基于改進主從法的并聯(lián)雙向直流電源系統(tǒng)控制
2018-08-24 07:49:58,
計算機測量與控制 2018年8期
關(guān)鍵詞:實驗
,
(浙江理工大學 信息學院,杭州 310018)
0 引言
在可靠性要求高的電源供電系統(tǒng)中,通常采用電源并聯(lián)向負載供電。與傳統(tǒng)的集中式電源相比,它可通過改變并聯(lián)電源的數(shù)量來滿足不同輸出功率的需求。而且并聯(lián)電源具有承受應力小,冗余性高,響應速度快等優(yōu)點。
目前,在并聯(lián)均流電源系統(tǒng)中,主要常見的均流策略為:輸出阻抗法、主從控制法、平均電流法[1]、外加均流控制器法、最大均流均流法[2]、自主均流法[3]。主從控制法對于參數(shù)相近的電源模塊,只要滿足輸出電壓相等,就能實現(xiàn)均流效果,其均流機理是適時調(diào)整各模塊的輸出特性,使其上下平移一致,控制方法簡單,但其主要缺點是如果主模塊發(fā)生故障,系統(tǒng)就無法工作。尤其是系統(tǒng)上電啟動瞬間,電流誤差處于最大時容易發(fā)生故障。針對其缺點,本文提出了一種基于主從控制的數(shù)字均流[4]改進算法,減小系統(tǒng)啟動時某一模塊負載電流最大值,極大程度降低主從控制法均流故障概率,延長了電源模塊的使用壽命,提高了電源系統(tǒng)的穩(wěn)定性。
1 系統(tǒng)結(jié)構(gòu)及原理
如圖1所示,雙向DC-DC電源并聯(lián)模塊[5-6]、數(shù)字信號控制器(DSC)、驅(qū)動電路、電壓電流檢測電路、按鍵電路和OLED顯示屏等器件構(gòu)成了均流硬件電路。系統(tǒng)工作時,DSC首先產(chǎn)生兩路互補對稱占空比可變的PWM,經(jīng)過驅(qū)動電路將PWM幅值放大使并聯(lián)模塊輸出初始電壓電流,初始狀態(tài)電流不匹配度[7]較大。經(jīng)過電壓電流檢測電路反饋到DSC,DSC采用主從控制[8-11]數(shù)字均流控制算法實時處理反饋信號,改變PWM占空比,從而改變輸出電壓電流。一旦出現(xiàn)過流短路現(xiàn)象,過流保護電路關(guān)斷驅(qū)動信號,過流后可自動恢復。按鍵模塊改變并流模塊輸出電流比例。OLED模塊實時顯示并聯(lián)模塊輸出電壓電流及均流比例。
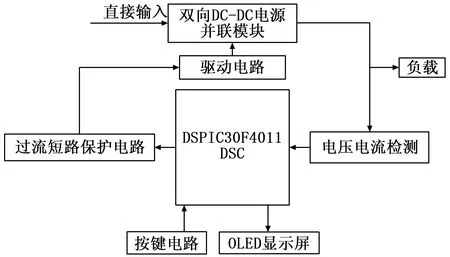
圖1 并聯(lián)均流電路系統(tǒng)框圖
2 系統(tǒng)硬件設(shè)計
2.1 并聯(lián)模塊設(shè)計
并聯(lián)模塊電源拓撲采用Buck/Boost型雙向DC-DC變換器,電路如圖2所示。

