融合手機和無人機多傳感參數的運動目標跟蹤方法
2018-08-24 07:51:58,,
計算機測量與控制 2018年8期
,,
(浙江工業大學 信息工程學院,杭州 310023)
0 引言
四旋翼無人機具有自由度高,環境適應能力強等優點,在航空拍攝、交通巡邏、軍事偵察等領域有廣闊的應用場景。無人機運動跟蹤的本質是通過估計無人機與運動目標之間的相對位姿來實現無人機對運動目標的跟蹤。相對位姿的估計在航天器對接[1]、空中自主加油[2]、無人機編隊飛行[3]等領域應用廣泛,相對于依靠單傳感器數據的相對位姿估計方法,基于多傳感器數據融合[4-5]的方法能夠提高位姿估計的準確性。隨著半導體技術的發展,傳感器的成本和體積大大減少,以及CPU處理性能的提升,使得融合多傳感器數據的相對位姿估計方法在小型旋翼無人機的運動跟蹤場景中應用成為可能。探究更高效準確的多傳感數據融合的無人機跟蹤方法,是當前的一個研究熱點。
基于單傳感器的相對位姿估計方法主要采用GPS、激光、視覺傳感器等。Shao Mingqin等人[6]研究了位置差分,偽距差分和相位差分3種常用的差分GPS方法,發現位置差分方法最容易實現但精度最低,偽距差分方法精度較高且限制較少,所以得到廣泛應用,相位差分方法精度最高但由于限制較多而應用有限。基于差分GPS的方法有一個明顯的缺點,當在GPS信號弱或者缺失的地方,將會失效。Karl E.Wenzel等人[7]提出了基于視覺傳感器的相對位姿方法,跟隨無人機通過PnP方法計算得到與領航無人機的相對位姿,實現無人機的編隊飛行。文獻[8]中給出了另外一種相對位姿的估計方法POSIT,該方法可以在只有少數特征點的情況下,通過迭代求出物體姿態的近似解。但是基于圖像的方案仍面臨兩個主要問題:1)因相機運動而產生的圖像退化造成的運動目標錯檢的情況,由于在目標跟蹤中需要控制相機或者相機載體運動,因此獲取到的圖像也經常會產生圖像退化的情況從而對運動目標的提取和識別產生了影響;2)大量的圖像計算對處理器平臺的計算能力要求高,基于圖像的目標跟蹤包含了大量圖像運算和圖像的運動補償,因此對于計算平臺的要求較高,普通的嵌入式平臺難以勝任。
融合多傳感器數據的相對位姿估計方法,通過在單傳感器方法的基礎上引入其他傳感器加以輔助以得到更精確的相對位姿估計。Zhu Yunfen等人[9]提出了基于SINS/GPS/IRST的無人機空中加油方法,該方法通過計算獲得加油機與無人機的相對慣導信息和相對GPS信息,同時通過無人機上紅外線傳感器得到無人機與加油機之間的距離,然后將三者數據進行融合獲取到無人機與加油機的相對位姿,實現無人機的空中加油。