鄭州市乘用車行駛工況的構建
2018-08-28 09:12:34高建平孫中博郗建國
機械設計與制造 2018年8期
高建平,丁 偉,孫中博,郗建國
1 引言
行駛工況用于確定車輛污染物排放量和燃油消耗量、新車型的技術開發和評估以及測定在交通控制方面的風險等是汽車工業的一項核心技術[1]。
文獻[2]采用了定步長截取法構建武漢市公交車工況,但最后構建的工況需要人為去修正,準確性不高;文獻[3]采用速度-加速度矩陣分析法構建了合肥市汽車行駛工況但只是單純的考慮用速度-加速度這一個特征參數來選擇速度片段,而沒有考慮其他特征參數對速度片段選擇的影響;文獻[4]提出一種以模型為基礎構建工況的方法,但這種方法理論性極強,給數據處理、程序編寫帶來了很大困難,實用性差。
基于上述情況,本研究從道路的實際交通狀況著手,通過對實際道路行駛工況進行運動學片段劃分并對其聚類分析,自動形成與實際交通狀況相對應的高速工況、中速工況、低速工況,最后從各類工況中選擇代表性工況組成鄭州市乘用車綜合工況。
2 實際行駛工況的采集
在廣泛查閱相關文獻的基礎上發現可以將車輛行駛工況的構建的技術過程歸納,如圖1所示。

圖1 車輛行駛工況構建的基本過程Fig.1 Basic Process of Vehicle Driving Cycle
試驗用車搭載為某公司開發的數據采集終端設備,如圖2所示。采樣間隔為1s。車載終端正常工作狀態下可與整車的ECU進行通訊,采集CAN總線的發動機轉速、發動機轉矩等信息,通過GPS模塊采集時間、速度、行駛里程、海拔等信息,通過連接GPRS網絡,把采集到的CAN信息和GPS信息發送至遠程服務器數據庫,實現對車輛實時數據的采集。
3 數據處理
3.1 短行程劃分
運動學片段(短行程):車輛從一個怠速開始到下一個怠速開始的運動過程[5],如圖3所示。在每個短行程中,定義4類工況:(1)怠速工況,發動機工作,但 v(車速)為 0的連續過程;(2)加速工況,a(加速度)≥0.15m/s2并且v≠0的連續過程;(3)減速工況,a≤-0.15m/s2并且 v≠0 的連續過程;(4)勻速工況,a <0.15m/s2并且v≠0的連續過程。