圖2 雙向DC-DC主電路結(jié)構(gòu)
Buck/Boost型雙向DC-DC變換器具有電感電流斷續(xù)和連續(xù)模式下變壓比保持不變的特性,有利于動態(tài)調(diào)節(jié)。
在工程實踐中,一般來說輸入電壓由220 V轉(zhuǎn)24 V的變壓器進行整流濾波提供,電壓范圍在24~33.9 V波動。降壓后輸出給各類高功耗的設(shè)備供電,故本文設(shè)計的電路參數(shù):輸入電壓為Ui=30 V,經(jīng)過雙向DC-DC電路斬波,輸出電壓Uo=8 V,負載電流I=1 A~5 A,額定容量是Pout=40 W,PWM頻率fs=10 kHz。因為主從控制產(chǎn)生故障的狀態(tài)一般發(fā)生在負載電流較大的情況,所以需設(shè)定較高的負載電流值為5 A,測量電路處于最大負載電流工作狀態(tài)時電路的穩(wěn)定性和并聯(lián)均流精度。
電源拓撲器件參數(shù)設(shè)計過程如下,由歐姆定律R=Uo/I計算得,負載范圍R=8~1.6 Ω。根據(jù)電感電流處于連續(xù)模式及以上指標,選擇合適的電容,電感。變壓比M與占空比D的關(guān)系在電流連續(xù)模式下如公式(1)所示:
(1)
計算出占空比D=4/15。當輸出電流處于最小值時,電感電流會出現(xiàn)斷續(xù)模式,考慮臨界負載電流情況,即I=Imin=1 A,主從模塊均分電流Imin/2需滿足公式(2):
(2)
公式(2)中,Iob為臨界負載電流,L為電感值。按D=4/15確定實際運行的臨界負載電流:
(3)
計算得到L=586.7 μH,實際電路需留有裕量,選取L=1 mH。給定輸出電壓紋波指標ΔV=±0.2 V,計算輸出電容C,根據(jù)紋波計算公式:
(4)
得出C=73.4 nF,為了盡量降低輸出紋波,選取C=470 μF[12]。
主電路中的開關(guān)管T1,T2選用IRF1010E,最大承受電壓UDS=60 V,導通電阻RDS= 12 mΩ。D2,D1選用開關(guān)管的內(nèi)部體二極管,其最大可通過電流50 A,反向恢復時間73 ns,滿足其最大輸出電流和最大輸入電壓要求。
2.2 電壓電流檢測模塊設(shè)計
檢測電路結(jié)構(gòu)如圖3和4所示,電流檢測采用電流檢測芯片INA282,固定增益G1為50,具有高共模抑制和極低的增益誤差,反饋精度高。反饋電壓VIF和檢測電流I的關(guān)系如公式(5)所示:
VIF=I×R4×G1
(5)
R4為串聯(lián)在電路中采樣電阻。該電路在電流反向流入時,反饋電壓VIF為零電壓,確保了電路輸出電流正向流出。
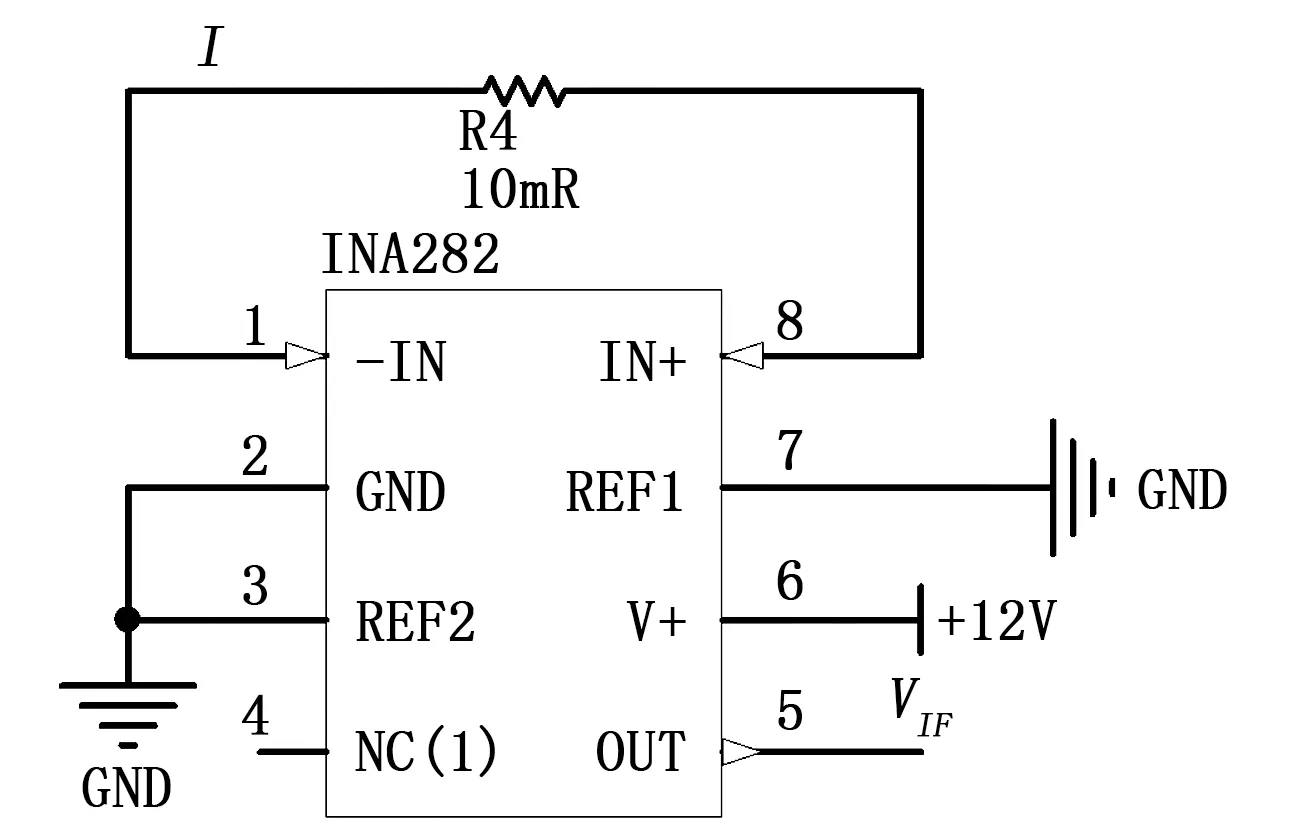