Jeremy Hardy等人[10]針對GPS信號部分地區無法使用且易受惡意劫持的情況,提出了一種基于視覺-IMU數據融合的無人機編隊飛行方法,該方法使用點對點的無線電傳輸無人機的IMU數據,計算得到無人機之間的相對位姿,然后通過固定在無人機上朝下的相機提出特征信息來計算無人機之間的相對位姿,最后通過卡爾曼濾波融合數據得到無人機之間的相對位姿關系。王龍等人[11]提出了緊耦合的視覺/INS相對位姿測量方法,并通過實驗證明緊耦合的方法相比于松耦合,有更高的實時性和測量精度。
本文結合相對位姿中多傳感器融合的方法,提出了基于EKF(Extended Kalman Filter,擴展卡爾曼濾波)的融合手機和無人機多傳感參數的運動跟蹤方法。
1 基于EKF的多傳感參數的融合方法
如圖1所示,無人機上裝有視覺傳感器和慣性傳感器,運動目標(本文以人體運動為例)持有具備IMU的移動設備,手機通過Wi-Fi將IMU數據發送給無人機,然后無人機將3個傳感器的數據作為輸入進行數據融合,最后實現無人機對運動目標的運動跟蹤。IMU有采樣頻率快的特點,能夠在快速劇烈運動的情況下得到運動狀態,但是由于陀螺儀和加速度計本身存在測量誤差,在長時間的計算過程中會產生漂移的情況,融合視覺傳感器數據能夠有效的抑制漂移;同時在視覺傳感器出現遮擋或者錯檢情況時,可暫時依靠IMU數據進行跟蹤,從而提高系統的魯棒性。本文通過將視覺傳感器獲取到的運動目標特征點坐標直接與IMU獲取到的相位位姿進行融合,簡化相對位姿求解過程,實現多傳感器融合的無人機實時運動跟蹤。
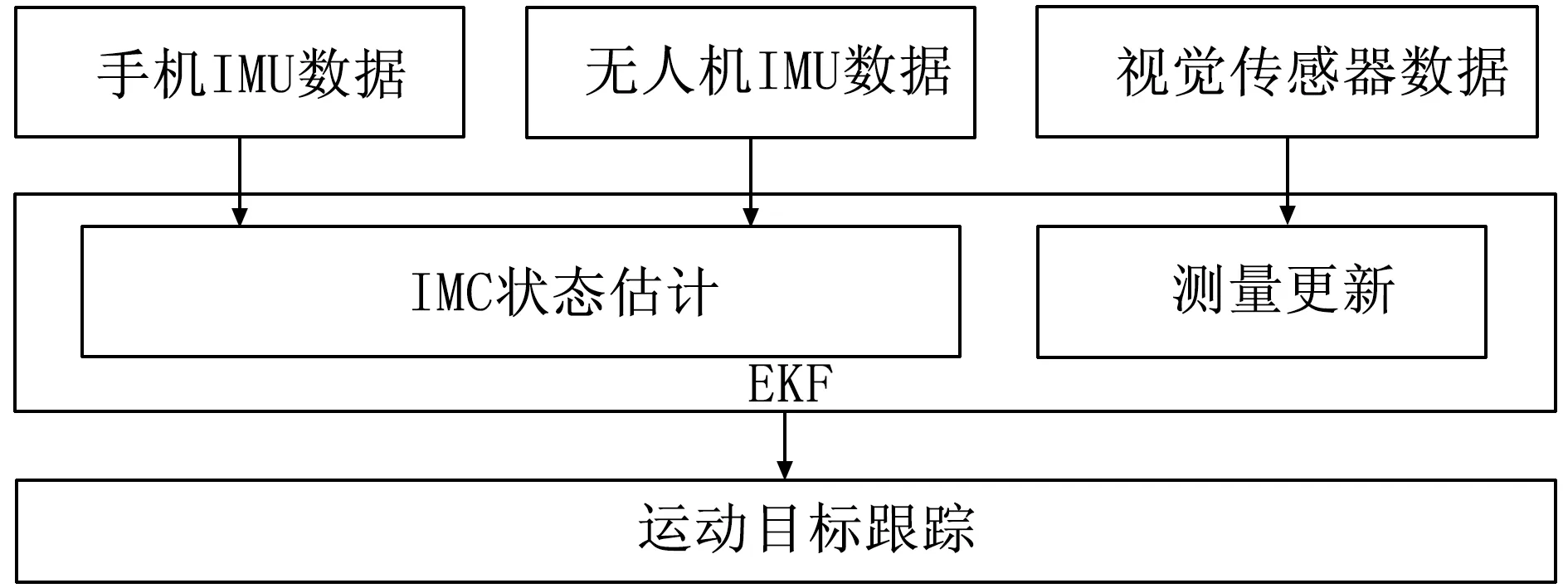
圖1 無人機運動跟蹤系統示意圖
EKF方法通常包括狀態估計和測量更新兩個部分,本小節將詳細介紹系統的狀態估計部分。基于視覺傳感器數據的狀態估計計算量大,且相對于IMU的更新頻率太低,所以使用IMU來進行狀態估計更符合系統要求。
同時由于多傳感器的存在,需要先將所有數據轉換到同一坐標系,再進行數據的融合。本文坐標系定義如圖2所示,世界坐標系為G,無人機IMU坐標系Iu,無人機相機坐標系C以及運動目標IMU坐標系It。
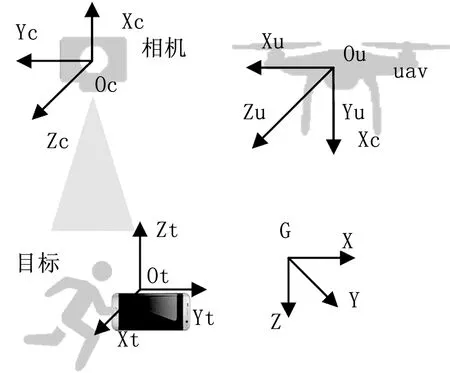
圖2 系統坐標系定義
1.1 IMU狀態模型
IMU由三軸陀螺儀和三軸加速度計組成,陀螺儀可以獲取到IMU自身的旋轉角速度,加速度計則可以獲取到自身的線性加速度,由于測量誤差的存在,給出IMU的測量模型[12]:
ωm=Iω+bg+ng
(1)
(2)