圖3 短行程示意圖Fig.3 Sketch Map of Short Stroke
本研究定義了12個反映短行程特征的特征參數,如表1所示。
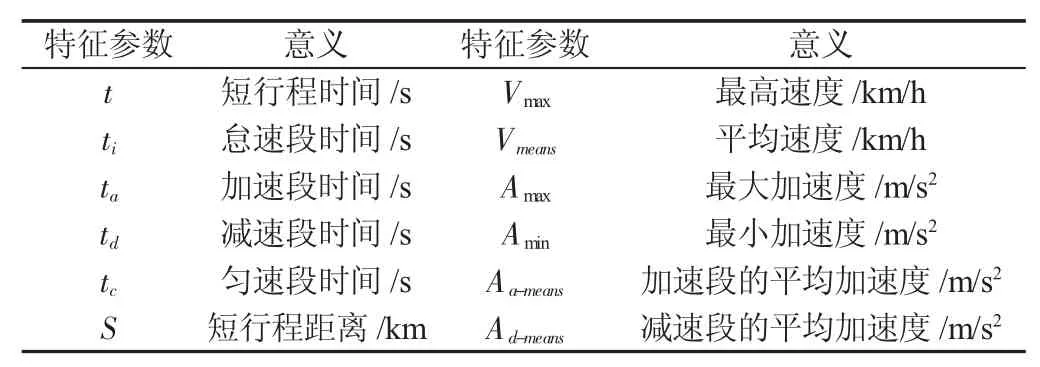
表1 短行程特征參數Tab.1 Short Stroke Characteristic Value
在MATLAB中編寫程序將采集的613792條行駛數據劃分為5555個短行程并求解出特征參數矩陣,如表2所示。
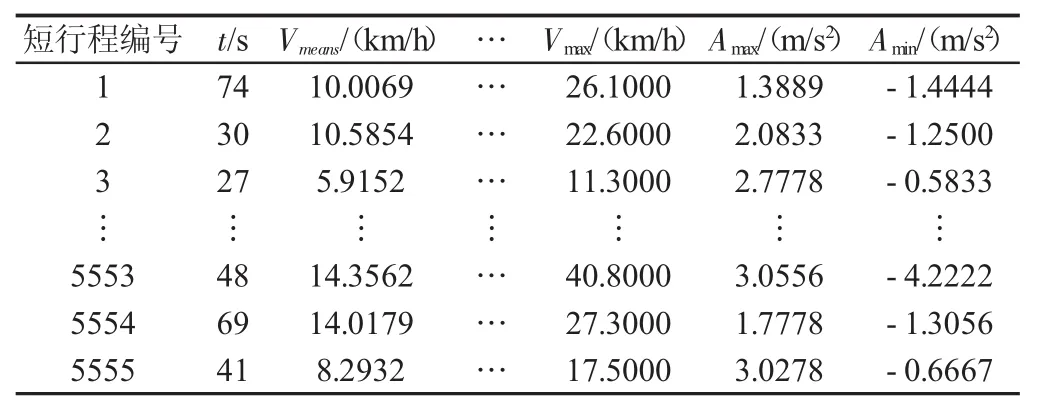
表2 特征參數矩陣Tab.2 Characteristic Parameter Matrix
3.2 主成分分析
為了減少計算量,引入主成分分析方法[6](PCA)對特征參數進行降維處理。在MATLAB中編制程序對特征參數矩陣進行PCA處理,前D個主成分的累積貢獻率計算公式為:
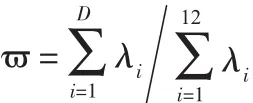
式中:λi—第 i個主成分的特征值。貢獻率表明 D1、D2、D3…D12綜合變量的能力,貢獻率越大綜合變量的能力越強。各主成分的貢獻率和累計貢獻率,如表3所示。
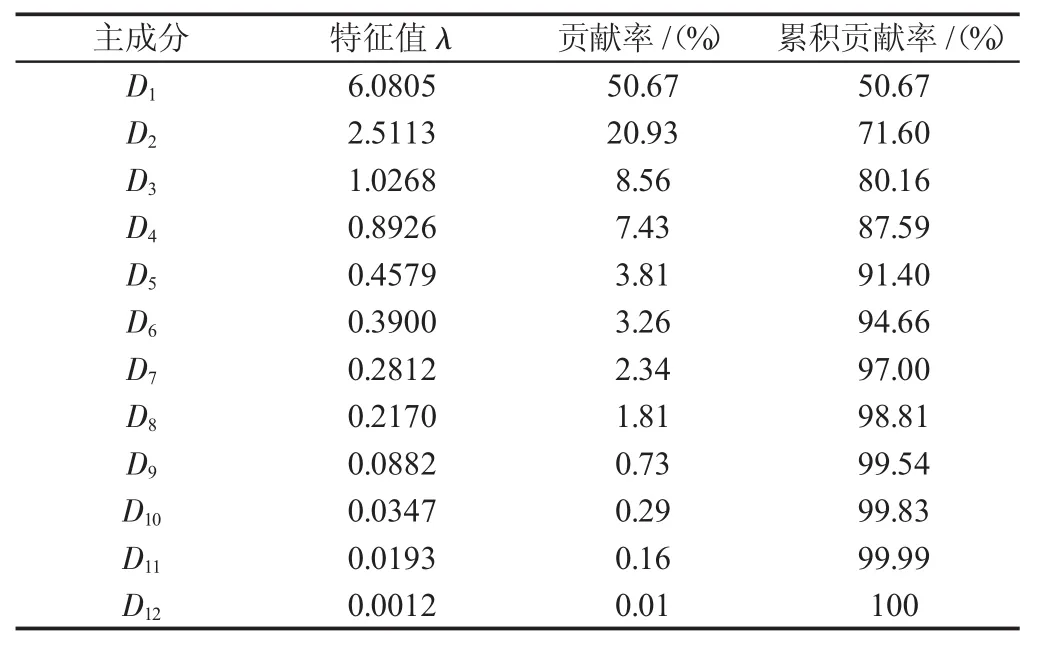
表3 主成分的貢獻率和累積貢獻率Tab.3 Contribution Rate and Cumulative Contribution Rate of Each Principal Componen
通過表3可以看出,前3個主成分的特征值都大于l以上并且前3個主成分特征值的累積貢獻率達到了80.06%,所以選取前3個主成分進行進一步分析,主成分分析的同時也可以得到主成分的得分矩陣[7],得分反映的是各主成分與其對應短行程的相關性,如表4所示。