圖3 均流電流檢測電路圖
電壓檢測采用高精度增益差分運放INA143和儀表放大器INA128級聯(lián),增益G2、G3分別為0.1和1+50 kΩ/RG,其中RG為增益可調(diào)電阻,電壓反饋輸出電壓VF1與輸出電壓關(guān)系如下所示:
VF1=Uo×G2×G3=Uo×0.1×(1+50 kΩ/RG)
(6)
本設(shè)計有效地避免了輸出電壓檢測和單片機共地的問題,為輸出電壓反饋精度提供了保證,電壓檢測電路如圖4所示。

圖4 電壓檢測電路圖
3 系統(tǒng)軟件設(shè)計
3.1 軟件整體設(shè)計
軟件編程選擇Microchip公司的MPLAB XIDE集成開發(fā)環(huán)境和C編程語言。該軟件可在線調(diào)試代碼,為開發(fā)此系統(tǒng)提供了便利。
如圖5所示,在該系統(tǒng)中軟件執(zhí)行過程為:初始化OLED屏顯示、開啟兩路互補對稱的PWM模塊、配置ADC和TIMER0、1中斷和初始化按鍵IO口后,先判斷電路是否處于過流狀態(tài),若處于過流狀態(tài),則進入過流短路子程序,關(guān)斷PWM模塊和斷開主電路電源。在主函數(shù)中開啟軟啟動功能,最后在主循環(huán)while中實時顯示主從模塊輸出電壓電流及均流比例。在ADC中斷中采集主從模塊負載電流和輸出電壓反饋信號,在Timer0、1中斷中,分別實現(xiàn)系統(tǒng)數(shù)字均流算法和電路軟啟動功能。

圖5 DSC系統(tǒng)軟件整體配置流程圖
3.2 均流算法實現(xiàn)
DSC均流算法如圖6所示,配置控制主電源模塊的PWM為調(diào)節(jié)輸出穩(wěn)壓功能,從模塊的PWM為跟隨主模塊電流的均流功能。初始設(shè)置主模塊占空比略大于從模塊,主從電流從初始狀態(tài)電流不對稱開始調(diào)節(jié),若輸出電壓與參考電壓Vref偏差大于最小穩(wěn)壓精度,則改變主模塊的PWM占空比調(diào)節(jié)穩(wěn)壓。與此同時,從模塊負載電流與主模塊負載電流比較,若從模塊電流I2與主模塊電流I1偏差大于最小均流精度,則改變從模塊的PWM占空比實現(xiàn)均流。在調(diào)節(jié)過程中,均流的穩(wěn)定性和精度主要取決于主從模塊的調(diào)節(jié)速率和各模塊的PID參數(shù)。另外在電路剛啟動時,避免出現(xiàn)主模塊負載過重情況,加入了主模塊限流功能。

圖6 均流算法流程圖
3.3 優(yōu)化調(diào)節(jié)速度