已知IMU的測量模型,可以得到IMU的狀態向量:
(3)

(4)

(5)
其中:|Iω(t)×|表示反對稱矩陣,可由式(6)得到:
(6)
在無人機運動跟蹤過程中,需要時刻估計無人機與運動目標的相對位姿,由式(1)、(2)可以得到角速度和線加速度的估計(不考慮測量高斯白噪聲n),分別由式(7)、(8)給出:
(7)
(8)
再根據式(7)、(8)進行離散化(雅各比矩陣)可以得到[k,k+1]時刻的狀態估計值:
(9)

1.2 IMU誤差狀態模型

(10)

?δq
(11)

(12)
在確定系統誤差狀態向量后,根據IMU運動連續時間狀態公式(4)和IMU狀態估計公式(9)得出IMU誤差狀態連續時間轉移矩陣:
(13)
(14)
將誤差轉移方程離散化,可以得到Fd和Gd,用于求IMU估計過程中的協方差,設協方差P的初始值為零,P的更新方程如式(15)所示:
Pk + 1=Fd·Pk·FdT+Gd·Q·GdT
(15)
式(15)中,Q為噪聲矩陣,如式(16)所示:
(16)

(17)
(18)
(19)

2 視覺測量更新
在獲取到無人機和運動物體的狀態估計后,需要通過觀測量對狀態估計進行更新。本文將視覺傳感器的輸入作為觀測量,通過特征點檢測算法檢測運動物體,建立測量更新方程來對IMU狀態估計進行更新,最后將修正后的狀態發送給無人機控制系統。本文選擇將檢測到的運動目標圖像坐標直接作為EKF的輸入,避免需要大量計算負載的PnP算法求解,提高系統的實時性。
圖像數據的處理使用ORB算法[14],ORB算法采用運算速度非常快的FAST角點檢測子,并針對FAST特征不具備方向的問題,加入了FAST特征的方向信息;特征點描述部分則是在BRIEF的基礎上改進了其對圖像噪聲敏感和不具備旋轉不比性的特點;雖然在特征點的描述細致程度上不如SIFT[15]和SURF[16]算法,但是在計算速度上,ORB性能明顯優于兩者,針對嵌入式平臺計算能力有限和本文對實時性的要求,本文選擇ORB算法提取特征點。
2.1 測量方程

(20)


(21)

(22)
CPtar=ICR·GIR(GPtar-GPuav) +ICR·IPC
(23)