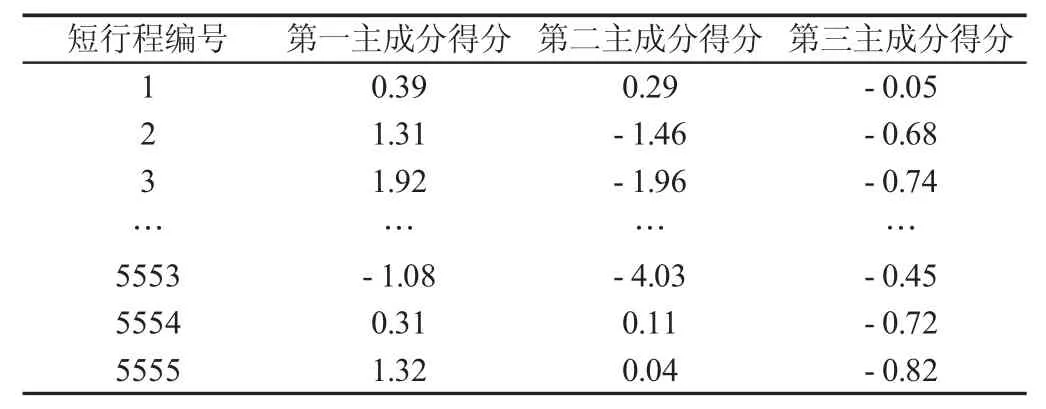
表4 短行程主成分得分Tab.4 Short Stroke Principal Component Score
3.3 聚類分析
聚類技術可以將短行程分成不同的類,這些類與類之間差異明顯、分割清晰,且自成體系[8]。據一般道路交通特征,可以分成三個類別,分別為高速、中速、低速工況[9]。K-means聚類的流程,如圖4所示。
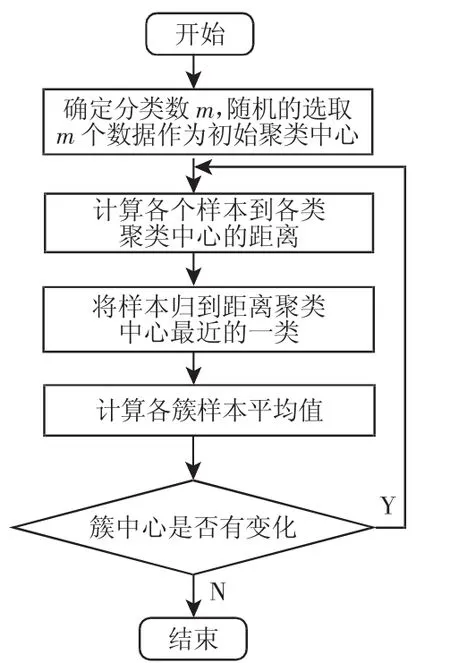
圖4 K-means聚類流程圖Fig.4 K-Means Clustering Process
本研究在MATLAB中編程實現K-means聚類對數據進行處理,聚類的對象是主成分得分,聚類結果,如圖6所示。通過對比圖5和圖6發現聚類界限比較清晰。各類短行程的特征參數如表5所示(其中V1:每一類短行程的平均車速,S1:每一類短行程的平均運行距離,T1:每一類短行程的平均持續時間,Pi、Pa、Pd、Pc分別為怠速、加速、減速、勻速比例)。
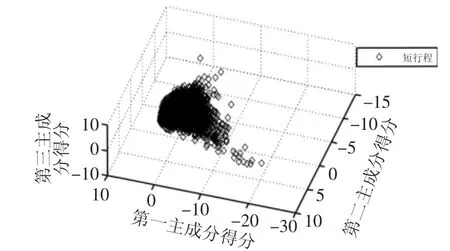
圖5 短行程三維散點圖Fig.5 Short Stroke 3D Scatter Plot
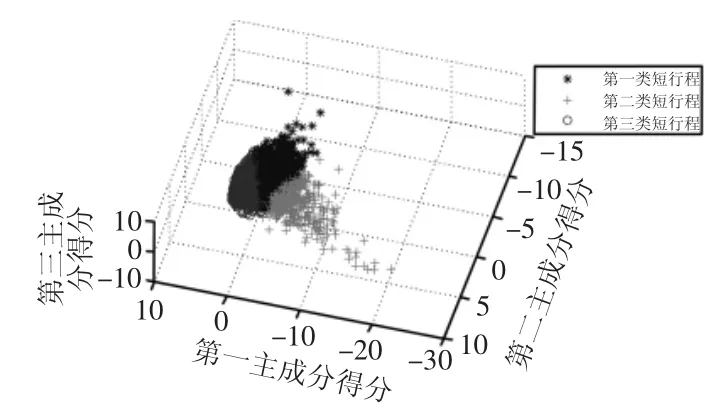
圖6 K-means聚類后短行程三維散點圖Fig.6 3D Scatter Plots of Short Stroke After K-Means Clustering
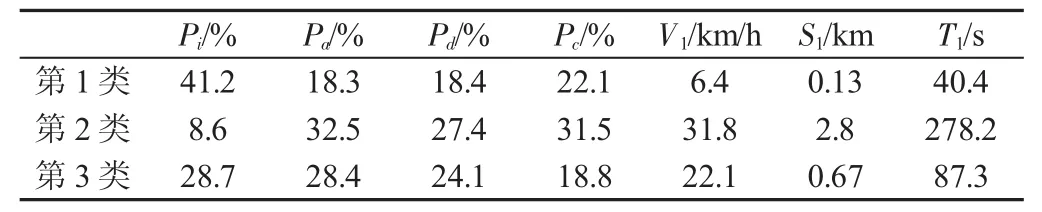
表5 聚成3類各類的短行程特征參數Tab.5 Short-Stroke Three Characteristic Parameters
