機械臂軌跡跟蹤云模型控制器設計
2018-08-25 08:14:28付譽,李眾
電子設計工程 2018年16期
付 譽,李 眾
(江蘇科技大學電子信息學院,江蘇鎮江212003)
隨著工業的快速發展,機械臂在我國機械、制造等行業已是必需的設備。而在實際應用中機械臂軌跡的微小偏差就很有可能損害到機械臂本身,甚至是對外界的人或者環境帶來極大的破壞。因此使機械臂軌跡能夠快速、準確地跟蹤上期望軌跡已成為我們的研究目的[1]。目前國內外很多學者對機械臂軌跡跟蹤控制問題進行了全面的研究,文獻[2]利用并聯模糊推理設計了機械手控制力矩控制器,該方法雖然魯棒性強且對動態系統不確定性問題進行了補償,但模糊規則的建立則是相當麻煩,在控制過程中控制規則等不能作修改,控制的自適應能力有限。文獻[3]提出了兩種基于神經網絡的機器人魯棒控制算法。魯棒控制雖然不需有精確的過程模型作為基礎控制系統的魯棒穩定性也能保證。但是一般假設系統的過程動態特性以及它的變化范圍,具有一定的局限性。文獻[4-5]針對具有外部干擾和重復性任務的機器臂的軌跡跟蹤問題,提出了迭代學習控制相關的控制方法。系統的收斂速度得到了提高,但迭代學習比較復雜且實現周期長。文獻[6]將經典滑模控制器轉化為具有簡單規則庫的模糊滑模控制器來實現機械臂的最佳軌跡跟蹤,并進行了仿真研究。當被控對象進入滑模面后,滑模變結構控制對外界的干擾和參數變化具備某種不變性且響應快速,明顯比其他控制系統魯棒性要強,但其所產生抖振問題是難以避免的。
云模型在實現復雜非線性系統的控制中,不需要有精確的控制對象數學模型,還能夠使環境中各種未知的不確定性因素得到保留,具有強大的非線性處理能力和工程實用性[7-8]。由于機械臂系統是一個高度耦合、多輸入多輸出的復雜非線性系統,外部擾動大,且又要求較高的跟蹤精度,其運動的數學模型非常復雜且不易建立,對機械臂的軌跡跟蹤是一個比較困難的控制問題[9]。為了提高智能控制對參數變化的魯棒性等問題,有學者提出了使用傳統建模方式為基礎的經典控制理論和現代控制理論相結合的方法,但是這種方法很難設計出適當的控制器且雖然提高了對參數的魯棒性,但是只在穩態時效果更佳且響應速度較慢。
因此,本文將要研究一種高精度且對不確定非線性因素具有較強適應性的云模型控制方法。提出了一種基于一維云模型的機械臂軌跡跟蹤控制器設計。目的在于解決機械臂存在的死區、未知負載等非線性因素的影響下軌跡跟蹤控制問題,提高軌跡跟蹤控制系統的操作性能,使機械臂能夠快速、精確地沿著目標軌跡運行。
1 機械臂軌跡跟蹤系統的數學模型
1.1 機械臂的坐標系建立
由圖1可知,它由質量分別為為m1,m2的連桿L1,L2構成。電機給出的驅動力矩τ1、τ2分別驅動連桿L1、L2,底座、L1、L2之間過旋轉關節連接。坐標系Χ1Υ1Ζ1和Χ2Υ2Ζ2分別固定在兩個連桿上。而操作空間則用坐標系ΧΥΖ表示,其原點及Ζ軸與Χ1Υ1Ζ1重合。用l1,l2來表示連桿的臂長,質心距連桿接點長度為長度為r1和r2。
1.2 機械臂的數學模型
n自由度機械臂的動態過程如下數學模型描述為:

式中q∈Rn為關節位置坐標向量,M(q)∈Rn×n為機器人的慣性矩陣,C(q,?)∈Rn表示離心力和哥氏力,G(q)∈Rn重力項,F(?)∈Rn表示摩擦力矩,τ∈Rn為控制力矩,τd∈Rn為外加擾動,具體包括建模誤差,參數變化及其他不確定因素[10]。
采用層次回歸分析法進一步探索社會認知兩大基本維度對中庸思維各因子獨特成分的解釋作用。在第一層回歸納入非因變量的中庸思維因子,第二層納入能動性與社群性。結果發現(表3),社群性依舊對多方思考、和諧性有預測作用,對整合性的預測變為不顯著。
其動力學模型如圖2所示。