(24)
其中:Hf為測量雅克比矩陣,由h(x)求導獲得,見式(25):
(25)
2.2 狀態更新
在確定測量更新模型之后,可以得到完整EKF系統方程:
(26)
可根據EKF迭代得到無人機和運動目標的誤差狀態估計值,然后用于校正IMU狀態估計。
3 實驗分析
本文中多傳感器的時間戳同步是數據融合的關鍵,無人機與移動設備上的IMU采樣頻率存在差異,無人機IMU的采樣頻率可以達到200 Hz或更高,而移動設備上的IMU受限于硬件性能,采樣頻率普遍在50~100 Hz,且兩者無法做到絕對的時間戳同步,本文針對這個問題,采用ROS[18](Robot Operating System,機器人操作系統)的消息同步機制,將無人機與移動設備的IMU數據進行相對時間同步,然后將獲取到無人機和手機的狀態估計。本文中相機的采樣頻率為30 Hz,圖像分辨率為752×480,通過使用文獻[19]的方法,在相機采樣時刻,選取距當前時刻最近的IMU狀態估計,進行測量更新,校正狀態估計。
作為實驗所需條件之一,本文編寫了一個Android APP用于采集手機中IMU的數據,并將數據轉化為ROS消息格式,然后通過Wi-Fi傳輸給無人機,實驗中使用的手機是三星Galaxy S7 edge,該機使用的IMU傳感器為LSM6DS3,同時無人機將使用LP-RESEARCH公司的LPMS-USBAL傳感器,實驗平臺搭建如圖3所示。
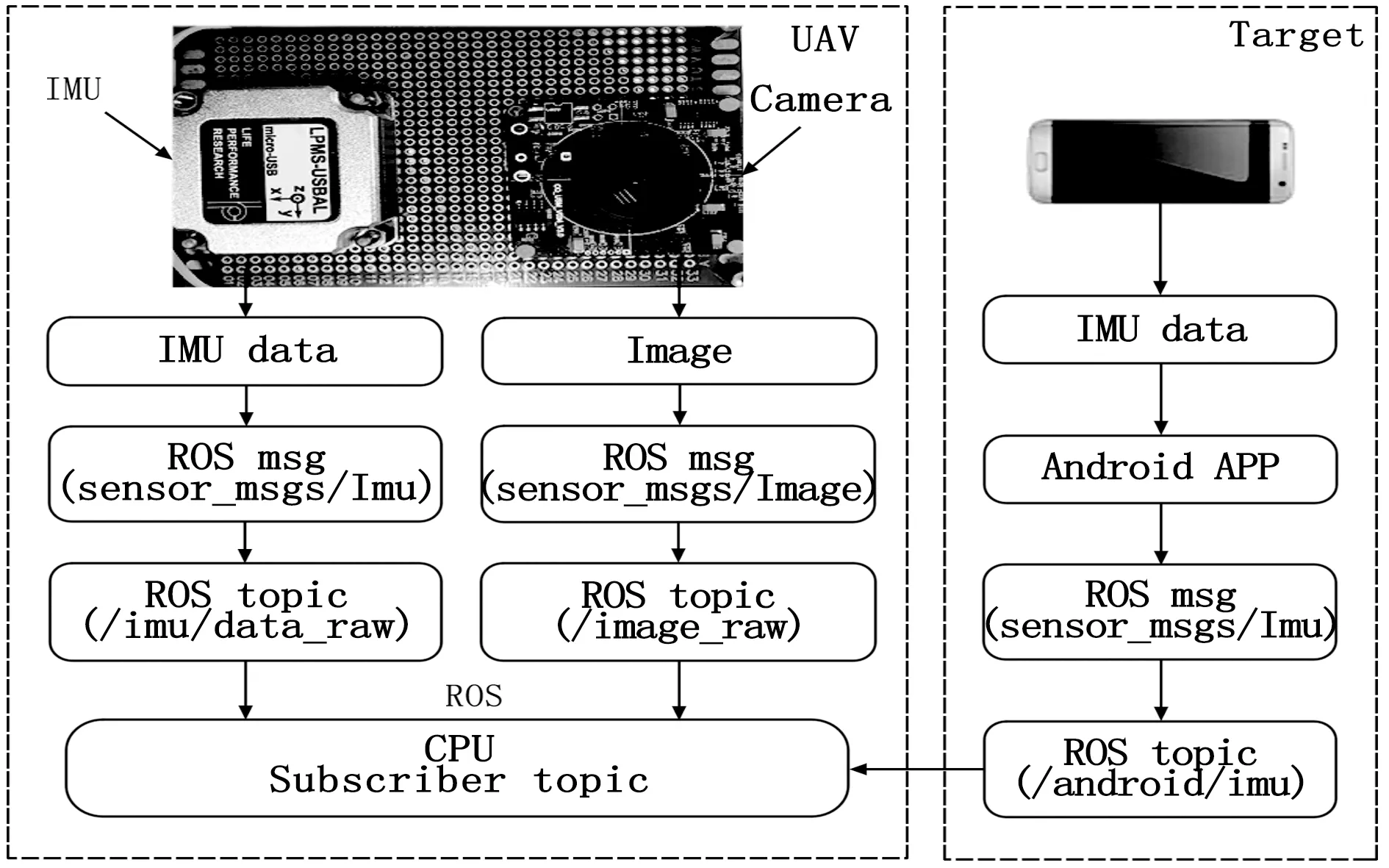
圖3 無人機運動跟蹤實驗平臺搭建
獲取到需要的傳感器參數后,本文針對應用場景制作了兩類數據集,一類模擬無人機懸停,運動物體運動的場景;另一類則模擬無人機跟隨運動物體運動的場景。實驗中本文方法將通過與基于圖像的POSIT方法進行比較,驗證本文方法的準確性。
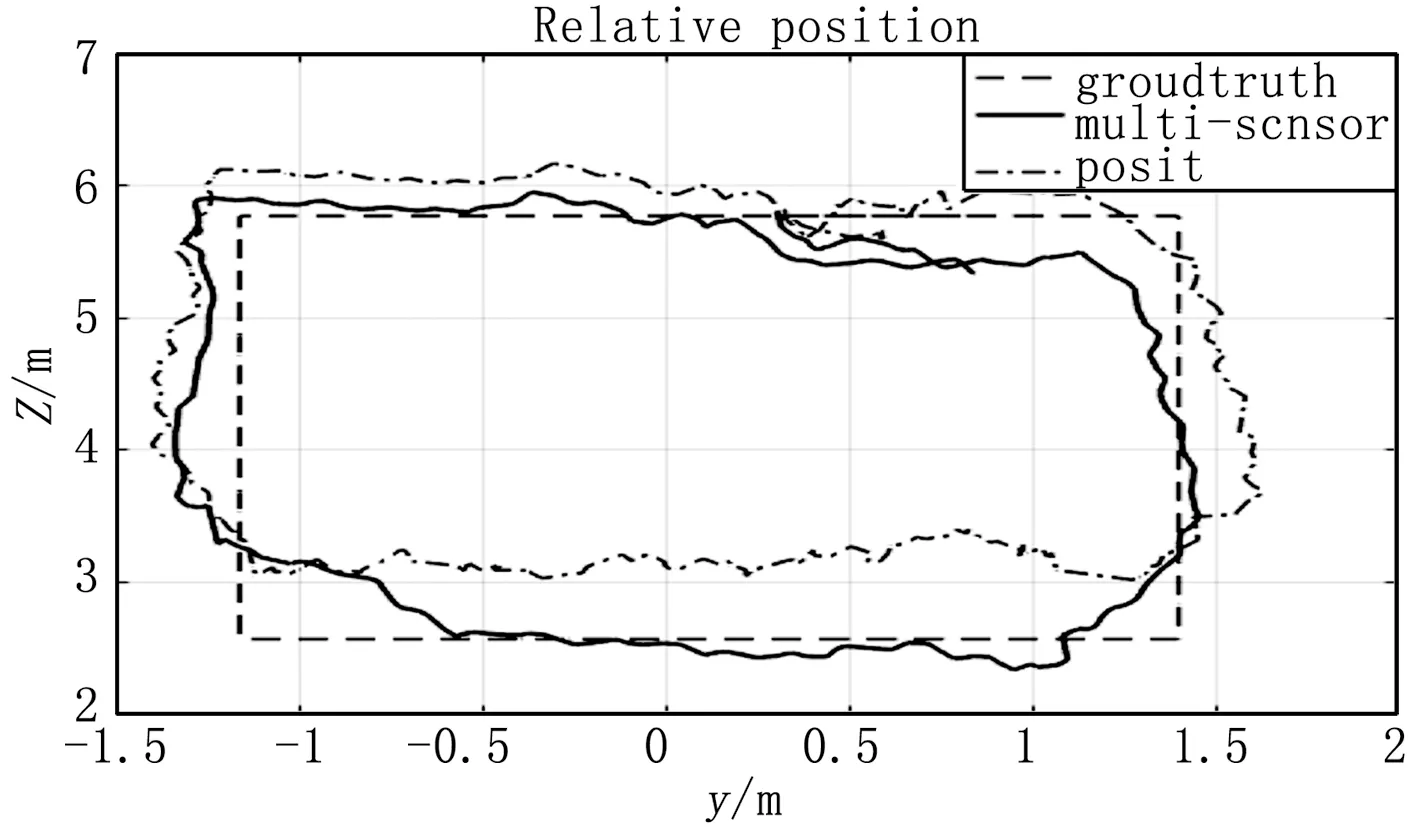
圖4 無人機懸停場景下的相對位置
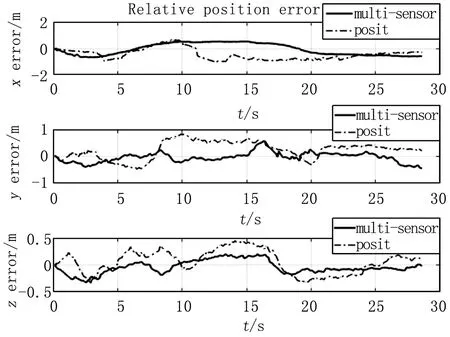
圖5 無人機懸停場景下的相對位置誤差