從表5中可以發現:第1類短行程長度最短(平均為130 m),平均速度最低為6.4km/h,怠速比例最高為41.2%,此類短行程代表了擁堵交通下的低速工況;第3類短行程可以自由地加速,必要時減速,加減速比例較高,而怠速比例較低,對應于中速工況;第2類短行程的怠速比例最低僅為8.6%,短行程的平均長度最長為2.8km,平均速度最高為31.8 km/h,加速比例最大,勻速比例也是最高的為31.5%,對應于高速工況。
4 工況構建與驗證
參考國外標準工況將城市循環工況的時間取為1200s左右[8]。根據各類短行程總時間占整個試驗數據時間的比例和構建的循環工況時間可確定各類短行程在構建的工況中所占的時間,其計算公式如下:
式中:ta—類a在構建的工況中的時間;ta,b—類a中第b個短行程的時間;nb—簇a中的短行程的總數;tall—試驗數據總時間;tcycle—最終構建的代表性工況的時間。
根據各短行程在構建的工況中所占的時間和各類短行程與其聚類中心的距離大小,從低速工況中選取的短行程編號為1281、194、1117、934、3214、967、375、457,從中速工況中選取的短行程編號為 2291、1002、4936、2915、3300、455、5236、1365,從高速工況中選取的短行程編號為2862,構建的鄭州市城市乘用車代表性工況,如圖7所示。
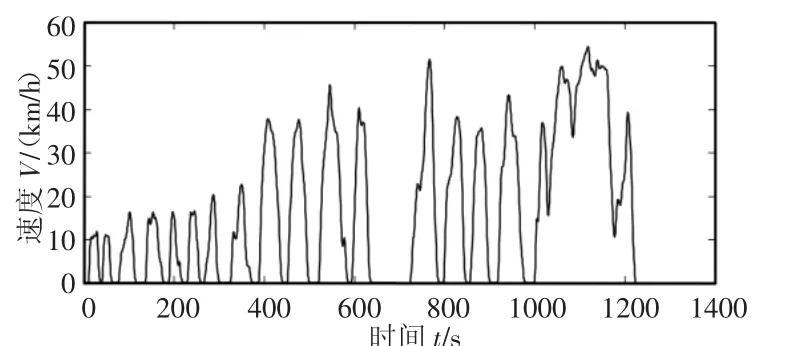
圖7 鄭州市乘用車代表性工況Fig.7 Representative Driving Cycle of Passenger Cars in Zhengzhou
通過對圖7的數據分析可知,鄭州市乘用車循環工況總運行時間為1225s,行駛距離為5.8km,最高速度為54.7km/h,平均速度為17.04km/h,平均運行速度為25.4km/h,最大加速度為2.89m/s2,最大減速度為-1.94m/s2,怠速比例為32.98%,加速比例為24.57%,減速比例為23.67%,勻速比例為18.78%。
