船用減搖陀螺儀性能仿真分析
2018-08-30 08:50:08翟亞軍張懷宇
機電設備 2018年4期
關(guān)鍵詞:船舶
翟亞軍,張懷宇
(中遠海運重工有限公司,上海 210120)
0 引言
船舶減搖是提升船舶航行舒適性與安全性的重要途徑[1]。在隨機海面上航行的船舶的橫搖影響著船舶的適航性、安全性、船上設備精確性以及乘員的舒適性。因此,減小船舶的搖擺有著諸多現(xiàn)實意義。
船舶減搖一直是船舶行業(yè)研究的熱點[2]。目前常見的減搖方式有鰭減搖、舵減搖、減搖水艙和減搖陀螺儀,這些減搖方式各具特點。對鰭減搖和舵減搖的研究開始較早,也比較深入全面,這 2種方式目前在船舶減搖市場上占有很高的比例,但鰭減搖和舵減搖的減搖能力和船速有關(guān),船速越慢,減搖效果越差,且一旦減搖裝置發(fā)生故障,會產(chǎn)生附加阻力,直接影響到船舶的快速性。減搖水艙占用的體積空間大,被動減搖水艙在波浪過大時甚至會加劇船舶的搖擺,主動減搖水艙則需要很大的動力系統(tǒng),所以成本過高。
減搖陀螺儀作為一種減搖裝置,其性能隨著陸上的平衡小車、機器狗等新發(fā)明的平臺的產(chǎn)生,正在為研究人員所重視[3]。將其固定在船舶適當?shù)奈恢蒙希酶咚俎D(zhuǎn)動陀螺的進動作用產(chǎn)生減搖力矩,可以減輕船舶的橫搖。采用陀螺原理減輕船舶橫搖的構(gòu)想很早就被提出,但由于技術(shù)和材料的限制,一直沒有發(fā)展、完善起來。近年來,隨著新技術(shù)、新材料的應用,陀螺減搖技術(shù)正在從陸上走向水上。隨著經(jīng)濟生活的發(fā)展,游艇作為反映社會經(jīng)濟水平的標準性產(chǎn)品,正在逐步普及。陀螺儀減搖裝置以其體積小、安裝簡便的特點,在提高游艇舒適性和平穩(wěn)性方面具有得天獨厚的優(yōu)勢[4]。本文建立減搖陀螺裝置三維模型和船舶橫搖非線性數(shù)學模型,在此基礎上利用Adams軟件進行動力學仿真,在給定的特定船型上驗證了陀螺減搖裝置在不同海況下的減搖性能,分析了陀螺減搖能力和船舶排水量大小的關(guān)系。
1 減搖陀螺的減搖性能模擬
對減搖陀螺減搖性能的模擬包含了船舶、波浪及減搖陀螺克服波浪的激勵的反向力矩間三者的耦合作用。因此,建立三者間的力矩平衡模型是進行減搖陀螺減搖性能模擬研究的關(guān)鍵。
1.1 波浪作用下船舶與減搖陀螺耦合橫搖力矩平衡非線性數(shù)學模型
船舶實際運行中,在波浪作用下的阻尼力矩和恢復力矩呈非線性關(guān)系,以Mathiue[x]方程為基礎,建立船舶單自由度非線性橫搖運動方程。

橫搖阻尼力矩取HADARRA等提出的線性阻尼加立方阻尼的形式。

為使計算簡便,將回復力矩近似為一個五次多項式。

式中:K1、K3、K5為恢復力矩系數(shù)。
將隨機波浪激勵表示為波傾角的函數(shù),干擾力矩為

式中:D為船舶的排水量;h為橫穩(wěn)性高;α(t)為波傾角,它是時間的函數(shù),由隨機波浪疊加而成,可由波傾角頻譜定義。

式中:ω為諧波頻率;εn為在(0,2)內(nèi)均勻分布的隨機相位角;N為所選取諧波個數(shù);遭遇頻率ωe=ω-kucosx;k為波數(shù);u為船舶航行速度;sσ(ω)為波傾角頻譜函數(shù),可由海浪譜函數(shù)sξ(ω)獲得。

