期
楊利紅,王列偉
(中國電子科技集團公司第三十八研究所 合肥公共安全技術研究院,安徽 合肥 230000)
0 引 言
由路段、交叉口、部署在交叉口的交通信號燈,以及車輛和人的動態行為組成的城市道路交通網絡系統可以被看成一類含有大量不確定性的復雜的離散事件系統。而城市道路交叉口信號系統的設計與優化是提高城市道路利用率、減少擁堵的關鍵。文中研究了基于Petri網的道路交叉口信號控制系統的建模及優化方法。
Petri網是一種常見的離散事件系統模型[1]。Petri網模型對動態系統中常見的并行(parallelism)、同步(synchronization)、資源共享(resource sharing)等特性具備強大表述能力,廣泛應用于工業制造系統、軟件系統設計、工作流、并行計算、交通系統等領域。近年來,使用Petri網對道路交叉口系統進行建模的方法受到學者的廣泛關注,具有代表性的成果見文獻[2-8]。其中文獻[2-5]建立基于Petri網的微觀交通模型,通過時延Petri網、隨機Petri網、著色Petri網等結構,描述交叉口信號燈色的切換、車輛在道路上的移動速度以及車輛在交叉口內可能的轉向和路徑選擇等信息。系統仿真證明,通過這類模型可以較準確地計算出車輛排隊長度以及車輛在交叉口的平均等待時間。文獻[6-8]不以單個車輛作為建模對象,而是類似于連續時間系統(continuous-time system),主要以交通流量、車輛速度,以及車輛密度等作為描述對象,建立基于混合網結構的宏觀交通模型。然而,上述這些交叉口建模及優化算法都是基于傳統的交通信號固定相序邏輯,沒有充分考慮車流到達的隨機性、突發性等不規律的動態特征,優化空間有限。在文獻[9-10]中,作者雖然考慮了基于可變相序的優化算法,但是優化函數大都是根據當前或者歷史數據構造(例如通過當前的車輛排隊長度、車輛停留時間、車輛通過時間等),而沒有考慮系統狀態的預測,對車流實時狀態的適應性有待提高。
文中首先建立了基于混合Petri網的可變相序交通信號模型,并創新性地提出了一種基于MPC(model predictive control,模型預測控制)[11-12]的優化控制算法。根據MPC控制模型,該算法在每一個采樣瞬間通過求解一個有限時域開環最優控制問題,獲得在一個完整交通信號周期內的最優相序及綠燈通行時間,之后放行該最優解中的第一個相位,等到該放行相位結束后,再更新系統狀態,并將當前狀態作為最優控制問題的初始狀態,求解下一個最優相序。
1 交通信號可變相序的Petri網模型
Petri網有多種定義形式,其中應用比較廣泛的是庫所/變遷(place/transition)網。經典離散Petri網的形式化定義如下:
定義:一個Petri網系統是一個二元組