為了驗證所構建的鄭州市乘用車循環工況的可靠性,本研究從特征參數、速度-加速度聯合分布、仿真驗證三個方面進行驗證。首先將原始工況與構建的鄭州市乘用車循環工況的特征參數進行對比,結果,如表6所示。Fm為構建的工況特征參數與原始工況特征參數相對誤差的平均值,通過Fm的大小來判定構建的工況精度[10]。Fm的計算公式如下:
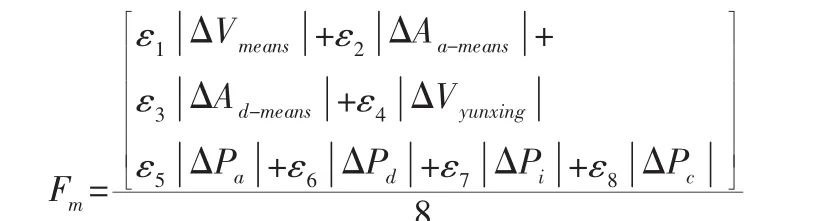
式中:Δ—特征參數的相對誤差;εi(i=1,2,3…8)—各特征參數的加權值,為了研究方便取為1。
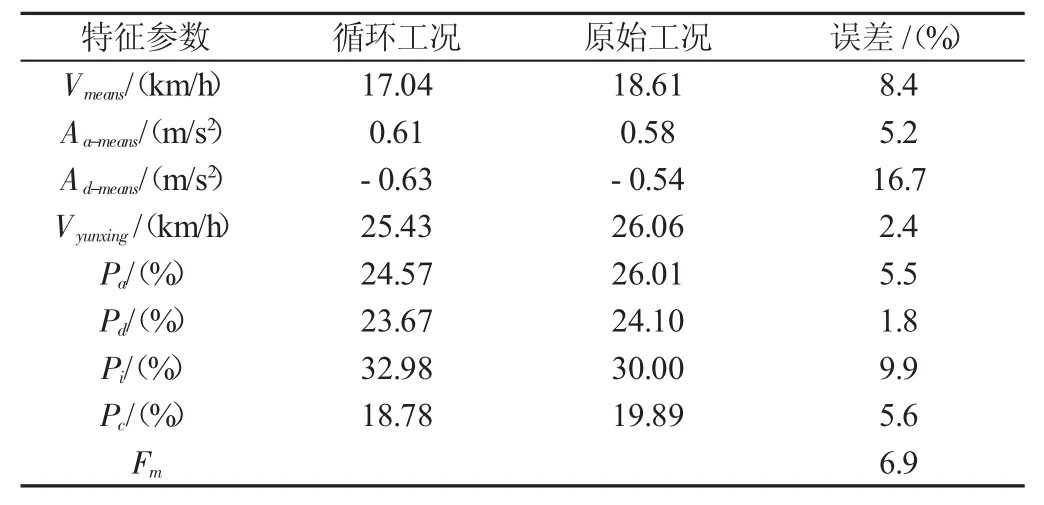
表6 循環工況與原始工況特征參數對比Tab.6 Driving Cycle Characteristic Parameter Comparison with Experimental Data
從表6中可以看出構建的循環工況與原始工況特征參數誤差只有Ad-means相對誤差為16.7%大于10%,其余特征參數的誤差均小于10%,并且Fm=6.9%,符合精度要求。
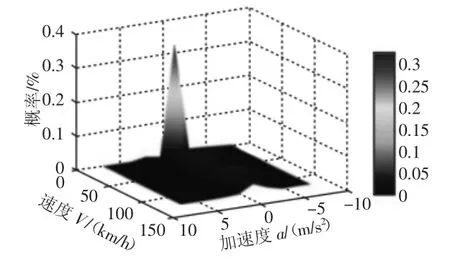
圖8 構建的工況速度-加速度聯合分布Fig.8 Construction Driving Cycle Velocity-Acceleration Joint Distribution
構建工況與原始工況在速度-加速度區間分布如果誤差平均值小于10%,那么構建的工況就是合理的[8]。構建的工況速度-加速度區間分布與原始工況速度-加速度區間分布比較接近,經過計算構建后的工況的速度和加速度區間分布概率與原始工況的速度和加速度區間分布概率的誤差平均值為1.5%小于10%,符合要求,如圖8、圖9所示。