式中:g是重力加速度。將式(2)~(4)帶入式(1),可得到隨機波浪作用下的船舶非線性橫搖運動方程。


忽略陀螺外框架的質(zhì)量,不考慮船舶在其他自由度上的運動對陀螺減搖裝置的影響,轉(zhuǎn)子為軸對稱剛體,其相對Oz軸的轉(zhuǎn)動慣量為I,相對于Ox和Oy軸的轉(zhuǎn)動慣量為J,轉(zhuǎn)子轉(zhuǎn)速恒定為oω,β為轉(zhuǎn)子相對于Oy軸的進動角。

圖1 系統(tǒng)坐標系
根據(jù)剛體定點運動的歐拉方程,陀螺減搖裝置相對于轉(zhuǎn)動坐標系Oxyz的運動方程為
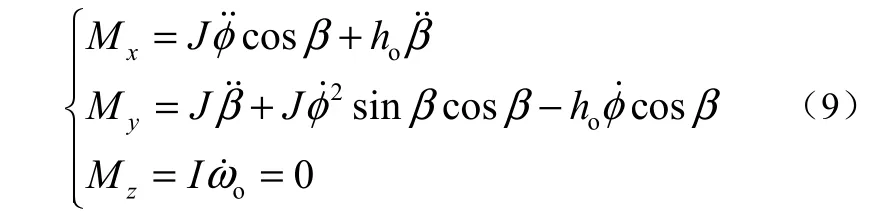
式中:Mx、My、Mz分別為合外力局矢量在 Oxyz坐標系上的分量;ho為陀螺的動量距常數(shù), ho=Iωo。顯然,若以Oy軸為輸入軸,輸入力矩為My,使陀螺產(chǎn)生進動,則在Ox軸將會有力矩Mx輸出。將以上運動方程中輸出力矩Mx投影到平動坐標系中,由于高速旋轉(zhuǎn)陀螺的穩(wěn)定性,角速度˙、和ωo極小,忽略其二階微量,則以上動力學方程簡化為

由此可見,若在Oχγz輸入力矩My,則陀螺裝置會分別在 Oξ、O?兩個軸向輸出力矩 Mξ和M?,而 Mξ可用來抑制波浪激勵產(chǎn)生的船舶橫搖。陀螺減橫搖能力大小由陀螺轉(zhuǎn)子動量距和角速度的乘積來決定,也就是說,陀螺減搖裝置的減搖能力由轉(zhuǎn)子相對轉(zhuǎn)軸的質(zhì)量分布、轉(zhuǎn)動角速度以及進動角來決定。
1.2 SolidWorks建模仿真
SolidWorks是一款功能強大的三維制圖軟件。以陀螺儀減搖原理為理論基礎,在分別設計出各個零部件之后,用SolidWorks的裝配功能把零部件組裝起來,形成裝配體。為了便于后面的仿真分析,圖2顯示的是簡易版的減搖裝置裝配體。選擇氣彈簧作為模擬海浪作用在船體的裝置,普通彈簧受力不穩(wěn)定性,而氣彈簧速度相對緩慢、動態(tài)力變化不大(一般在 1∶1.2以內(nèi))、容易控制,而且具有幾乎線性的弾性曲線。氣彈簧能更加準確地實現(xiàn)海浪作用在船舶上的真實效果。為了便于后續(xù)的仿真分析,在不影響仿真結(jié)果的基礎上,本機構(gòu)對于一些造成冗余約束的機構(gòu)進行簡化,并且去除一部分影響仿真的因素,比如:刪除了軸承和電機,用旋轉(zhuǎn)副代替;刪除了螺栓螺帽,用固定副代替。