假設pi,i=1,2,…,|P|和tj,j=1,2,…,|T|分別表示庫所和變遷,在Petri網模型圖中通常用圓圈和矩形框表示。在關聯矩陣中,如果Pre[i,j]>0,則在網系統中有一條從pi指向tj的弧,弧上的權重為Pre[i,j];在關聯矩陣Post中,如果Post[i,j]>0,則在網系統中有一條從tj指向pi的弧,弧上的權重為Post[i,j]。如果模型中的一條弧上不標明數字,則默認該條弧上的權重為1。Petri網的標識狀態(又稱為marking)由分布在各個庫所中的托肯(token)表示。系統的全局標識狀態向量用M表示,非負整數M[pi]表示庫所pi中包含的托肯個數,也稱為庫所的標識。在系統狀態M下,一個變遷被稱為使能(enabled),當且僅當該變遷的輸入庫所中都包含有足夠多的托肯,并使得式1成立。
?pi∈*tj,M[pi]≥Pre[i,j]
(1)
其中,*tj表示變遷tj的所有輸入庫所的集合。
當一個變遷使能時,該變遷具備觸發(fire)條件,即系統中有足夠的資源在其輸入庫所中。一個變遷觸發后會將其輸入庫所中的資源(托肯)轉移到其輸出庫所中。當一個或者多個變遷觸發后,系統進入新的狀態M',并滿足基本狀態等式2。
M'=M0+(Post-Pre)·σ,M'∈N|P|,σ∈N|T|
(2)
其中,σ為觸發向量,σ[j]為系統從初始狀態M0進入狀態M'的過程中,變遷tj觸發的次數。
道路交通系統模型可以大致劃分為車流模型、交叉口模型,以及信號燈及其控制模型等部分。文中重點考慮交叉口及信號燈控制模型,對于非交叉口內的部分,只考慮進出交叉口的禁止車輛隨意變道區域的車流模型。如圖1(a)所示的交叉口模型,4個方向均為雙向六車道,且每個方向進入交叉口車流分為直行、左轉和右轉。
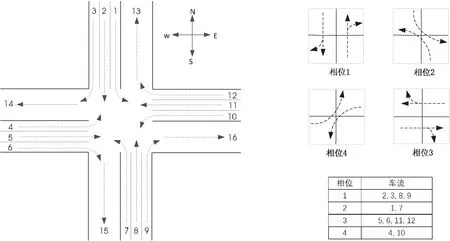
(a)交叉口車流示意圖 (b)4相位信號控制方案
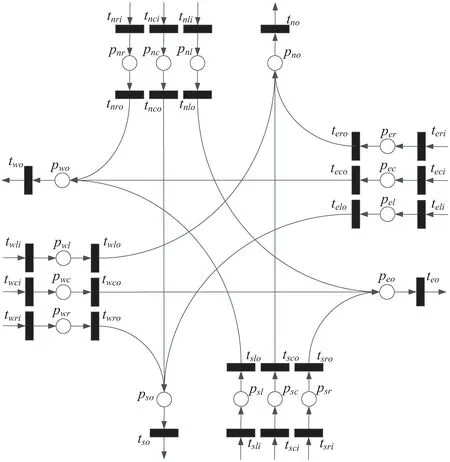
(c)交叉口車流的Petri網概括模型
根據車流模型的定義并假設交通信號系統采用固定相序,文中使用比較通用的4相位信號控制方案,如圖1(b)所示。相位1和2分別為允許南北方向的直行加右轉和左轉車流通行;相位3和4分別為允許東西方向的直行加右轉和左轉方向車流通行。
圖1(c)為該交叉口的Petri網概括模型(利用庫所和變遷的局部特性(locality),可通過逐步細化得到滿足仿真要求的加細模型[13])。模型中的庫所用于對交叉口內的或者準備進入交叉的車流建模,而變遷用于對車流駛入或者駛出對應車流隊列的事件建模。為了便于說明,對模型中的所有節點采用了統一的命名方式。對于變遷,其命名規則為tx(y)z,其中x=n,s,w,e分別表示北、南、西、東四個方向,y=l,c,r分別表示左轉、直行和右轉,z=i,o分別表示駛入和駛出。例如,變遷twli的含義為從交叉口的西面駛入左轉車道,變遷two的含義為從交叉口的西面駛出交叉口。對于庫所,采用了類似的命名規則px(y)(z),例如庫所pwc表示從交叉口西面進入直行車道的車流隊列,庫所peo表示從交叉口東面駛出的車流隊列。庫所在狀態M下的托肯數M[px(y)(z)]代表了對應車流隊列中車輛的個數。以從交叉口西面進入左轉車道,并由從交叉口北面駛出交叉口為例。車輛到達左轉車道時變遷twli被觸發,相應車流隊列的排隊數加1,即M[pwl]加1;隨后變遷twlo被觸發,車輛駛出左轉車道,進入交口北面駛出車流隊列(由庫所pno表示);最終變遷tno被觸發,車輛駛出交叉口。