圖1 二自由度機械臂示意圖

圖2 機械臂的動力學模型
2 云模型控制器設計
2.1 云模型概念
云模型是表示定性概念與定量表示之間不確定性轉換過程的模型,數字特征用均值(Ex),熵(En)和超熵(He)3個數值來表示[11-12]。設U是一個精確數值表示的集合U={x},稱為論域,T為U中的模糊集合,對于任意元素x∈U都存在一個有穩定傾向的隨機數,叫做x對T的隸屬度μ(x),μ(x)是U到閉區間[0,1]的映射。則稱μ(x)在論域U上的分布稱為云模型[13]。
2.2 云模型不確定性推理
云模型控制器將實現偏差到控制輸出的映射。根據已知的各種條件在某些環境下一步步推導得到目標規則的過程叫做云模型的不確定規則推理。云規則發生器一般由X條件云發生器和Y條件云發生器兩部分組成,即規則前件和規則后件[14]。
一維X條件云模型:

一維Y條件云模型:

式中(Ex,En,He)為X條件發生器的一維云模型數字特征;(Ey,En,He)為Y條件發生器的云模型數字特征;Ex為期望值;En為熵;He為超熵。μ為X條件云的輸出。
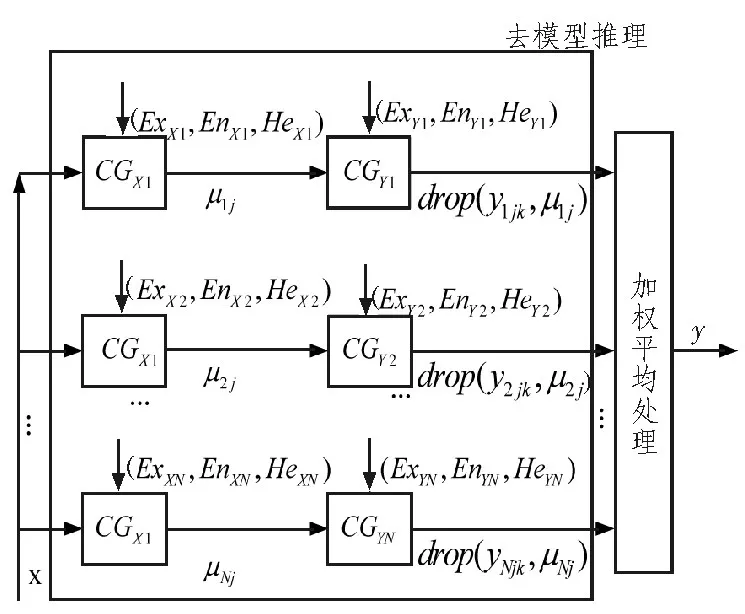
圖3 一維云模型映射器
如圖3所示,它可以反映N條推理規則:IFXiTHENYi,i=1,2,…,N。 當偏差輸 入x多次 刺激不同規則的前件部分CGX1~CGXN,會產生μNj值,然后μNj值再刺激對應的規則后件CGY1~CGYN,會輸出一組云滴drop(yNjk,μNj),通過計算云滴加權平均值,即輸入x到定量輸出y的映射[15-16]。
2.3 一維云模型軌跡跟蹤控制器設計
根據以上對一維云模型的描述,構造出機械臂軌跡跟蹤控制系統框圖如圖4所示。

圖4 軌跡跟蹤云模型控制器結構圖
云模型的特征參數設置如表1所示。

表1 規則發生器參數表
3 系統仿真
3.1 本文仿真控制對象的參數
為了驗證云模型控制方法的可行性及有異性,選取二自由度機械臂為被控對象進行Matlab仿真[17],通過分析圖2以及對機械臂系統動能、轉動慣量等計算[18],可以得到本文的機械臂在平面上運動的動力學模型:
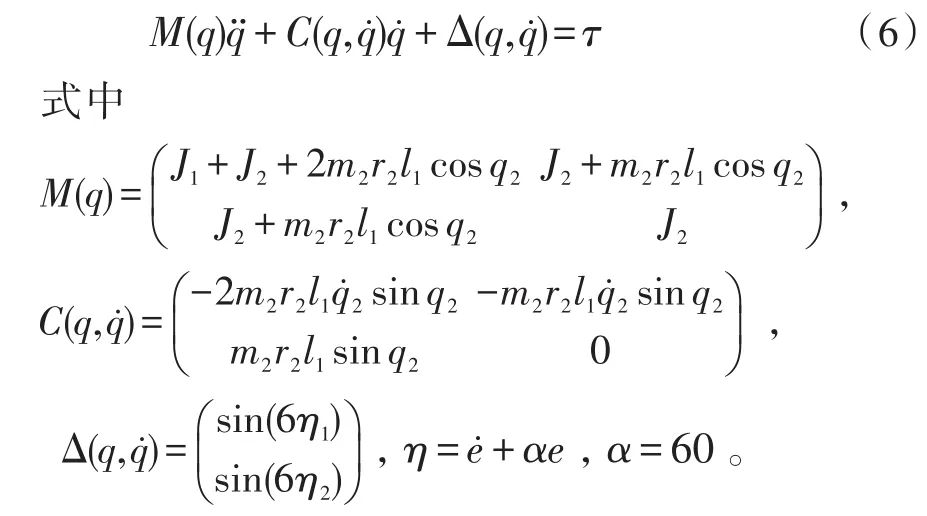
機械臂的各項參數的物理含義如表2所示。