圖2 減搖裝置裝配體
為了研究減搖裝置在橫浪中對船舶橫搖運動的抑制作用,并考慮到本文所設計的船用陀螺儀的適用性,采用1.8 m海浪2號無人艇為仿真試驗船舶,如圖3所示。橫搖參數(shù)根據(jù)模型試驗獲得,該船的基本參數(shù)如表1所示。

圖3 海狼2號無人艇

表1 船舶結(jié)構(gòu)基本參數(shù)
2 Admas仿真與分析
在SolidWorks三維建模的基礎上,把裝配體保存為parasolid(*.x_t)格式,導入到Adams中,如圖4所示。Adams軟件使用交互圖形環(huán)境和零件庫、約束庫、力庫,創(chuàng)建完全參數(shù)化的機械系統(tǒng)幾何模型,其求解器采用多剛體系統(tǒng)動力學理論中的拉格朗日方程方法,建立系統(tǒng)動力學方程,對虛擬機械系統(tǒng)進行靜力學、運動學和動力學分析,輸出位移、速度、加速度和反作用力曲線。

圖4 Adams仿真模型
海浪模型可分為二維長峰波隨機海浪模型和三維不規(guī)則短峰波隨機海浪模型[5]。二維長峰波隨機海浪也被稱為二元不規(guī)則波或長峰波,是指海浪向著一個確定的方向傳播,其波峰和波谷相互平行并與波浪前進方向垂直。三維不規(guī)則短峰波隨機海浪是指由風激勵產(chǎn)生的波浪,由于風方向的隨機性,其波浪不僅會向一個方向傳播,同時也會向其他方向傳播,從而在海面上形成一個個大小不等的小丘,也稱為三元不規(guī)則波或者短峰波。本文采用二元不規(guī)則波仿真研究船舶在隨機海浪中的動力學特性。可以近似地把長風波波形看做正弦函數(shù)圖像形式。用正弦函數(shù)A*sin(Bd*time)來模擬海浪周期和大小,其中A指的是海浪的振幅,B指的是海浪在x軸上單位時間內(nèi)所運動距離,即周期。海上波浪實際上是不規(guī)則的,它們由各種不同波長、波高和陡度的波組成。經(jīng)觀測統(tǒng)計表明[6]:1/10的波的波高是平均波高的 2倍,其被稱為最大波高(hw/10);1/3的波的波高是平均波高的1.6倍,其被稱為三一平均波高或有義波高(hw/3)。人們在海上目測的波高很接近有義波高。為了使仿真更加便捷、更具針對性,文章所使用的波高為有義波高。不同海浪等級所對應的有義波高如表2所示。

表2 不同海浪等級所對應的義波高
為了更加準確方便地模擬海浪,本文取用有義波高來模擬不同級別的海浪,如圖5所示。分別在陀螺減搖系統(tǒng)轉(zhuǎn)子轉(zhuǎn)速為0 r/min和8 000 r/min的情況下,對不同等級的海浪進行Adams動力學仿真,設置仿真時間為10 s,仿真步數(shù)為5 000,如圖6所示。

圖5 有義波高

圖6 陀螺轉(zhuǎn)子轉(zhuǎn)速和仿真步數(shù)
一級海浪下,陀螺減搖系統(tǒng)轉(zhuǎn)子轉(zhuǎn)速分別為0 r/min和8 000 r/min時的仿真結(jié)果如圖7所示。

圖7 一級海浪仿真結(jié)果
二級波浪下,陀螺減搖系統(tǒng)轉(zhuǎn)子轉(zhuǎn)速分別為0 r/min和8 000 r/min時的仿真結(jié)果如圖8所示。

圖8 二級海浪仿真結(jié)果
三級波浪下,陀螺減搖系統(tǒng)轉(zhuǎn)子轉(zhuǎn)速分別為0 r/min和8 000 r/min時的仿真結(jié)果如圖9所示。

圖9 三級海浪仿真結(jié)果
四級波浪下,陀螺減搖系統(tǒng)轉(zhuǎn)子轉(zhuǎn)速分別為0 r/min和8 000 r/min的仿真結(jié)果如圖10所示。