根據交通信號控制系統的特性,采用基于有限語義服務器語義(finite server semantics)的固定時延(constant delay)離散時間Petri網進行建模。對于車流部分,采用基于無限服務器語義(infinite server semantics)的隨機時間Petri網建模,也就是說,每個變遷的觸發延遲時間為符合指數分布的隨機數[10]。基于無限服務器語義的離散時間Petri網,又稱為馬爾可夫Petri網(Markovian Petri net)。對于在一個指定標識M下的變遷tj,其觸發時間符合參數為λj·enab(tj)的指數分布,其中λj為變遷的觸發速率,enab(λj)為變遷的使能度。

(3)
馬爾可夫Petri網及其在交叉建模中的應用具體可參見文獻[8]。基于無線服務器語義的連續時間Petri網得到了廣泛的應用[14-16]。在任意時間點τ,變遷tj的輸出流(flow)被f(tj,τ)定義為:
f(tj,τ)=λj·enab(tj,τ)=
(4)
可以看出,在連續Petri網中,變遷的使能度不再限制為整數。
道路交叉口模型中的另一個重要部分是信號控制模型。為方便討論,文中將綠燈和黃燈歸為一類允許通行信號,因此信號周期由各個相序的通行時間之和組成。傳統的固定相序信號控制方法中,各個相位的車流根據預先設定好的固定順序依次獲得通行權。該方法雖然簡單,但是卻沒有充分考慮各個方向到達車流量的動態特征,無法對車流的變化做出及時有效的響應,優化空間較小。因此,文中提出了一種基于Petri網的可變相序控制模型,系統根據優化目標函數,動態選擇相序及每個相位的綠燈通行時間。圖1(b)中4相位交通信號系統的可變相序控制模型如圖2所示。
模型中庫所p1,p2,p3,p4用于對相位1到相位4的通行綠燈狀態建模,當庫所中含有托肯時,表示其對應相位中的車流具有通行權。例如,如果庫所p1中含有托肯,則相位1中的車流2、3、8、9具備了通行權(見圖1)。庫所pe1,pe2,pe3,pe4用于確保在一個完整的信號周期內,任何一個相位都只能獲得一次通行權,從而避免某個相位的車流長時間處于等待狀態;在狀態M下,如果M[pei]=1,表示在當前的信號周期內,相位i尚未獲得過綠燈通行權,其中i=1,2,3,4;只有當庫所p0和pei同時含有托肯時(M[pei]=M[p0]=1),相位i才有機會獲得綠燈通行權。庫所ps的作用是標識一個新的信號周期的開始。在文中的4相位交通信號控制模型中,M[ps]=4表示所有的相位都獲得了一次通行權,信號控制系統將進入下一個信號周期。
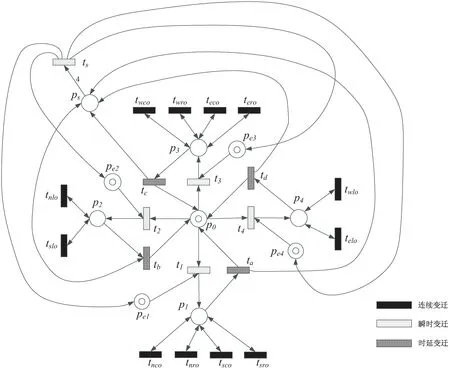