其中圖4給出了無人機懸停場景下無人機與運動目標的相對位置,其中虛線部分為運動目標走過的真實路線,實線部分和點劃線則分別是本文方法計算得到的相對位置和POSIT方法計算得到的相對位置,圖5則表示無人機懸停場景下本文方法和POSIT方法計算的相對位置誤差;無人機跟隨運動場景下無人機與運動目標保持同一速度和方向做直線運動6 m,同時保持無人機與運動物體之間的距離不變,圖6代表無人機運動跟蹤場景下的產生相對位置誤差,同樣實線代表本文方法,點劃線為POSIT方法。兩種場景下的相對位置誤差如表1所示,從表中可以得出,不論無人機懸停或者跟蹤場景下,本文方法得到的相對位置誤差都要優于POSIT方法。無人機懸停情況下,本文方法得到的相對位置誤差為0.67 m,跟蹤場景下為0.273 m。
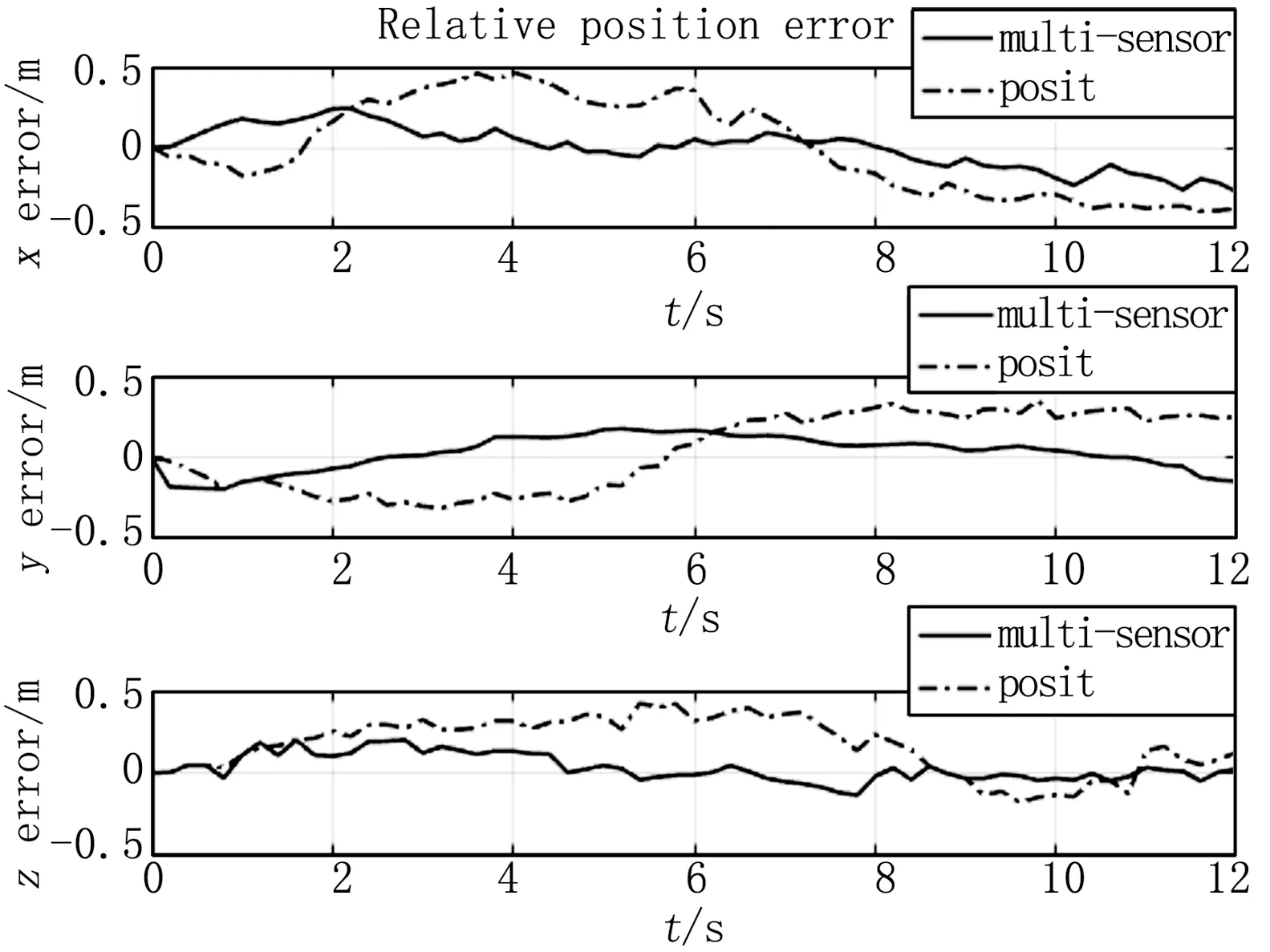
圖6 無人機跟蹤場景下的相對位置誤差
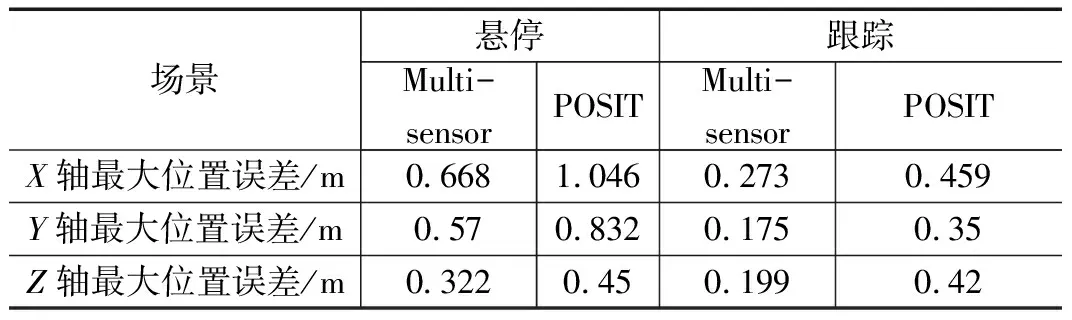
表1 相對位置誤差
4 結論
本文提出融合手機和無人機多傳感器參數的無人機運動目標跟蹤方法用于解決基于單目視覺傳感器運動跟蹤中存在的問題。通過設計Android APP將手機中的IMU數據通過Wi-Fi傳輸給無人機,使得無人機可以通過使用手機和無人機的IMU數據用于系統狀態估計,然后通過視覺傳感器獲取的運動目標圖像坐標作為擴展卡爾曼濾波的測量更新修正IMU狀態估計產生的誤差。最后通過實測數據集模擬無人機懸停和無人機跟蹤場景,證明本文設計的方法在無人機的運動目標跟蹤中能夠達到0.67m的定位精度,相對于單目視覺的方法有更高的精度。為了驗證該方法在無人機上的實際效果,未來的工作需要在無人機上運行本方法,并進行調試,同時將針對以人體為運動目標的場景擴展到其他應用場景。
猜你喜歡
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現代出版(2020年3期)2020-06-20 07:10:34
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