圖10 四級海浪仿真結(jié)果
五級波浪下,陀螺減搖系統(tǒng)轉(zhuǎn)子轉(zhuǎn)速分別為0 r/min和8 000 r/min時的仿真結(jié)果如圖11所示。

圖11 五級海浪仿真結(jié)果
根據(jù)仿真結(jié)果,可以看出:當海浪等級小于三級時,本文所設計的船用陀螺儀有很好的減橫搖功能,在一級波浪的時候,減搖性能甚至可以達到90%左右。但由圖10可以看出:當波浪等級為四級時,陀螺減搖裝置的減搖效果已經(jīng)很弱了,但是可以減小船舶的橫搖頻率。由圖11可以看出:當波浪大于五級時,減搖裝置不僅不能減搖,還會增加橫搖。此處需要注意一個問題,即一般船舶抗風浪能力在一定程度上和船舶的噸位相關(guān),船舶噸位越大,相應的抗風浪等級越強。本文所設計陀螺儀搭配的船舶噸位較小,其抗風浪能力相對較小。而對于一般非軍用船舶來說,即使有一定抗風浪能力,公司船東也不會允許船舶在大風浪天氣下航行,因為大風浪會造成各種不可抗拒因素,一般遇到四級或者五級海浪,小型船舶就會選擇進港避風。
船用陀螺儀抗橫搖能力和轉(zhuǎn)子相對于轉(zhuǎn)軸的位置有關(guān),即是和轉(zhuǎn)動慣量有關(guān)。本試驗中的陀螺轉(zhuǎn)子質(zhì)量較小,因此減搖能力有限,當換用較大轉(zhuǎn)子后,減搖能力會增強。同時,可以減少影響轉(zhuǎn)子轉(zhuǎn)動速度的因素,提高轉(zhuǎn)子的轉(zhuǎn)動速度,比如可以使陀螺轉(zhuǎn)子在一個真空密閉的環(huán)境中轉(zhuǎn)動,這樣可以使轉(zhuǎn)子的轉(zhuǎn)速提高兩倍以上,重量減輕三分之一,用電量僅為過去的二分之一。
根據(jù)仿真結(jié)果,可以發(fā)現(xiàn)本試驗裝置的兩個明顯弱點:1)打開減搖裝置的瞬間,會給船舶造成一個類似于快速抖動的影響;2)當波浪等級過大時,陀螺減搖裝置不但不會減搖,甚至還會增強船舶橫搖。對于這種現(xiàn)象,可以為減搖系統(tǒng)增加一個控制器,以此來控制陀螺減搖裝置進動,使其在受外力矩作用時,也能實現(xiàn)主動控制進動,從而減少搖晃。
3 結(jié)論
本文所設計的減搖裝置可以在一定程度上減輕船舶橫搖。在理論分析和實際運用的基礎上,可以得出陀螺減搖器容量選擇范圍:總動量距(kNms)=船舶排水量(t)×選擇系數(shù),選擇系數(shù)應在0.20~0.40之間,根據(jù)船舶的其他技術(shù)參數(shù)及航行海況進行確定。由此結(jié)論可以看出:如果陀螺轉(zhuǎn)子擁有更加大的轉(zhuǎn)速和質(zhì)量,并加入主動進動控制系統(tǒng),那么可以明顯增加陀螺系統(tǒng)的減搖能力。此外,可以在同一艘船舶上使用多個陀螺減搖系統(tǒng),以獲得很好的效果。
猜你喜歡
艦船科學技術(shù)(2022年14期)2022-09-22 03:08:26
艦船科學技術(shù)(2022年14期)2022-09-22 03:07:40
機械工業(yè)標準化與質(zhì)量(2022年6期)2022-08-12 02:07:42
艦船科學技術(shù)(2022年2期)2022-03-29 01:12:44
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
軍工文化(2017年12期)2017-07-17 06:08:06
中國船檢(2017年3期)2017-05-18 11:33:09
船海工程(2015年4期)2016-01-05 15:53:30