圖2 交叉口4相位可變相序交通信號控制模型
變遷t1、t2、t3、t4為瞬時變遷(immediate transition),也就是假設其變遷觸發時間為零。當瞬時變遷被使能時,立即完成觸發并更新系統狀態。變遷ta、tb、tc、td為固定時延變遷(determined delay transition),每個變遷具有一個延遲時間,分別表示為δa、δb、δc、δd。當一個固定時延變遷在時間點τ被使能,則經過其對應的時延δi,在時間點τ+δi變遷ti完成觸發并更新系統狀態。
在初始狀態下,M[pe1]=M[pe2]=M[pe3]=M[pe4]=M[p0]=1,因此變遷t1、t2、t3、t4都被使能,這在Petri網模型中形成了一個典型的沖突關系;在對應的交通信號模型中,這意味著所有的相位都有機會在下一時刻獲得綠燈通行權。因此,Petri網模型中的沖突解決策略決定了信號系統的相序選擇。例如,假設此時的沖突解決策略是變遷t1、t2、t3、t4的優先級依次降低。在初始狀態,變遷t1將優先獲得觸發,庫所p0和pe1中的托肯被轉移到p1中,因此相位1對應的車流獲得綠燈通行權,此時ta被使能;經過時延δa(相位1的綠燈通行時間)后,變遷ta觸發,庫所p1中的托肯重新轉移到p0中,同時庫所ps也獲得一個托肯;注意,此時庫所pe1中的托肯被清空,因此變遷t1不再使能,即在該周期內相位1不再獲得通行權;根據優先級,下一時刻變遷t2觸發(相位2的車流獲得通行權);當變遷t1、t2、t3、t4全部獲得觸發后,庫所pe1,pe2,pe3,pe4中的托肯全部被清空,而ps獲得4個托肯,因此變遷ts被使能,ts觸發后系統信號控制系統回到初始狀態,意味著一個新的信號周期開始。
2 基于MPC的可變相序優化算法
預測模型的建立和滾動優化過程是MPC控制算法的核心。文中創新性地將MPC算法框架應用到交通信號可變相序的優化問題中。
在任一個信號周期的起始時刻,以信號周期的總時長作為MPC模型的優化時間域,通過建立優化函數,求解在該信號周期內的最優相序策略;在獲得當前時間點的相序及綠燈通行時間后,應用當前第一個相位的通行策略,直到該相位綠燈時長結束;之后在下一相位通行開始前,再滾動式地優化有限時域內的控制策略,獲取下一個最優相位及其綠燈通行時間。需要注意的一點是,雖然與傳統MPC算法類似,為了使得模型能夠盡量細致地描述系統在整個時間域內的動態特征,從而取得較好的優化效果,在優化模型中采用了較小的步長(1s)。但是由于每個相位的通行時間必須是連續的,因此在計算出當前采樣時刻的最優控制策略后,采取的控制動作不以優化步長為單位,而以單個相位的通行綠燈時長為單位。
根據圖1、圖2中的交通流及信號控制模型,求解最優相序的問題可以轉換為求解變遷t1、t2、t3、t4的最優沖突解決策略問題。定義對角線矩陣W為沖突解決矩陣,其對角線元素的定義如下:
(5)
其中,Λ={t1,t2,t3,t4}。