主從模塊調(diào)節(jié)速度的設(shè)定取決于電路輸出電壓響應時間和電路效率。因為本實驗電路結(jié)構(gòu)相同,器件參數(shù)近似,其電流不匹配程度小,響應時間幾乎相同,電路效率相近,所以電壓響應時間和電路效率基本相近。實驗中分別測試主從模塊電路在額定功率輸出情況下效率為85.2%和86.4%,得出需設(shè)置主模塊PWM波初始占空比略大于從模塊,可降低其初始電流不匹配度。要保證均流的穩(wěn)定性和精度,需確保從模塊調(diào)節(jié)時間小于主模塊,即從模塊的電流調(diào)節(jié)速率大于主模塊。在代碼實現(xiàn)方面,首先開啟定時器中斷,根據(jù)系統(tǒng)對輸出電壓的響應時間設(shè)置合適的中斷頻率f=500 Hz,在中斷中設(shè)置分頻變量,使主從模塊調(diào)節(jié)占空比的速率為1:2,即主模塊的PWM調(diào)節(jié)速率為250 Hz,從模塊的PWM調(diào)節(jié)速率為500 Hz。
3.4 設(shè)置較低的比例系數(shù)和較高的積分環(huán)節(jié)系數(shù)
由于各模塊的PID參數(shù)根據(jù)不同的電路參數(shù)需要大量時間調(diào)試,而且引入較大的比例環(huán)節(jié)有可能引發(fā)電路振蕩,所以調(diào)試中將比例系數(shù)降低到很小,增大其積分環(huán)節(jié)的系數(shù)。為了避免積分誤差累加過大,設(shè)置了飽和上下限,當積分誤差累加到上限或下限時,誤差不再累加。實驗中設(shè)置從模塊的積分參數(shù)和比例參數(shù)略大于主模塊。因為兩個模塊調(diào)節(jié)速率的不同已經(jīng)能保證跟隨的成功率,而PID系數(shù)的設(shè)置是為了降低電源模塊差異性對調(diào)節(jié)穩(wěn)定性的影響,降低瞬態(tài)調(diào)節(jié)過程中電流的不匹配度,增大改進的主從控制算法的適用范圍。
3.5 設(shè)置主模塊限流保護
在主模塊調(diào)節(jié)的過程中,為了避免一開始主模塊PWM調(diào)節(jié)速率過快,導致其負載電流過大。所以根據(jù)實際輸出需求,限制其最大輸出電流為4A,在主模塊負載電流未達到4A前,主模塊調(diào)節(jié)負載電壓保持恒定8 V,超過4A時,PWM調(diào)節(jié)主模塊負載電流恒流,調(diào)節(jié)使其負載電流維持在4A。
3.6 使用軟啟動技術(shù)