表2 二自由度機械臂的標稱參數
設機械臂的操作平面用坐標x和y來表示,期望軌跡的坐標如表3所示。
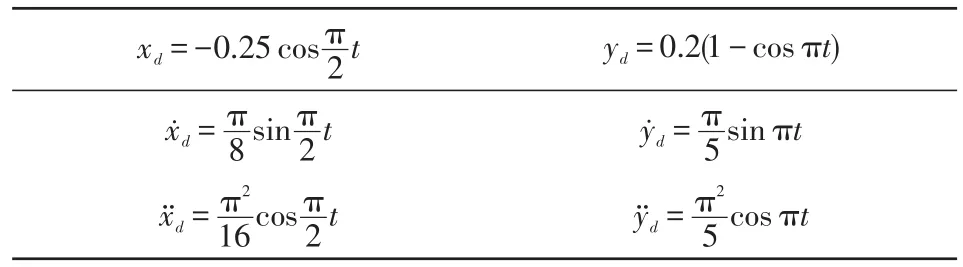
表3 期望軌跡的坐標
機械臂末端初始位置通過s函數設置,為,理想軌跡的初始位置為,仿真時間設為2 s。
3.2 仿真結果與分析
由圖5~8可以看出在云模型控制下關節1、2的位置誤差在0.2 s內就能趨于穩定,調節速度快且無較大波動。由圖9、10可以明顯的看到在云模型控制下的機械臂末端能夠準確地跟蹤目標軌跡,跟蹤精度也得到了明顯的改善。因此云模型控制算法對于非線性因素帶來的影響表現出了較強的適應性[19],保證了機械臂能夠快速精確地跟蹤目標軌跡。

圖5 PID控制的關節一的位置及誤差曲線

圖6 PID控制的關節二的位置及誤差曲線
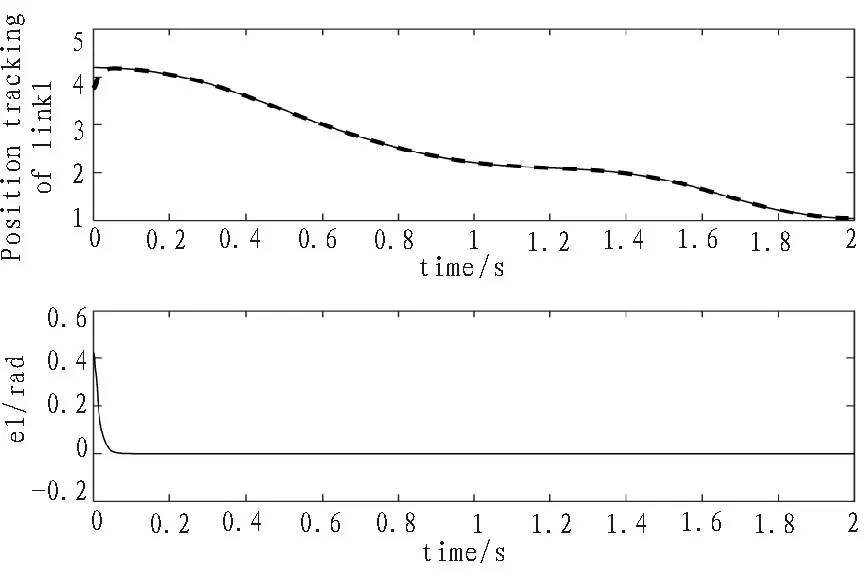
圖7 云模型控制的關節一的位置及誤差曲線

圖8 云模型控制的關節二的位置及誤差曲線

圖9 PID控制的機械臂末端軌跡曲線

圖10 一維云模型控制的機械臂末端軌跡曲線
4 結 論
機械臂軌跡跟蹤控制一直以來是控制學領域研究的重點內容,它關系到工業發展的安全性和可靠性。本文在被控對象存在非線性因素的情況下,提出了基于一維云模型的軌跡跟蹤控制設計方法[20],仿真結果顯示云模型控制算法能夠在不確定未知外界因素下能夠快速精確地跟蹤目標軌跡,適應性強,解決了機械臂軌跡跟蹤系統在復雜工作環境中的控制問題,使得機械臂軌跡跟蹤控制安全、持續、穩定運行,具有一定的實用價值。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
當代工人(2020年8期)2020-05-25 09:07:38
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學報(哲學社會科學版)(2016年9期)2017-01-15 13:52:02
光學精密工程(2016年6期)2016-11-07 09:07:19