相序優化考慮的優化指標可以有很多種,比較常用的包括排隊長度、車流通過率、車流停留時間等。在該算法中,假設當前的采樣時刻為τ,在一個完整信號周期T中,交叉口內各方向車流平均排隊長度構造相序優化的目標函數J為:
(6)
其中,pi∈ψ={pno,pwo,peo,pso};Mτ+δ[pi]表示在時刻τ+δ庫所pi對應隊列的排隊長度。
本文標題,取意于宋代無名氏的《一剪梅·漠漠春陰酒半酣》最后一句:“篝燈強把錦書看。人在江南,心在江南”。此時的作者,在“江南”耶、不在耶?——所謂“錦書”指夫妻間書信,傳情遞意,且要“篝燈強看”,那般地眷戀、向往、思念,是全詞情意落位的重心點。
在每一個采樣周期,通過解決優化問題(見式7),求解在信號周期內的T個最優的沖突解決矩陣Wτ,Wτ+1,…,Wτ+T:
(7)

3 算法仿真及比較結果
針對圖1中的4相位道路交通交叉口信號控制系統,本節基于混合結構的Petri模型(交通流使用了連續時間Petri網,其他采用離散時間Petri網),分別使用固定相序模型以及圖2所示的可變相序模型進行定量的仿真及比較分析。
對于車流模型,假設變遷ti對應的車流到達和離開時間的間隔都符合參數為θi=1/λi的指數分布,在連續模型中采用無限服務語義模型,則變遷的觸發速率為λi。假設在交叉口外,每個車流方向不允許變道區域的最大排隊長度限制為20;駛出交叉口的車流最大排隊長度限制為30(通過在模型中加入自環庫所實現,可參考文獻[12,16])。
文中定量地比較了交叉口內各個車流隊列的平均排隊長度L,也就是模型中庫所pno,pwo,pso,peo的平均托肯數量。實驗中采用基于Matlab的Petri網仿真工具,經過100次仿真后取平均值。L定義如下:
(8)
其中,K=100為仿真次數;ψ={pno,pwo,peo,pso}。
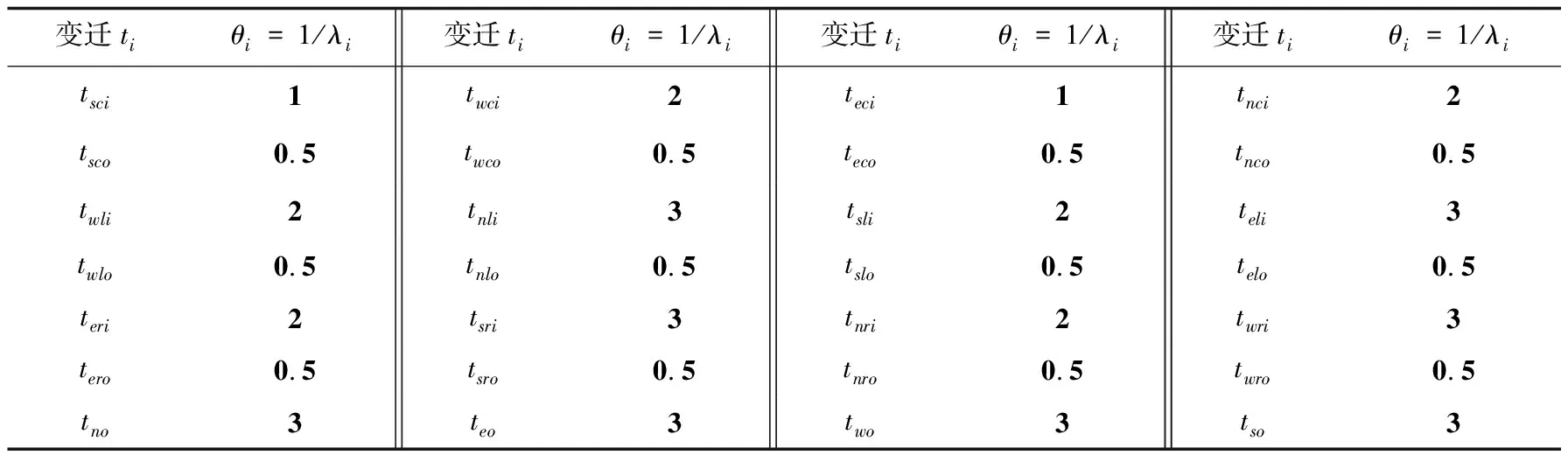
表1 車流Petri網模型參數配置
采用傳統的固定相序信號控制策略,以及文中提出的可變相序模型和優化算法(兩種方案采用的總信號周期相同),分別在Matlab下進行仿真,得到的仿真結果如表2所示。
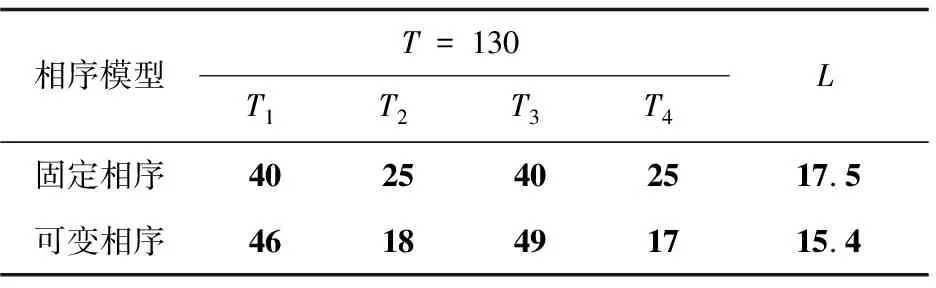
表2 仿真結果比較
從仿真結果中可以看出,使用可變相序模型以及基于MPC的相序優化算法,交叉口的平均排隊長度優化了12%(從17.5降到15.4)。
4 結束語
道路交叉口交通信號的優化能夠進一步提高車輛的通行效率以及道路資源的利用率,因此一直是交通系統控制與優化的熱點問題,在智能交通迅速發展的今天尤其受到重視。針對傳統固定相序交通信號控制機制的不足,提出了基于Petri網的可變相序控制模型,并結合MPC算法框架實現了相序與通行時間的優化。仿真結果表明,與傳統固定相序算法相比,該算法能有效減少交叉口內各方向的平均排隊長度,從而減少了擁堵。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年11期)2018-08-04 03:25:42