圖9 原始工況的速度-加速度聯合分布Fig.9 Test Data Velocity-Acceleration Joint Distribution
在AVL-Cruise中搭建了整車模型,如圖10所示。整車基本參數,如表7所示。
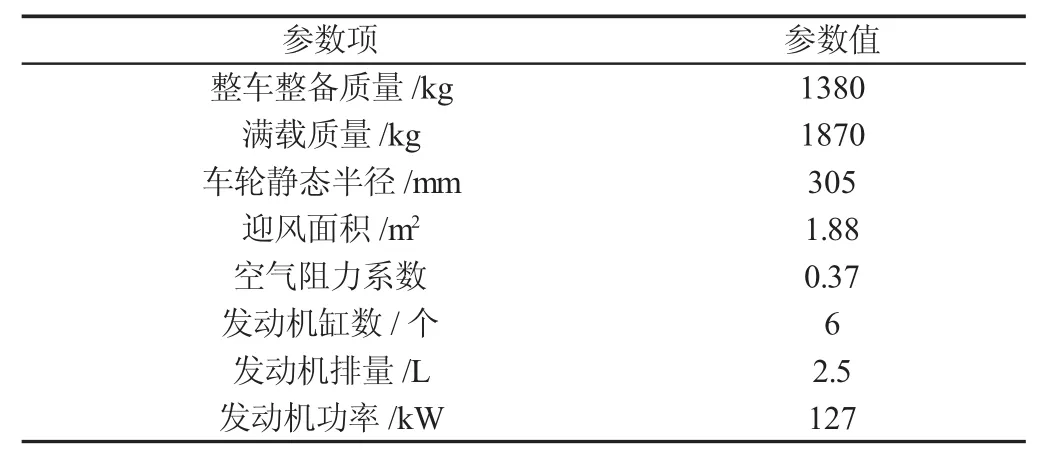
表7 整車基本參數Tab.7 Vehicle Parameters Table
圖10 整車模型Fig.10 Vehicle Model
將構建的工況作為整車仿真的工況進行仿真,其百公里油耗和排放與實際對比,如表8所示。

表8 仿真油耗和排放與實際對比Tab.8 Simulation of Fuel Consumption and Emissions Compared with the Actual
從表8可以看出構建的工況與實際的百公里油耗、NOX、CO、HC的誤差均比較低,符合精度要求。從特征參數、速度-加速度聯合分布、仿真驗證三個方面的驗證結果可以說明構建的工況與原始工況很接近,具有代表性。

表9 循環工況的特征參數對比Tab.9 Comparison of Characteristic Parameters of Driving Cycle
將構建的鄭州市乘用車循環工況與ECE15工況的特征參數進行對比,結果,如表9所示。從表9中可鄭州工況與ECE15工況的特征參數還是有差別的,鄭州市工況的平均速度低、怠速比例高、勻速比例低,交通比較擁堵。
5 結論
(1)本研究運用matlab編程實現試驗采集數據的短行程劃分、主成分分析(PCA)和K-means聚類分析,構建了具有代表性的鄭州市乘用車行駛工況,并且驗證了構建的代表性工況的可靠性,實踐證明了此構建方法的合理性。
(2)對比分析了鄭州工況與ECE15工況,結果發現,ECE15工況顯然不能真實反映出鄭州市實際的交通狀況。建議地方政府采用鄭州市自身的乘用車行駛工況,以便制定出更科學更符合實際的乘用車污染控制對策。