由于階躍響應是系統(tǒng)動態(tài)性能中最為嚴峻的工作狀態(tài),在改進控制策略的情況下,采用軟啟動技術(shù),先降低目標參數(shù)Vref,然后分級逐步增加Vref值直到設(shè)定的最終值8 V,這樣可以大大降低超調(diào)量過大引發(fā)系統(tǒng)振蕩的可能性,程序?qū)崿F(xiàn)流程如圖6所示。實驗中定時時間根據(jù)電路輸出電壓動態(tài)響應時間設(shè)置,實驗測量雙向DC -DC電路支路電流從0到滿載2.5 A電流且輸出電壓為8 V的穩(wěn)定時間為62.8 ms。根據(jù)測得的穩(wěn)定時間設(shè)置定時累加時間,使其略大于穩(wěn)定時間,可確保系統(tǒng)調(diào)節(jié)到目標值后穩(wěn)定,例如70 ms。然后將Vref從低到高分成幾段,本實驗設(shè)置為10段,每經(jīng)過70 ms,改變目標參數(shù)使其增加0.8 V,累加到設(shè)定值8 V后保持不變。
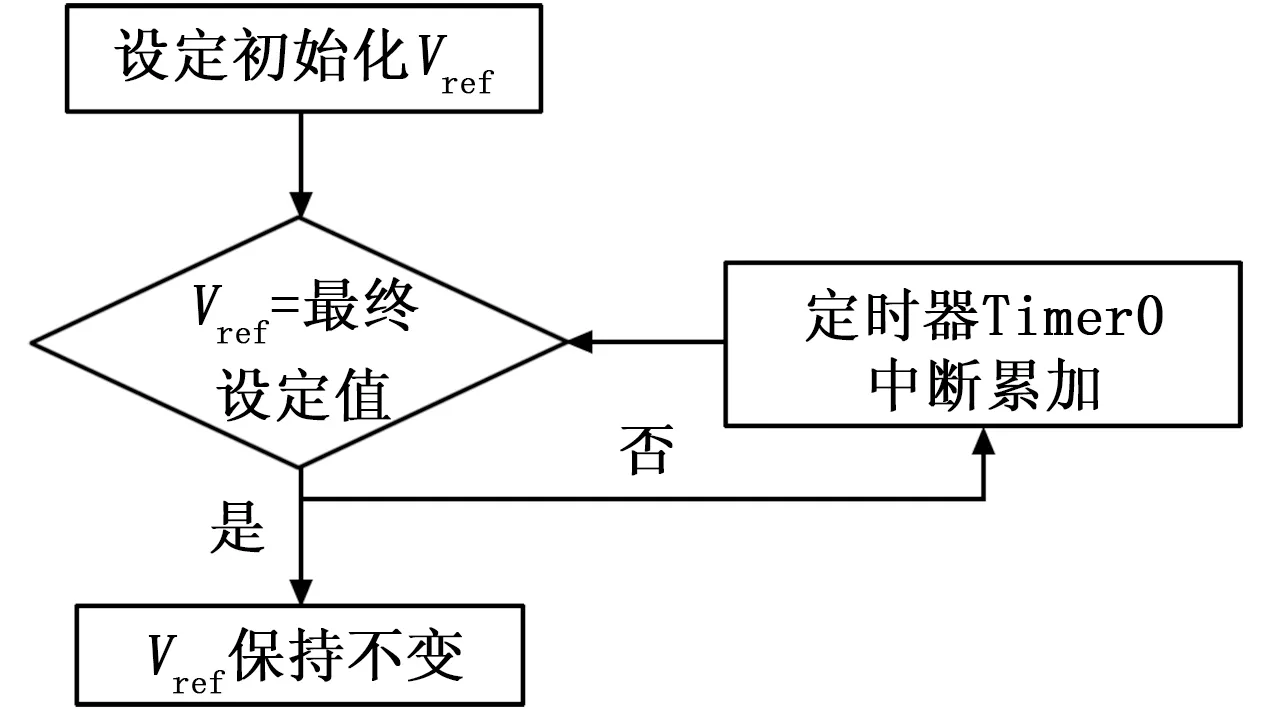
圖7 軟啟動程序框圖
4 實驗結(jié)果與分析
4.1 實驗步驟和方法
在系統(tǒng)調(diào)試過程中,首先設(shè)置PWM低調(diào)節(jié)速率和PID低比例環(huán)節(jié)參數(shù)和積分環(huán)節(jié)參數(shù),逐步增加主從模塊的調(diào)節(jié)速率和積分環(huán)節(jié)參數(shù),調(diào)試主要以改變PWM調(diào)節(jié)速率為主,即改變其定時器中斷的頻率。測量輸出電壓穩(wěn)態(tài)波形和精度,各模塊輸出電流瞬態(tài)和穩(wěn)態(tài)電流變化波形及其電流穩(wěn)態(tài)調(diào)節(jié)精度。經(jīng)過參數(shù)優(yōu)化,實驗數(shù)據(jù)和波形如圖8所示。
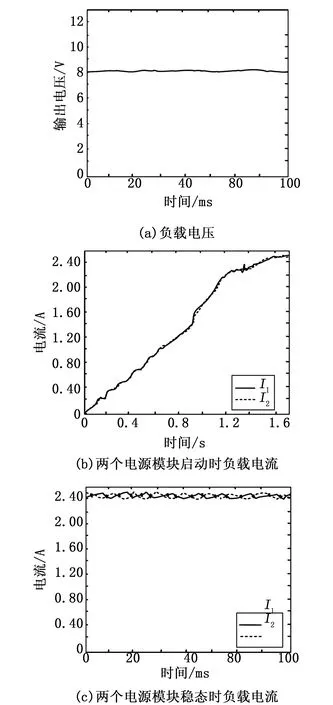
圖8 均流實驗負載電壓電流波形
4.3 實驗結(jié)果分析和不足
從圖8(a)看出,系統(tǒng)輸出電壓在8 V輕微低頻振蕩,振蕩幅度小于0.2 V 。圖8(b)和8(c)中I1為主模塊輸出電流,I2為從模塊輸出電流。兩但其平均值相同,穩(wěn)態(tài)均流效果良好,振蕩幅度小于0.2 A。瞬態(tài)輸出電流曲線幾乎重合,主從電流偏差小于0.1 A,到穩(wěn)態(tài)過程中未出現(xiàn)超調(diào)量過大現(xiàn)象,從而說明系統(tǒng)的瞬態(tài)調(diào)節(jié)穩(wěn)定。在0~0.8 s期間,電流變化波形呈現(xiàn)分段上升,在這期間電流偏差小于0.05 A,電流不匹配度低,說明分段上升對使用PID調(diào)節(jié)電路瞬態(tài)負載電流具有抑制其振蕩的作用。電流從0到滿載調(diào)節(jié)時間為1.6 s,較為迅速。均流具體實驗數(shù)據(jù)如表1所示,負載總電流I變化范圍為0.94~5.55 A,均流比例為1:1,均流精度均小于1.3%,輸出電壓Uo=8±0.01 V,調(diào)整率小于0.3%。

表1 均流電流I1:I2=1:1實驗數(shù)據(jù)
其中均流精度計算公式為:
(8)
其中:k為主從模塊負載電流比例。
在均流實驗中,也進行了電流比0.5到2任意比的并聯(lián)測量實驗,表2為電流比為2的實驗數(shù)據(jù),負載總電流從1.5~5.1 A范圍內(nèi)變化,負載電流均流精度均低于1.5%。從表3可知,該系統(tǒng)在電流比0.5~2范圍內(nèi)都有較高的均流精度,最大均流誤差小于1.5%。

表2 均流電流I1:I2=2:1實驗數(shù)據(jù)
實驗過程中進行了100次電路上電啟動,啟動測試雙向DC-DC電路參數(shù)從0 A到滿載5 A,均流電流比例0.5~2,測試過程中均未出現(xiàn)電路故障現(xiàn)象,電源輸入電流平穩(wěn)上升,未出現(xiàn)瞬態(tài)電流過大拉低輸入電源電壓現(xiàn)象,證明本系統(tǒng)穩(wěn)定性良好。

表3 均流比例k=0.5~2實驗數(shù)據(jù)
本系統(tǒng)不足之處在于系統(tǒng)數(shù)字信號控制器DSPIC30F4011的32 MHz主頻偏低,使得PWM調(diào)節(jié)精度較低,10位ADC采樣模塊精度較低,最終均流調(diào)節(jié)精度不高。若改進使用更高主頻的DSC和外接更高采樣位數(shù)的ADC芯片,可大幅度提高其電流調(diào)節(jié)精度。
5 結(jié)束語
本文提出了一種電源模塊數(shù)字主從控制法的改進算法,并設(shè)計了基于該算法的并聯(lián)雙向直流電源。該算法的創(chuàng)新之處在于降低并聯(lián)電源主從控制中主模塊出現(xiàn)故障和系統(tǒng)癱瘓的概率。試驗結(jié)果表明了限制主模塊最大輸出電流、電路啟動時主模塊采用軟啟動控制等技術(shù)對于改善在穩(wěn)態(tài)和瞬態(tài)過程的均流效果都較為有效。但其算法需要在主從模塊初始狀態(tài)不匹配程度較小的情況下才能實現(xiàn),且需要保證主從電路參數(shù)差異不大。基于此算法的系統(tǒng)設(shè)計穩(wěn)定,均流精度高,可應用在汽車照明、功率放大等低壓大電流的系統(tǒng)中。
猜你喜歡
作文·小學低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學低年級(2024年2期)2024-04-29 00:00:00
作文·小學低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
